Holybro X500 V2 + Pixhawk 6C(PX4 开发套件)
本主题提供了构建 Holybro X500 V2 ARF 套件也称为 Holybro PX4 Dev Kit。

装配
信息
- 选择本文档中的图片,即可观看该步骤的 youtube 视频。
- 每个部分的顶部都列出了所需的螺丝。
有效载荷和电池座
螺钉- M2.5*6 沉头螺钉 12 件
将吊架橡胶环垫圈分别插入各自的吊架中。不要用尖锐物体将橡胶压入内部。

取下电池安装板,使用 M2.5*6 沉头螺钉将其与滑杆夹拧紧。

用 M2.5*6 沉头螺钉将 4 个吊架拧到平台板上。
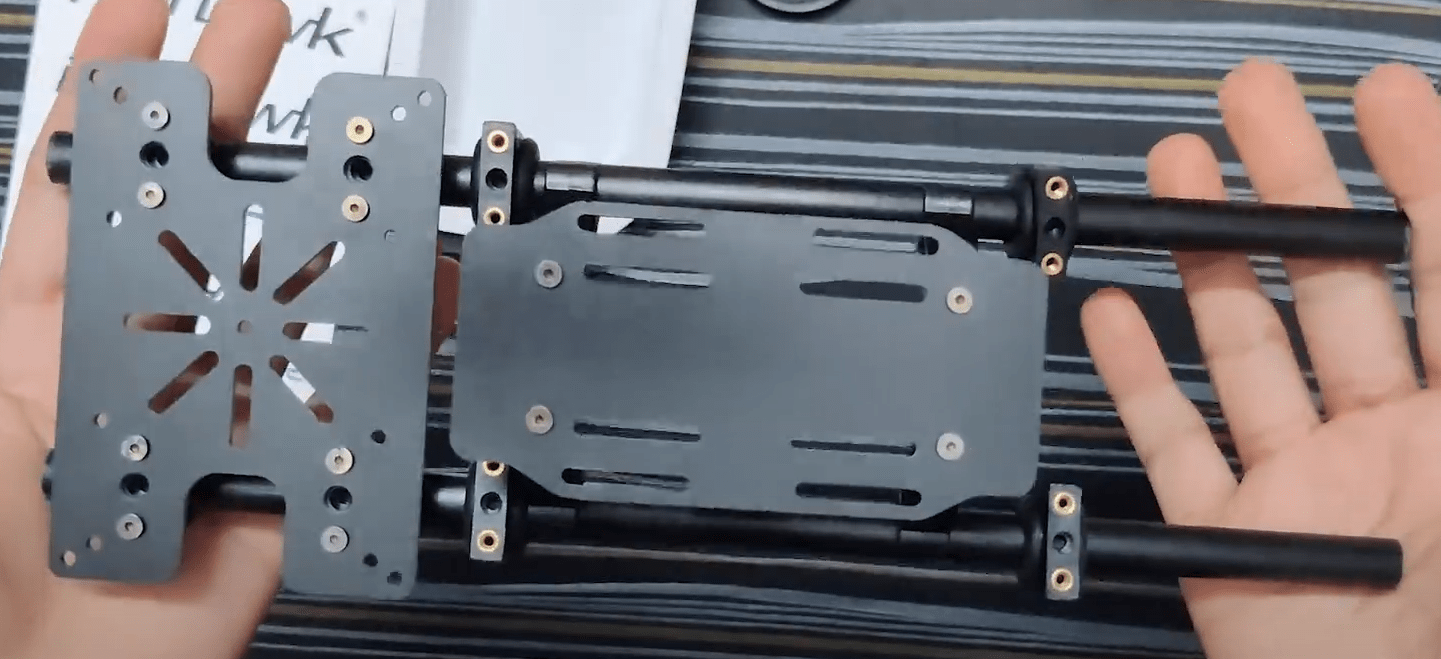 )
)取下滑杆,插入 4 个吊架,稍后用螺丝固定在底板上。
