基本概念
本专题提供了无人机和 PX4 使用的基本介绍(主要针对新手用户,但对更有经验的用户也是一个很好的入门)。
如果您已经熟悉了基本概念,就可以继续学习 基本装配 了解如何为特定自动驾驶仪硬件布线。要加载固件并设置载具,请使用 QGroundControl见 基本配置.
什么是无人机?
无人机或无人驾驶飞行器(UV)是一种可手动或自主控制的无人驾驶机器人飞行器。它们可以在空中、地面、水上/水下飞行,可用于以下多种用途 消费、工业、政府和军事应用包括航拍/摄像、运载货物、竞赛、搜索和测量等。
无人机更正式的名称是无人机(UAV)、无人地面飞行器(UGV)、无人水面飞行器(USV)和无人水下飞行器(UUV)。
信息
术语无人机系统(UAS)通常是指无人机和一个完整系统的所有其他组件,包括地面控制站和/或无线电控制器,以及用于控制无人机、捕获和处理数据的任何其他系统。
无人机类型
有许多不同的载具框架(类型),而在这些类型中又有许多变化。下面列出了其中一些类型及其最适合的使用情况。
- 多旋翼飞行器 - 多旋翼飞行器可以实现精确悬停和垂直起飞,但飞行时间较短,速度一般也较慢。多旋翼飞行器是最受欢迎的飞行器类型,部分原因是它们易于组装,而 PX4 的模式使其易于飞行,非常适合作为相机平台。
- 直升机 - 直升机的优点与多旋翼直升机相似,但机械结构更复杂,效率更高。它们也更难驾驶。
- 飞机(固定翼) - 固定翼飞行器比多旋翼飞行器飞行时间更长、速度更快,因此在地面勘测等方面的覆盖范围更大。不过,固定翼飞行器比多旋翼飞行器更难飞行和着陆,如果需要悬停或飞行速度很慢(如测量垂直结构),则不适合使用固定翼飞行器。
- VTOL (垂直起降)--固定翼/多旋翼混合飞行器提供了两个世界的最佳选择:像多旋翼飞机一样垂直起飞和悬停,但又像飞机一样过渡到向前飞行,以覆盖更多地面。VTOL 通常比多旋翼飞机和固定翼飞机更昂贵,也更难制造和调整。它们有多种类型:倾转旋翼机、尾翼机、四旋翼机等。
- 飞艇/气球 - 轻于空气的飞行器,通常可提供高空长航时飞行,但代价往往是对飞行速度和方向的控制有限(或根本无法控制)。
- UGV无人车 - 类似汽车的地面交通工具。它们易于控制,使用起来往往很有趣。它们的飞行速度不如大多数飞机,但可以运载更重的有效载荷,而且静止时不消耗太多动力。
- 船只 - 水上交通工具。
- 潜水器 - 水下航行器。
欲了解更多信息,请参阅
自动驾驶仪
无人机的 "大脑 "被称为自动驾驶仪。
最低限度包括 飞行算法池 上运行的实时操作系统("RTOS")软件。 飞行控制器 (FC) 硬件。飞行算法池提供基本的稳定和安全功能,通常还为手动飞行和自动执行起飞、着陆和执行预定任务等常见任务提供一定程度的驾驶仪辅助。
一些自动驾驶仪还包括一个通用计算系统,可提供更高级别的指挥和控制,并可支持更先进的网络、计算机视觉和其他功能。这可以作为一个单独的 配套电脑但在未来,它越来越有可能成为一个完全集成的组件。
PX4 飞行算法池
PX4 是功能强大的开源自动驾驶仪 飞行算法池 在 NuttX 实时操作系统上运行。
PX4' 的一些主要功能包括
- 支持多种不同的载具框架/类型,包括 多旋翼机, 固定翼飞机 (飞机)、 VTOLs (多旋翼/固定翼混合飞行器)、 地面载具和 水下航行器.
- 无人机组件的最佳选择 飞行控制器, 传感器, 载荷以及其他外围设备。
- 灵活而强大 飞行模式 和 安全功能.
- 与 配套计算机 和 机器人应用程序接口 例如 ROS 2 和 MAVSDK).
PX4 是更广泛的无人机平台的核心部分,该平台包括 QGroundControl 地面站、 Pixhawk 硬件和 MAVSDK PX4 可与配套电脑、相机和其他使用 MAVLink 协议的硬件集成。PX4 由 Dronecode 项目.
地面控制站
地面控制站 (GCS) 是基于地面的系统,可让无人机操作员监视和控制无人机及其有效载荷。下面列出了已知可与 PX4 协同工作的部分产品。
QGroundControl
Dronecode GCS 软件名为 QGroundControl (QGC")。它可在 Windows、Android、MacOS 或 Linux 硬件上运行,支持多种屏幕外形尺寸。您可以从以下网址免费下载 这里.
