硬件仿真(SIH)
硬件仿真(SIH)是一种替代软件仿真的方法。 硬件环路模拟(HITL) 用于四旋翼飞行器、固定翼飞行器(飞机)和 VTOL 尾翼飞行器。
PX4 的新用户可以使用 SIH 来熟悉 PX4 以及不同的模式和功能,当然也可以学习在模拟环境中使用遥控控制器来驾驶飞行器,而这是 SITL 无法实现的。
概述
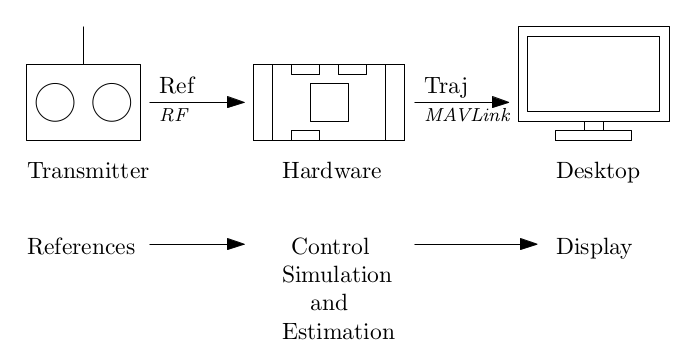
利用 SIH,整个模拟都在嵌入式硬件上运行:控制器、状态估计器和模拟器。台式电脑仅用于显示虚拟载具。
兼容性
- SIH 与所有 Pixhawk 系列板卡兼容,但基于 FMUv2 的板卡除外。
- 从 PX4 v1.9 开始支持四旋翼飞行器的 SIH。
- 从 PX4 v1.13 版开始支持固定翼(飞机)和 VTOL 尾翼的 SIH。
- SIH 作为 SITL(无硬件),来自 PX4 v1.14。
益处
与 HITL 相比,SIH 有几个优点:
- 它避免了与计算机的双向连接,从而确保了同步定时。因此,用户不需要如此强大的台式电脑。
- 整个模拟仍在 PX4 环境中进行。熟悉 PX4 的开发人员可以更轻松地在模拟器中加入自己的数学模型。例如,他们可以修改空气动力学模型或传感器的噪音水平,甚至添加一个要模拟的传感器。
- 代表飞行器的物理参数(如质量、惯性和最大推力)可以很容易地从 SIH 参数.
要求
要运行 SIH,您需要
从 PX4 v1.14 开始,您可以将 SIH 作为 SITL 运行,在这种情况下不需要飞行控制器。
设置 SIH
设置 SIH
- 用 USB 电缆将飞行控制器连接至台式电脑
- 打开 QGroundControl,等待飞行控制器启动并连接。
- 开放 载具设置 > 机身 然后选择所需的帧:
然后自动驾驶仪将重新启动。重启后 sih 模块启动后,地面控制站地图上应显示飞行器。
警告
飞机需要以手动模式全油门起飞。此外,如果飞机坠毁,状态估计器可能会丢失其固定值。
设置显示屏
显示模拟载具:
关闭 QGroundControl (如果打开)。
拔下飞行控制器的插头并重新插上(让它启动几秒钟)。
调用脚本启动 jMAVSim jmavsim_run.sh 从终端进行操作:
吁./Tools/simulation/jmavsim/jmavsim_run.sh -q -d /dev/ttyACM0 -b 2000000 -o旗帜在哪里
-q使通信能够 QGroundControl (可选)。-d启动串行设备/dev/ttyACM0在 Linux 上。在 macOS 上,这将是/dev/tty.usbmodem1.-b将串行波特率设置为2000000.-o中启动 jMAVSim 仅显示 模式(即关闭物理引擎,jMAVSim 只实时显示由 SIH 提供的轨迹)。- 加旗
-a显示飞机,或 '-t' 显示尾翼。如果没有该标志,则默认显示四旋翼飞行器。
几秒钟后 QGroundControl 可以再次打开。
至此,系统就可以上膛和飞行了。可在 jMAVSim 和 QGC 上观察飞行器的移动情况 飞 查看。
作为 SITL 运行 SIH(无硬件)
从 v1.14 版起,SIH 可作为 SITL(软件在环)运行。这意味着仿真代码在笔记本电脑/计算机上执行,类似于 Gazebo 或 jMAVSim。在这种情况下,您不需要飞行控制器硬件。
以 SITL 运行 SIH:
安装 PX4 开发工具链.
为每种载具类型运行相应的 make 命令(在 PX4-Autopilot 资源库的根目录下):
四旋翼飞行器:
吁生产 px4_sitl sihsim_quadx固定翼(飞机):
吁生产 px4_sitl 飞机XVert VTOL 尾翼設計:
吁生产 px4_sitl sihsim_xvert
SITL 可使模拟运行速度超过实时速度。要以比实时快 10 倍的速度运行飞机模拟,请运行命令 L
px4_sim_speed_factor=10 生产 px4_sitl 飞机动态模型
各种载具的动态模型如下
- 四旋翼飞行器 pdf 报告.
- 固定翼:灵感来自博士论文:"敏捷固定翼无人飞行器的动力学建模"Khan,Waqas,导师:Nahon,Meyer,麦吉尔大学,博士论文,2016 年。
- 尾翼飞行器:灵感来自硕士论文:"飞翼尾翼无人飞行器的建模与控制"Chiappinelli,Romain,导师:Nahon,Meyer,麦吉尔大学,硕士论文,2018 年。
视频
荣誉
SIH 最初由 Coriolis g 公司开发。飞机模型和尾翼模型由 Altitude R&D inc. 公司添加。这两家公司都是加拿大公司:
该模拟器根据 BSD 许可免费发布。