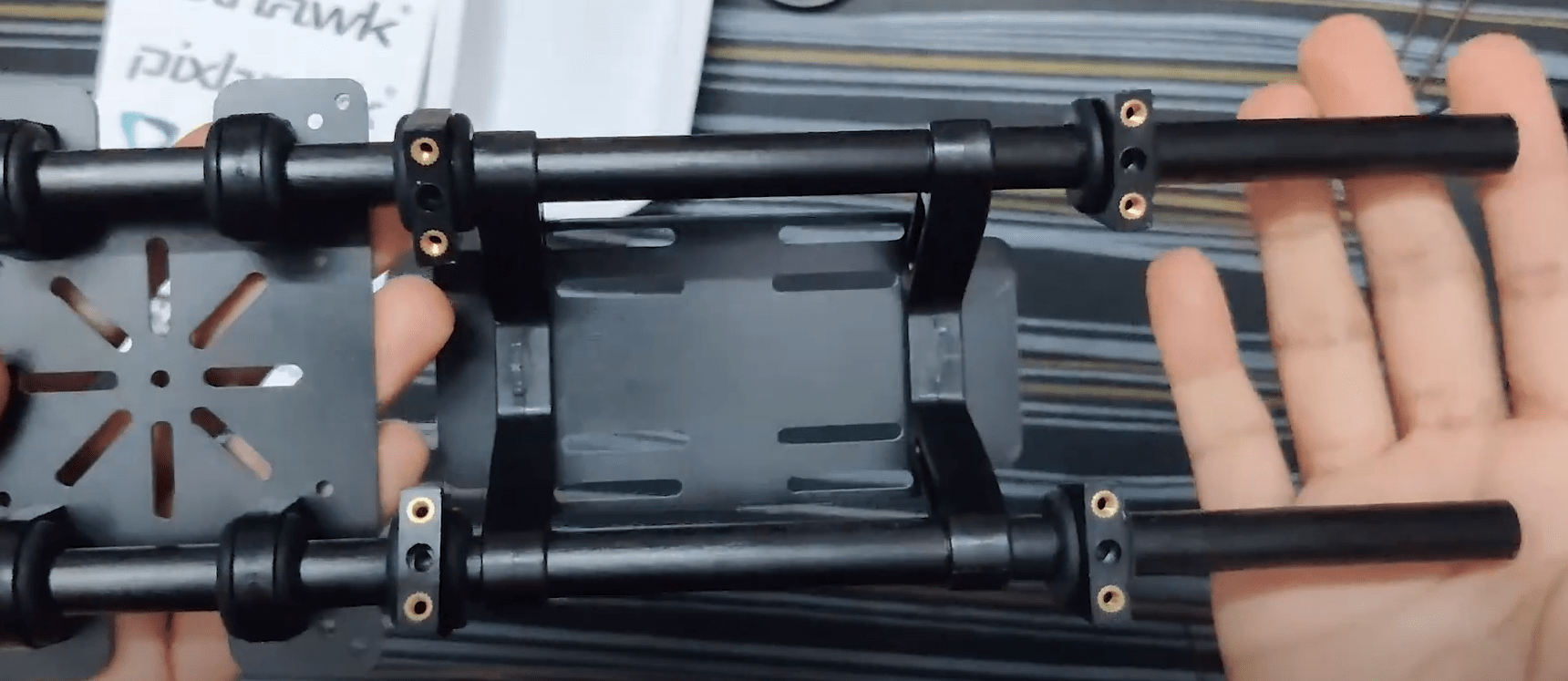 )
)现在插入步骤 2 装配好的电池座和有效载荷座; 3
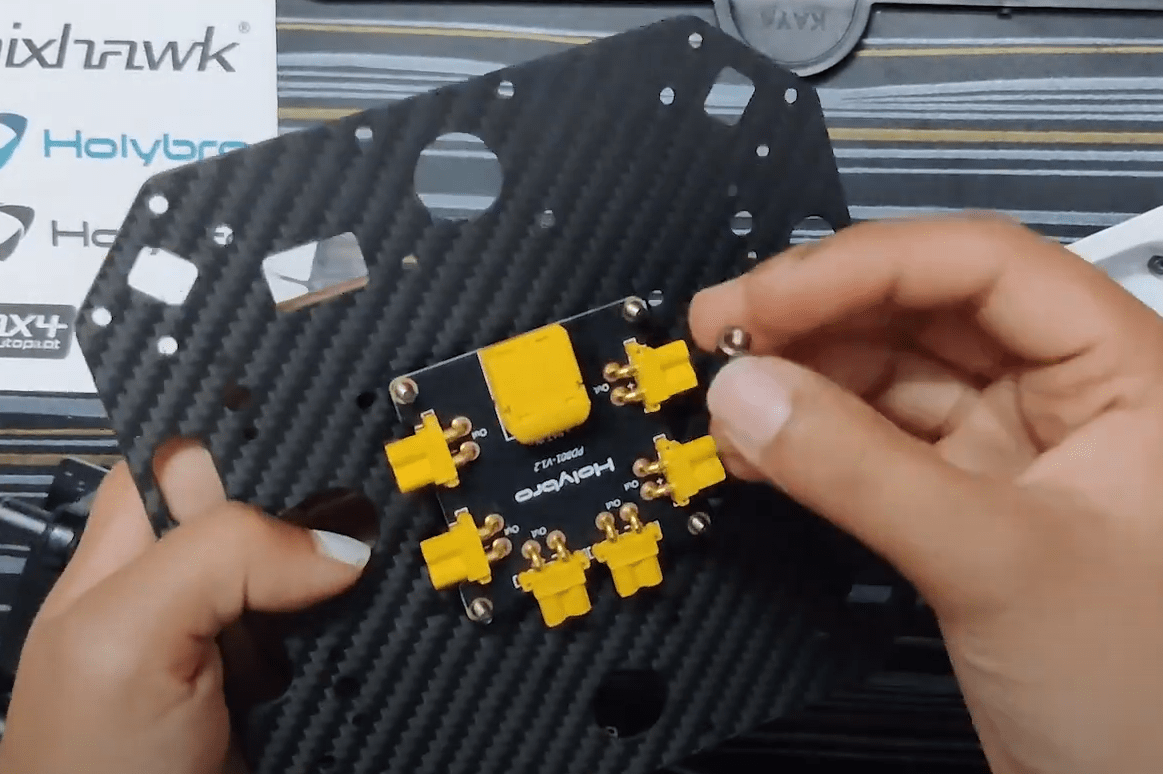
电源模块
螺钉- 内六角螺钉 M2.56 8 个 | 防松螺母 M3 4 个 | 尼龙支座 M35 4 个 | M3*14 螺钉 4 个
 )
)
取下底板,插入 4 颗 M3*14 螺钉,并将尼龙支座固定在底板上。
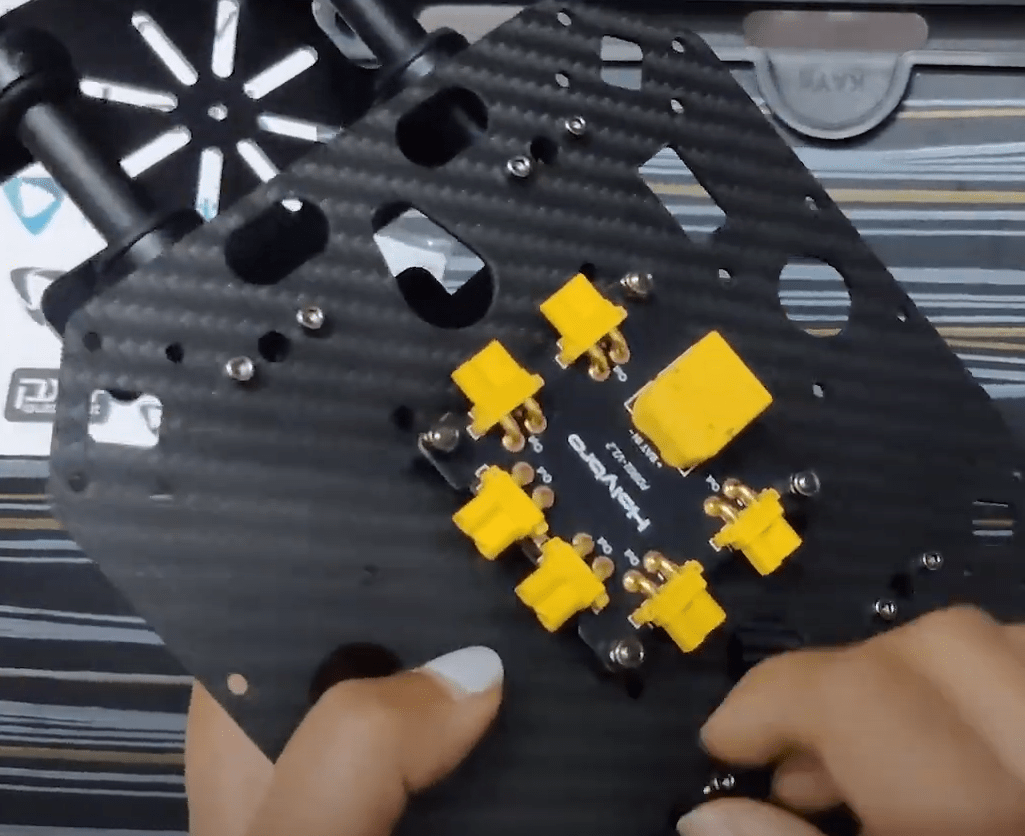
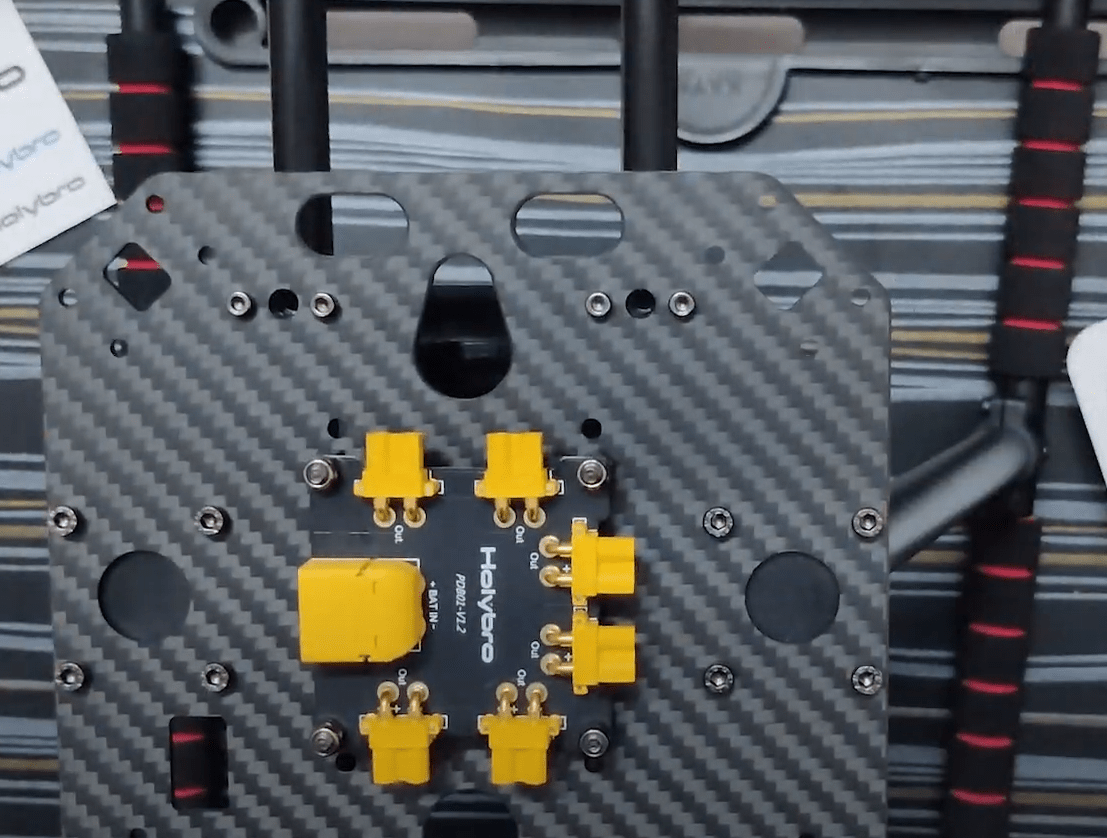
放置配电板并使用锁紧螺母将其组装起来。电源模块 PM02(用于 Pixhawk 6C)将为该板供电