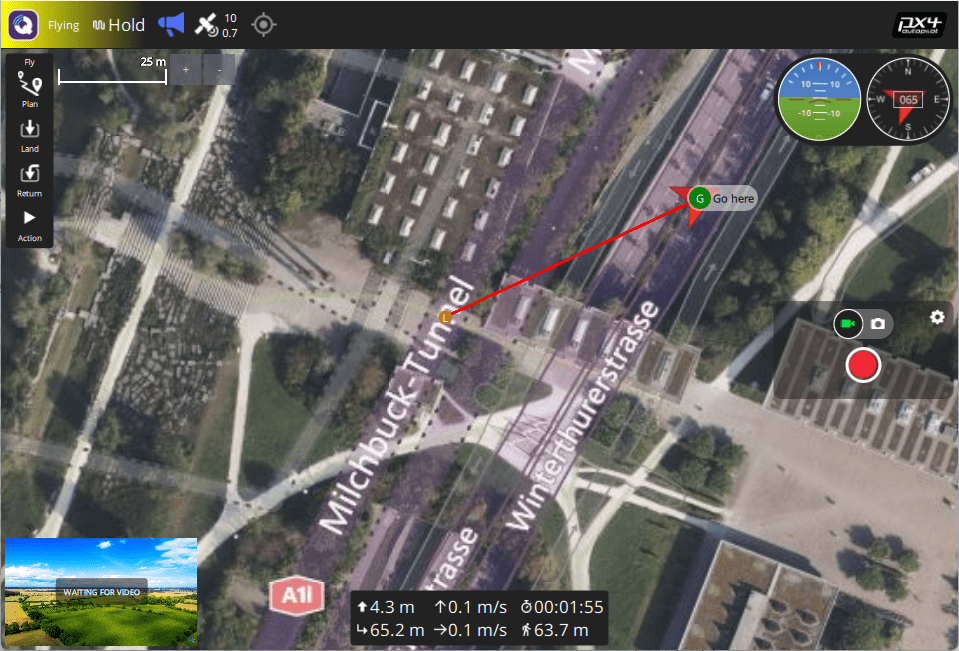
QGroundControl 通过遥测无线电(双向数据链路)与无人机通信,让您可以获得实时飞行和安全信息,并通过点击界面控制飞行器、摄像头和其他有效载荷。在支持这些功能的硬件上,您还可以使用操纵杆控制器手动驾驶飞行器。QGC 还可用于可视化规划、执行和监控自主任务,设置地理围栏等。
QGroundControl 桌面版还可用于在无人机自动驾驶仪/飞行控制器硬件上安装(闪存)PX4 固件和配置 PX4。
Auterion 飞行任务控制中心 (AMC)
Auterion 飞行任务控制中心 这是一款功能强大、功能齐全的地面控制站应用程序,针对以下应用进行了优化 驾驶仪 而不是载具配置。虽然设计用于 Auterion 产品,但也可用于 PX4。
欲了解更多信息,请参阅
无人机组件及零件
飞行控制器
飞行控制器(FC)是加载和运行 PX4 飞行算法池固件的硬件。它们与传感器相连,PX4 通过传感器确定自身状态,并与执行器/电机相连,执行器/电机用于稳定和移动飞行器。

PX4 可在多种不同类型的设备上运行 飞行控制器硬件从 Pixhawk 系列 控制器到 Linux 计算机。其中包括 Pixhawk 标准 和 制造商支持 滑板。您应该根据载具的实际限制、您希望进行的活动和成本选择合适的滑板。
欲了解更多信息,请参阅 选择飞行控制器
传感器
PX4 利用传感器确定飞行器状态,以稳定飞行器并实现自主控制。飞行器状态包括:位置/高度、航向、速度、空速、方向(姿态)、不同轴的旋转速率、电池电量等。
PX4 最低要求 a 陀螺仪, 加速计, 磁强计 (指南针)和 气压表.A 全球导航卫星系统/全球定位系统 要启用所有自动模式和某些手动/辅助模式,就必须使用全球定位器或其他全球定位源。固定翼和 VTOL 飞行器还应包括一个 空速传感器 (强烈推荐)。
最小传感器集被纳入 Pixhawk 系列 飞行控制器(也可用于其他控制器平台)。控制器还可连接其他/外部传感器。
欲了解更多信息,请参阅 传感器硬件 & 设置
输出:电机、伺服、执行器
PX4 的用途 产出 来控制:电机速度(例如通过 ESC)、副翼和襟翼等飞行表面、相机触发器、降落伞、夹具以及许多其他类型的有效载荷。
输出可以是 PWM 端口或 DroneCAN 节点(例如 DroneCAN 电机控制器).下面的图片显示了以下 PWM 输出端口 Pixhawk 4 和 Pixhawk 4 mini.