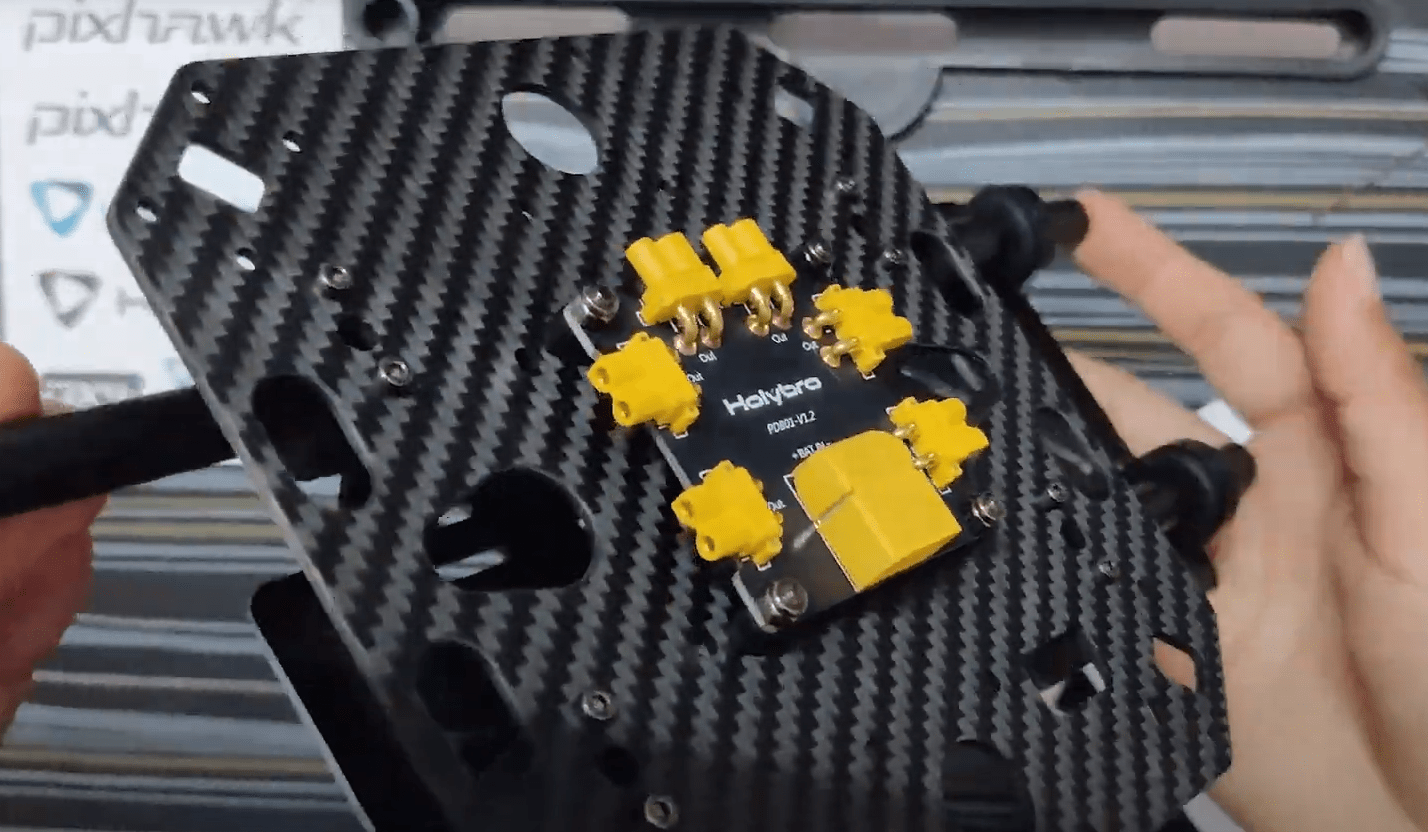
使用 M2.5*6 内六角螺钉将底板拧在 4 个吊架上(我们在有效载荷支架组装的第 3 步将其插入 2 根横杆中)。
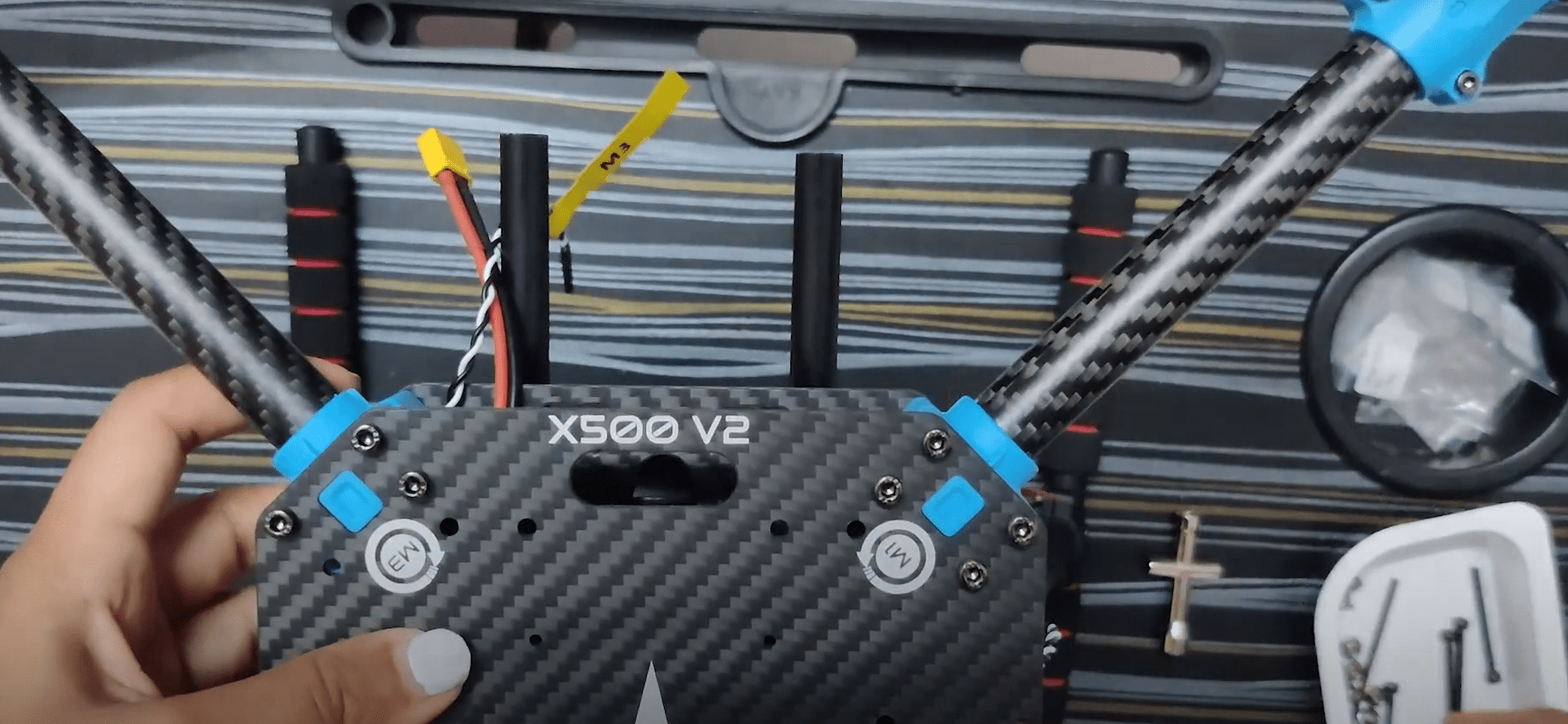
起落架
组装起落架时,松开起落架-横杆的预装螺钉,插入起落架-垂直杆并拧紧。
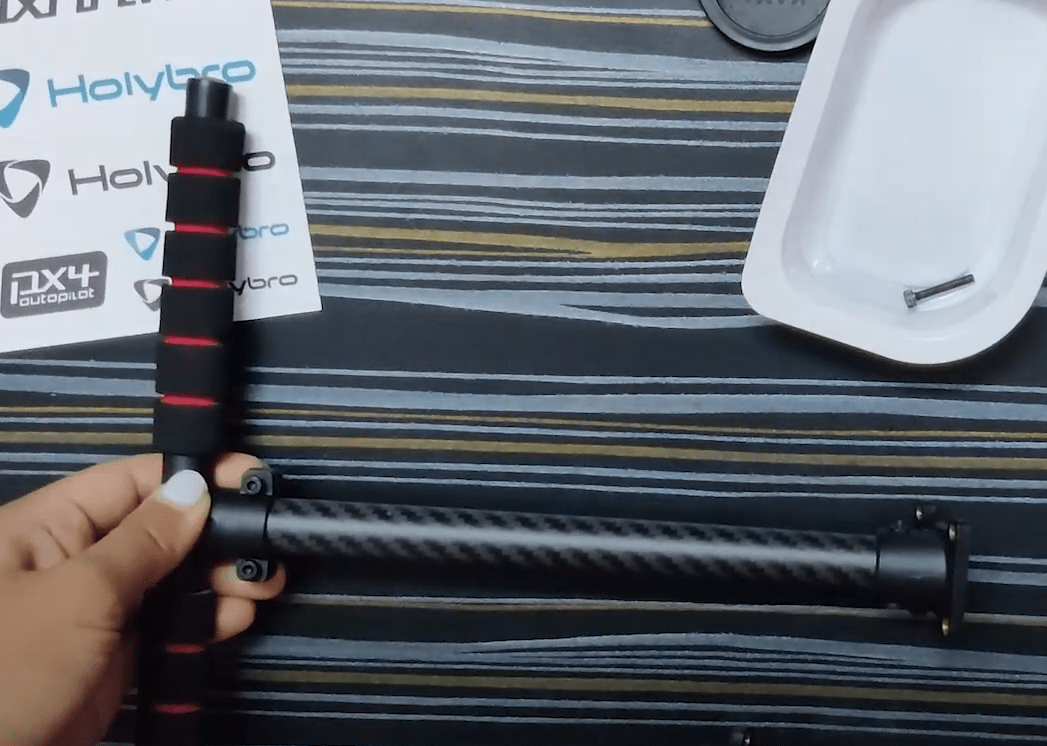

用 M3*8 内六角螺钉将起落架拧到底板上
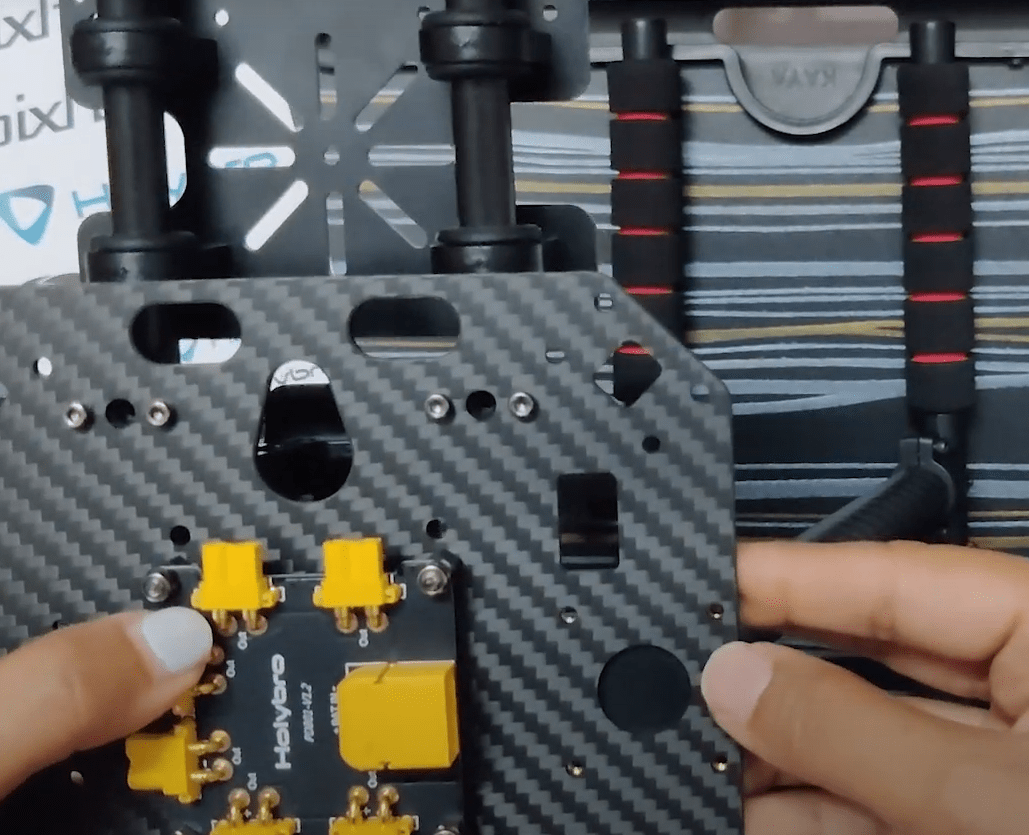
因为顶板组装好后再插入电线比较麻烦,所以要事先做好接线工作。虽然这种设计很好,您也可以稍后再做。
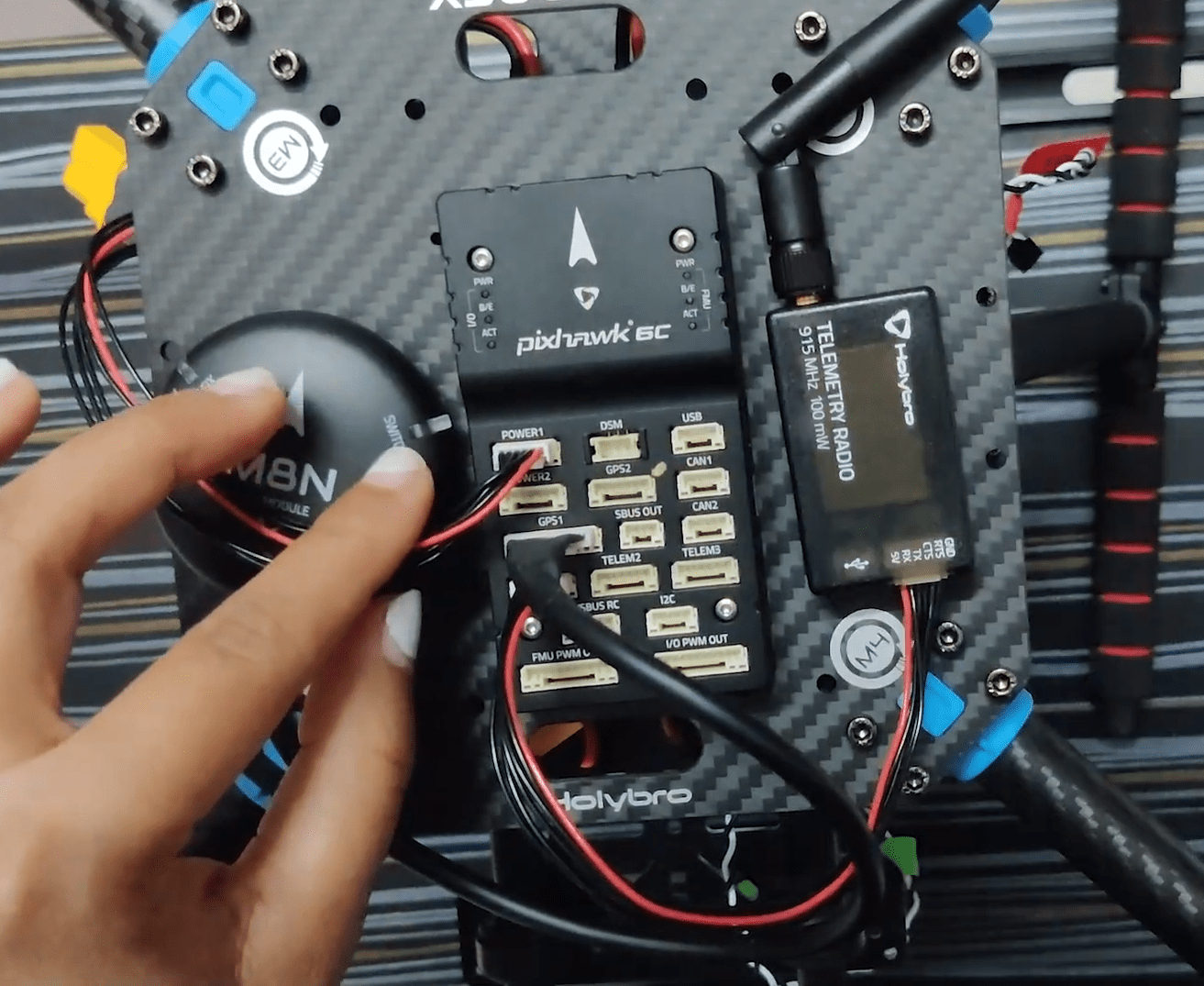
电源
Pixhawk 6C 由电源模块 PM02(本例中)供电。该电源模块由一块电池(4S 16.8V 5200 mAh)供电。
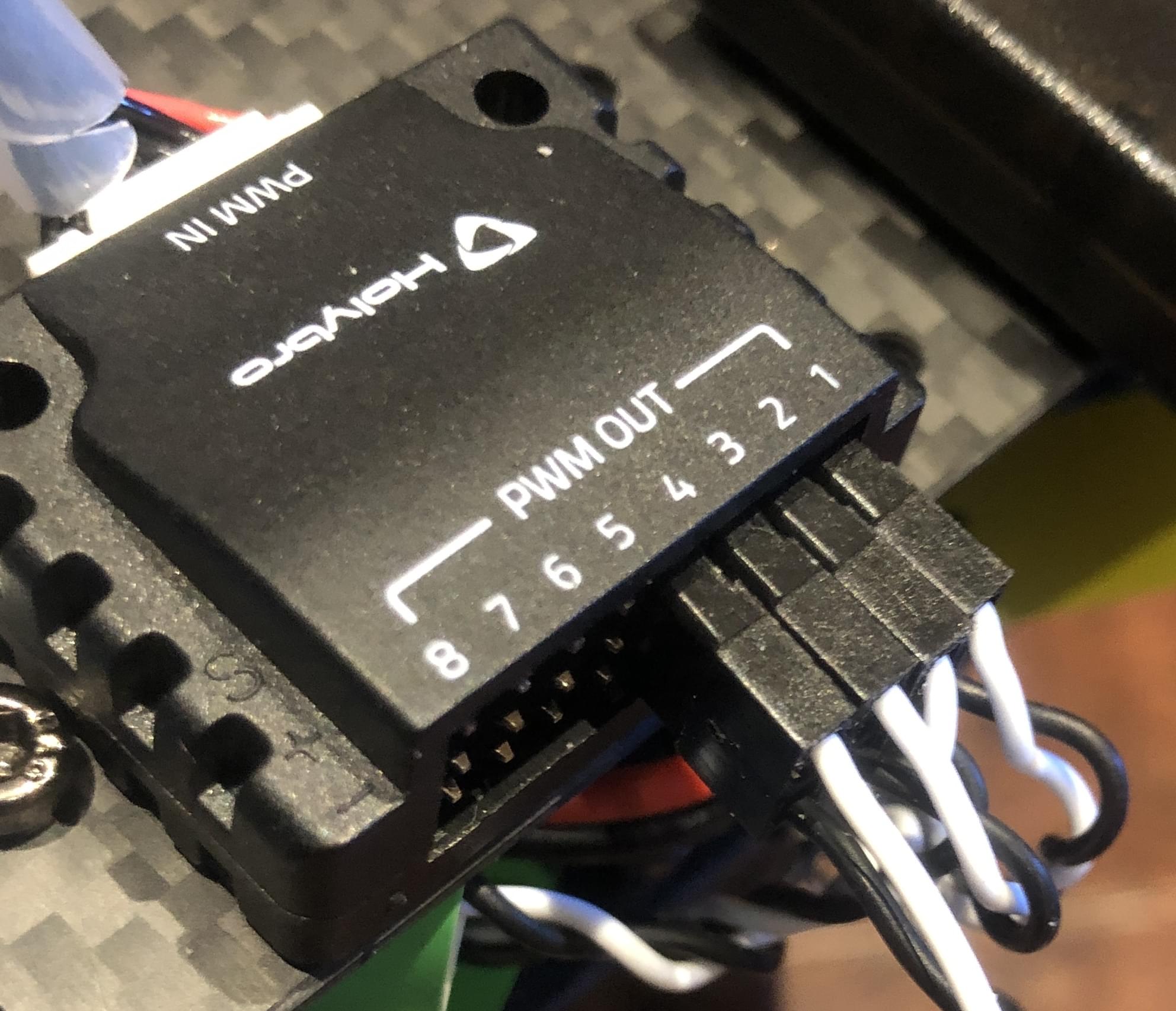
如下图所示,电机通过配电板供电。
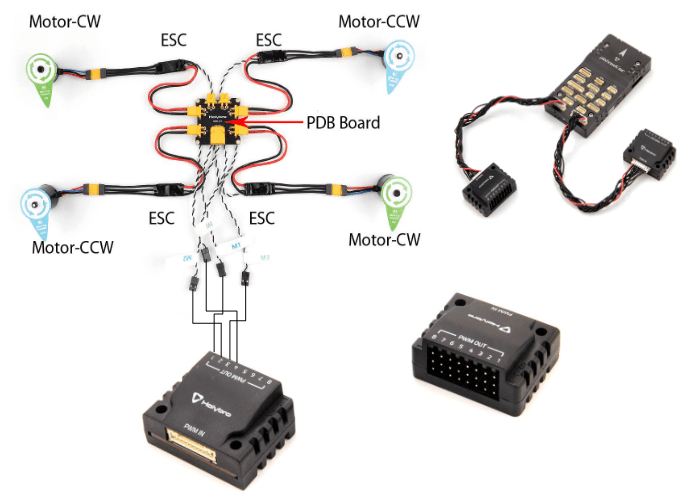
请注意,电调连接器是用颜色编码的,必须插入 PWM 输出端,使白色电缆朝上。
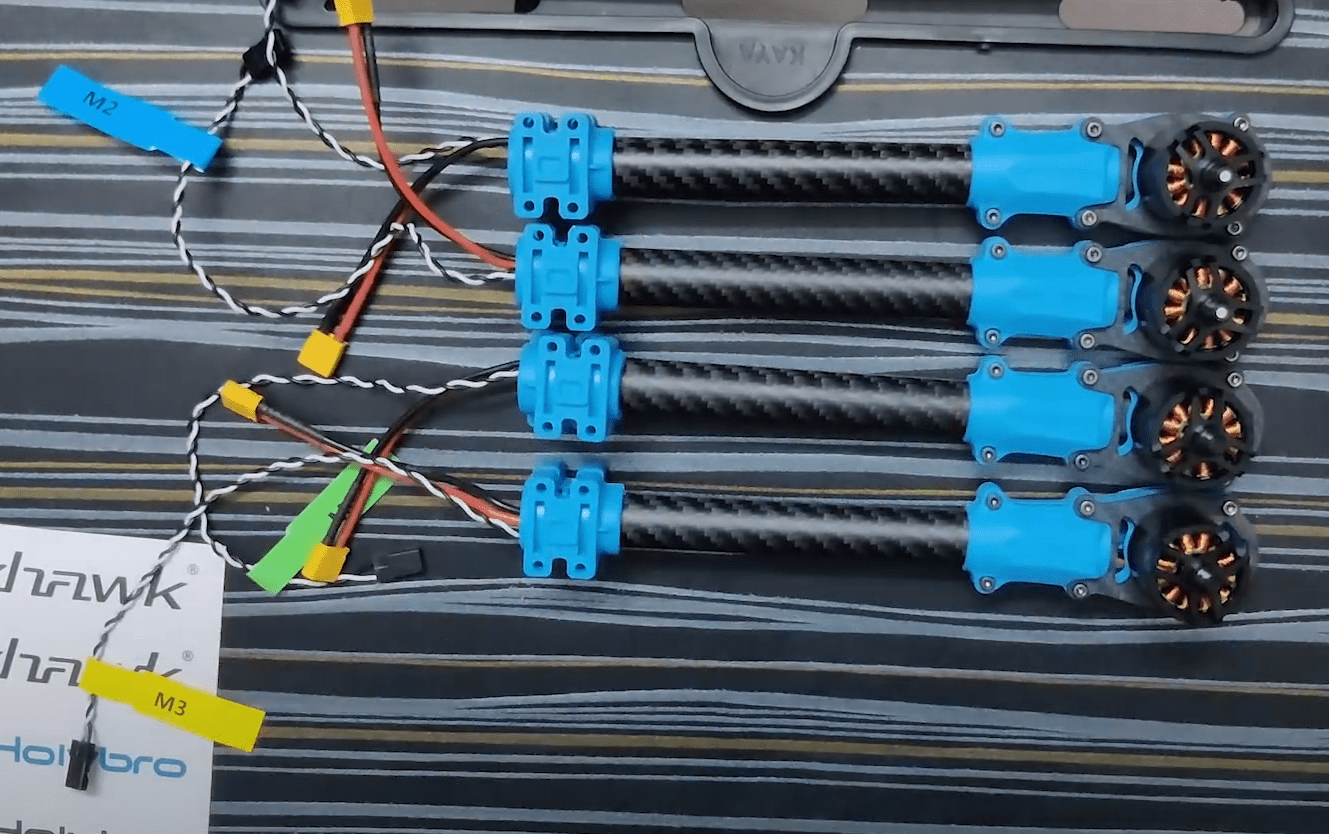
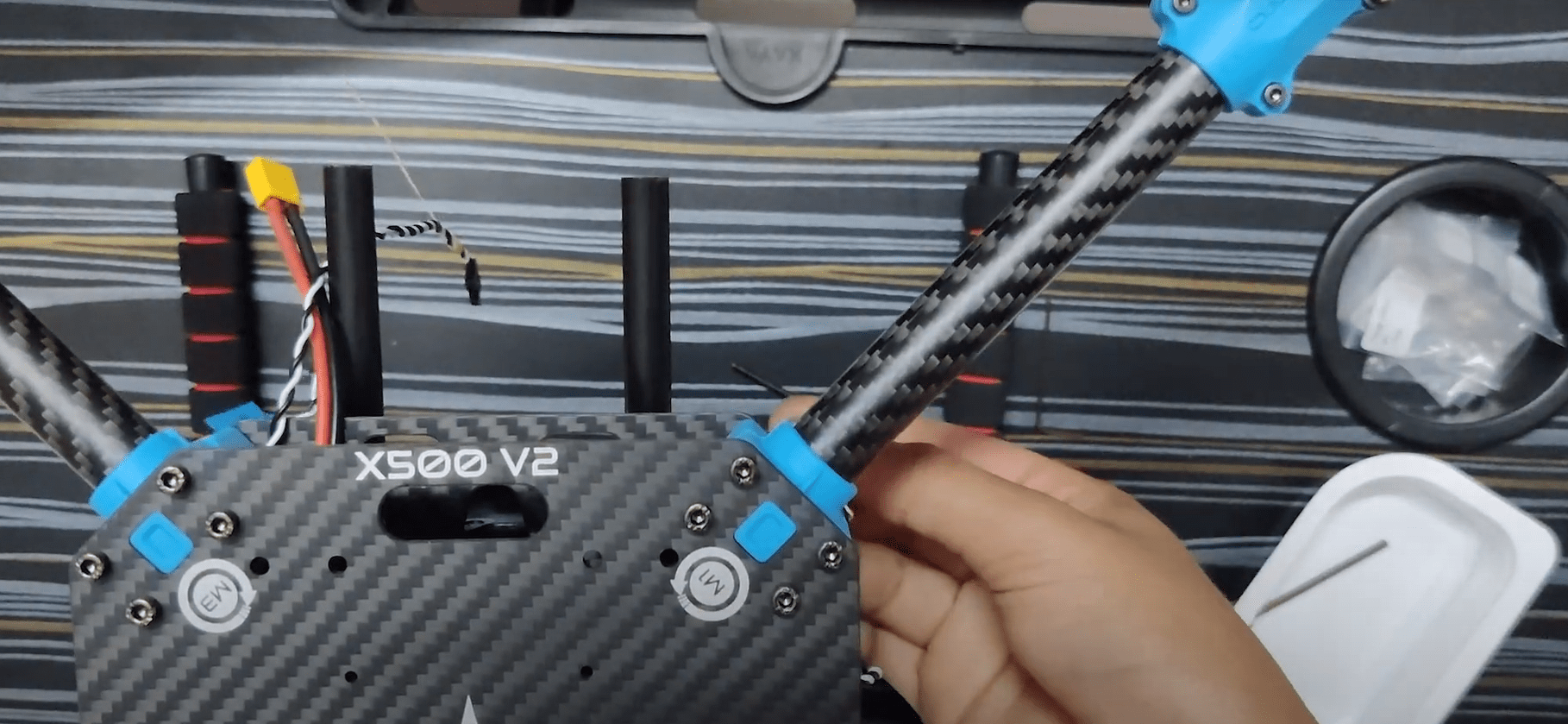
武器
螺钉 内六角螺钉 M3*38 16pcs | 法兰防松螺母 M3 16pcs
由于电机是预先组装好的,因此安装支臂非常简单。
- 确保有正确编号的机械臂,其电机位于相应一侧。

TIP
使用内六角扳手/任何细长物品,将其插入要紧固的螺栓的反面。
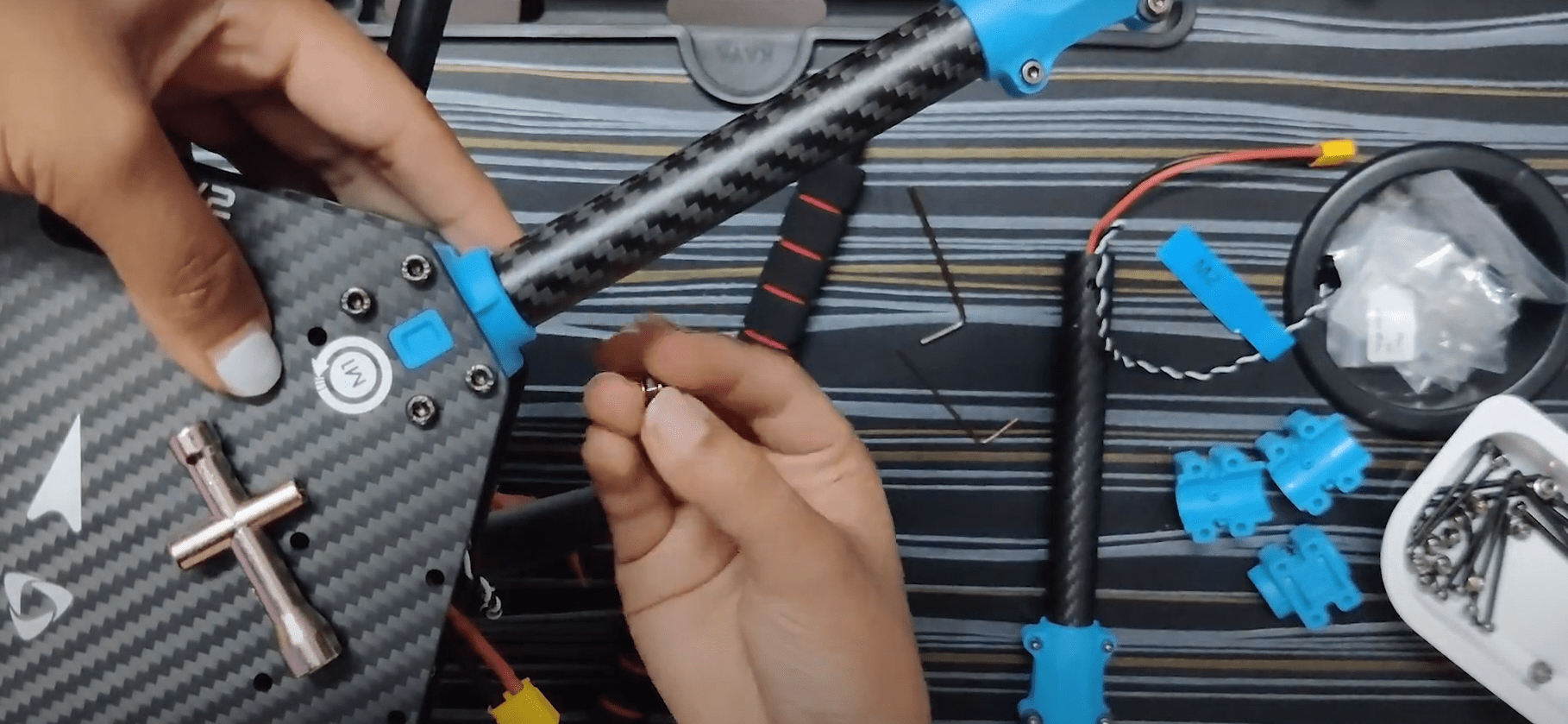
取一只手臂,将矩形挤压件插入底板上的矩形空心内。
在将顶板插入顶板的同时,必须使用 M3*38 内六角螺钉和 M3 法兰锁紧螺母拧紧 3 个组件(底板、顶板和amp;臂)。
用显影套件中提供的微型十字扳手夹住一侧。
在 3 个电机全部就位之前,不要拧紧任何螺丝,因为这可能会在组装第 3 和第 4 个电机时造成困难。

推进器
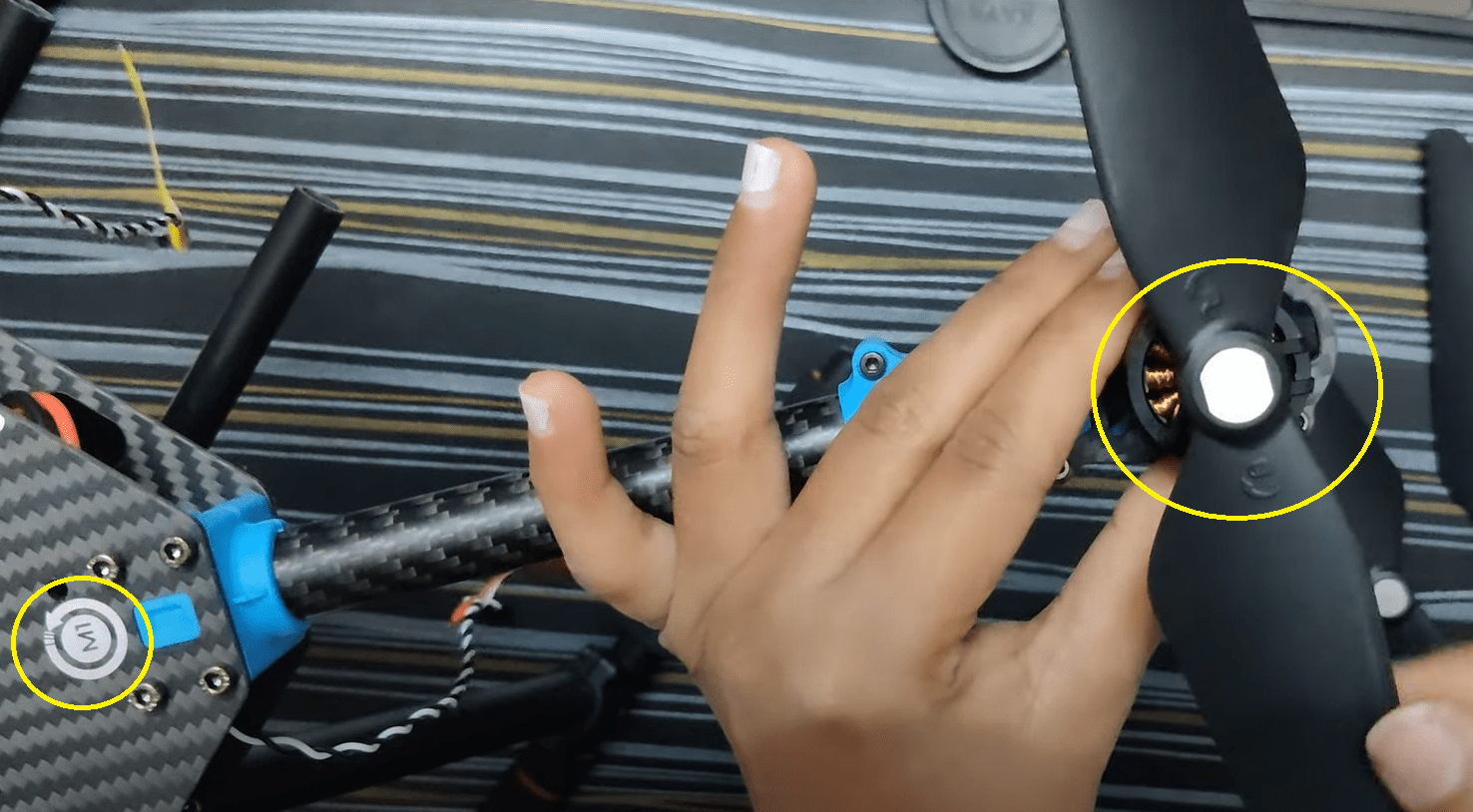
- 底板指示电机的方向。
- 带有白色/银色涂层的螺旋桨与带有类似涂层的电机配套使用。
- 螺旋桨的解锁和锁定指示在螺旋桨上。
- 使用 4 个螺旋桨并将它们安装到电机上,同时牢记上述 3 点。
以下部件可按常规放置。
全球定位系统
螺钉 锁紧螺母 M3 4 个 | 螺钉 M3*10 4 个
按照视频组装 GPS。
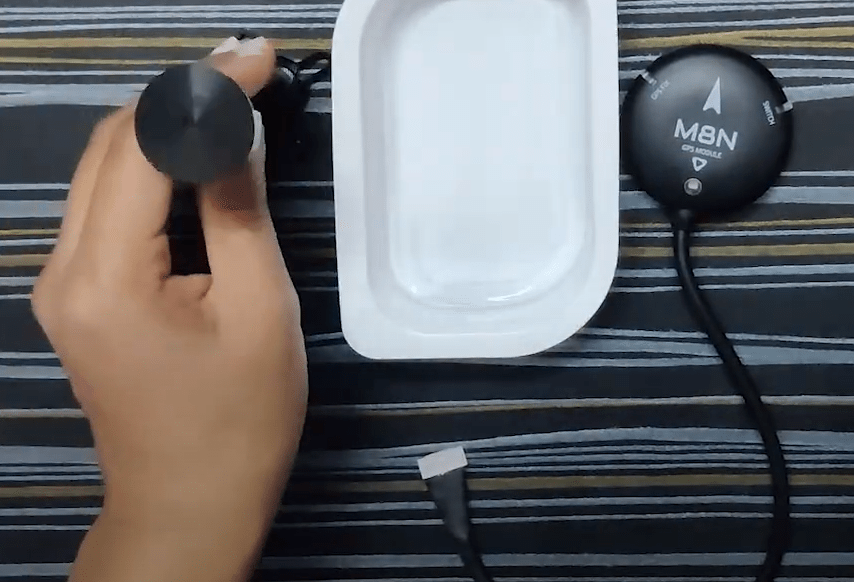
本指南使用 Holybro 指南中建议的 GPS 安装位置。
使用锁紧螺母 M3 & 和螺钉 M3*10 将 GPS 固定架的底端拧在有效载荷支架一侧。
Pixhawk 6C
- PM02 的导线连接至 Pixhawk 中的 POWER1
- 遥测转至 TELEM1
- GPS 转 GPS1
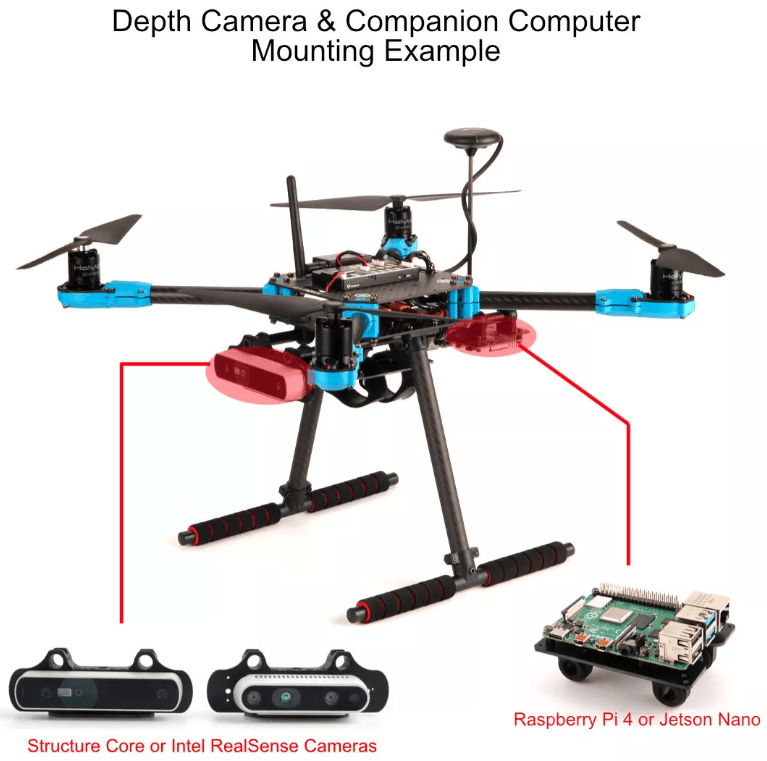
配套计算机(可选)
螺钉 内六角螺钉 M2.512 4 个 | 尼龙支座 M2.55 4 个 M2.5 锁紧螺母 4 个
X500 套件提供了放置配套电脑的空间,如 Raspberry Pi 或 Jetson nano [待定]。
- 插入 4 个 M2.5*12 的内六角螺钉,并将支座固定在上面。
- 现在放置配套计算机,并使用 M2.5 锁紧螺母将其组装起来
照相机
- 可使用深度摄像头支架安装英特尔 Realsense 深度/跟踪摄像头或 Structure Core 等摄像头。
- 只需将支架插入两根杆内,然后根据所使用的相机使用相应的螺丝即可。
安装/配置 PX4
TIP
有关安装和配置 PX4 的完整说明,请参见 基本配置.
QGroundControl 用于安装 PX4 自动驾驶仪并为 X500 机架进行配置/调整。 下载并安装 QGroundControl 您的平台。
首先更新固件、机身和致动器映射:
您需要选择 圣溪 X500 V2 机身Quadrotor x > Holybro 500 V2)
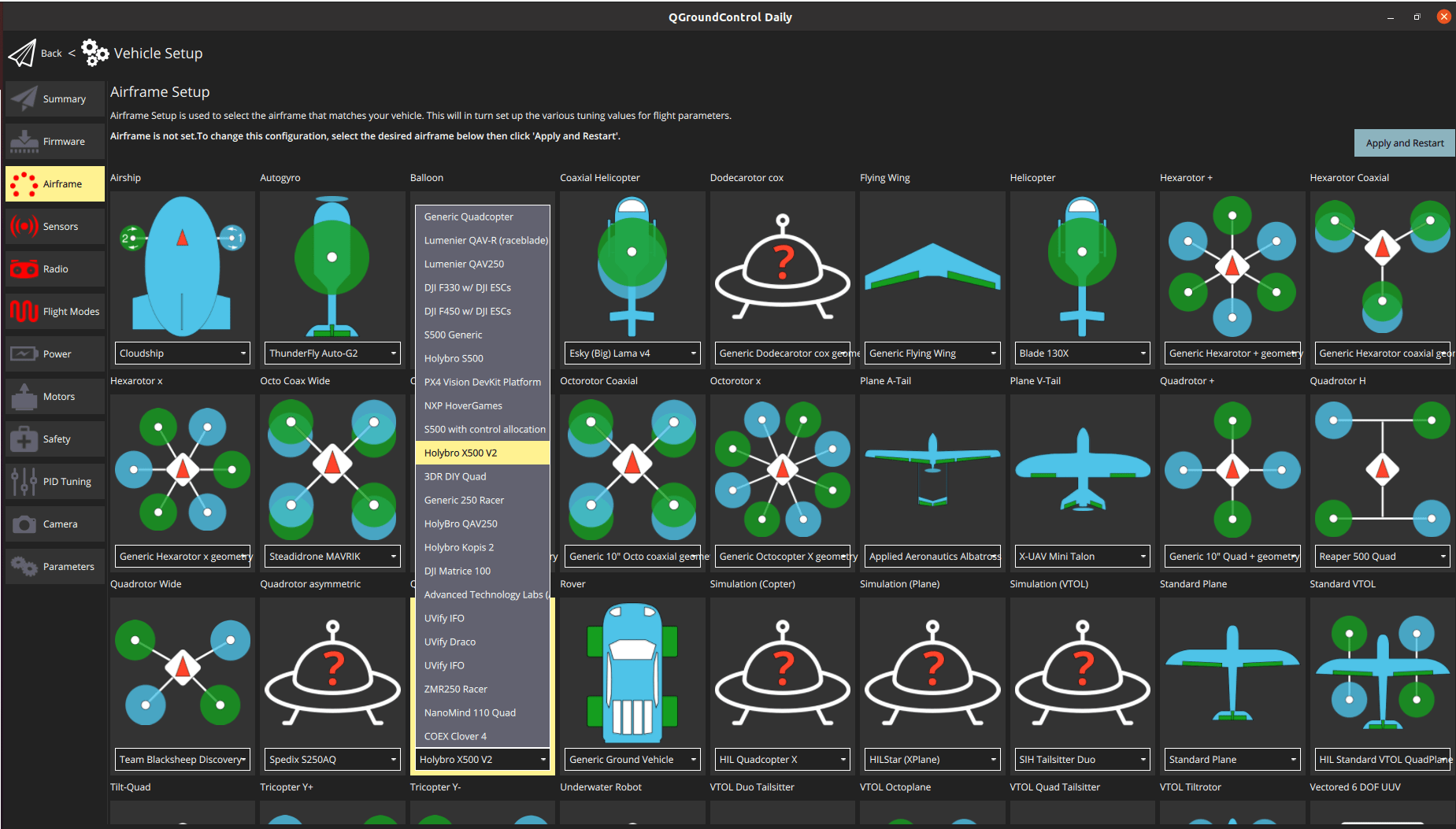
- 您应该不需要更新飞行器的几何形状(因为这是一个预配置机身)。
- 为输出端分配执行器功能,以匹配您的布线。机身上的电机已预先配置在 FMU PWM 输出.
- 使用滑块测试配置。
然后执行必要的设置/校准:
理想情况下,你也应该这样做:
调音
机身选择套件 默认 机架的自动驾驶参数。这些参数足以满足飞行需要,但最好还是针对特定的机架结构调整参数。
有关如何操作的说明,请从 自动调整.
致谢
本构建日志由 Akshata 和 Hamish Willee 撰写,非常感谢 Holybro 和 Dronecode 提供的硬件和技术支持。