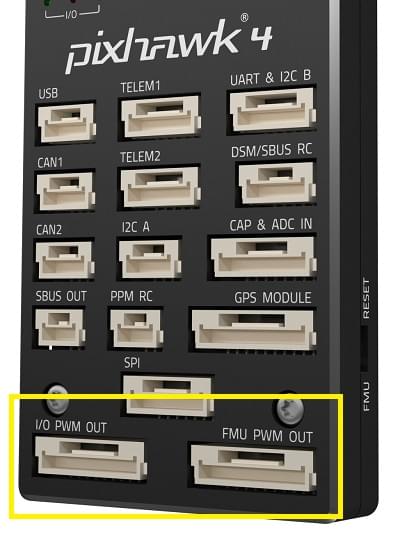

输出分为 MAIN 和 辅助 输出,并单独编号(即 MAINn 和 AUXn其中 n 从 1 到通常的 6 或 8)。它们也可以标记为 IO PWM 输出 和 FMU PWM 输出 (或类似)。
警告
飞行控制器可能只有 MAIN PWM 输出(如 Pixhawk 4 Mini),或者可能只有 6 个输出,要么是 MAIN 或 辅助.确保您选择的控制器有足够的端口/输出,以满足您的需要。 机身.
通过将 QGroundControl 中的相关功能("电机 1")分配给所需的输出("AUX1"),您几乎可以将任何输出连接到任何电机或其他执行器: 致动器配置和测试.请注意,每个帧的功能(电机和控制面执行器的位置)在 机身参考.
备注
- Pixhawk 控制器配有 FMU 板和 可以 有单独的 IO 板。如果有 IO 板,则
辅助端口直接连接到 FMU 和MAIN端口连接到 IO 板。否则MAIN端口连接到 FMU,并且没有辅助端口。 - FMU 输出端口可以使用 Dshot 或 单发 这些协议(以及 PWM)可提供更低的延迟性能。这对于需要更高性能的竞赛和其他飞行器来说非常有用。
- 只有 6-8 个输出
MAIN和辅助因为大多数飞行控制器只有这么多 PWM/Dshot/Oneshot 输出。理论上,如果总线支持,还可以有更多的输出(例如,UAVCAN 总线并不局限于这么几个节点)。
电调和电机
许多 PX4 无人机使用由飞行控制器通过电子调速器(ESC)驱动的无刷电机(ESC 将飞行控制器发出的信号转换成适当的功率水平输送给电机)。
有关 PX4 支持哪些电调/电机的信息,请参阅:
电池/电源
PX4 无人机通常使用锂聚合物(LiPo)电池供电。电池通常使用一个 电源模块 或 电源管理板它们为飞行控制器和电调(电机)提供单独的电源。
有关电池和电池配置的信息,请参阅 电池估计调整 和 基本装配 例如 Pixhawk 4 接线快速入门 > 电源).
手动控制
驾驶员可以使用一个 无线电遥控 (RC) 系统 或 操纵杆/游戏板 通过 QGroundControl 连接的控制器。


遥控系统使用专用的地面无线电发射器和车载接收器发送控制信息。在首次调整/测试新框架设计时,或在驾驶竞赛/进行杂技表演时(以及在低延迟非常重要的其他情况下),应始终使用它们。
操纵杆系统使用 QGroundControl 将计算机游戏操纵杆的控制信息编码为 MAVLink 信息,并使用(共享)遥测无线电信道将其发送至飞行器。只要您的遥测信道具有足够高的带宽/低延迟,它们就可用于大多数手动飞行使用情况,如起飞、调查等。
操纵杆通常用于集成式地面控制系统/手动控制系统,因为集成操纵杆比集成单独的无线电系统更便宜、更容易,而且对于大多数使用情况来说,较低的延迟并不重要。它们也非常适合 PX4 模拟器飞行,因为您可以将其直接插入地面控制计算机。
信息
PX4 没有 要求 自主飞行模式的手动控制系统。
安全开关
载具可包括 安全开关 载具在行驶前必须启动 上膛 (上膛时,电机有动力,螺旋桨可以转动)。
这种开关几乎总是集成在 全球定位系统 模块,该模块与 Pixhawk GPS1 端口 - 以及 蜂鸣器 和 UI LED.
默认情况下开关可能被禁用,但这取决于特定的飞行控制器和机身配置。您可以使用 CBRK_IO_SAFETY 参数。
信息
安全开关为可选项。许多人认为,对于用户来说,更安全的做法是永远不要接近带电系统,即使是为了启用/禁用这种联锁。
蜂鸣器
飞行器通常配有蜂鸣器,用于发出飞行器状态和飞行准备就绪的声音通知(见 曲调含义).
这种蜂鸣器几乎总是集成在 全球定位系统 模块,该模块与 Pixhawk GPS1 端口 - 以及 安全开关 和 UI LED.您可以使用参数 CBRK_BUZZER.
发光二极管
载具应配备超亮 UI RGB LED 表示当前的飞行准备状态。
历史上,飞行控制器电路板中就包含了这一功能。在较新的飞行控制器上,这几乎总是一个 I2C 外围设备 纳入 全球定位系统 模块,该模块与 Pixhawk GPS1 端口 - 以及 安全开关 和 蜂鸣器.
数据/遥测无线电
数据/遥测无线电 可在地面控制站之间提供无线 MAVLink 连接,如 QGroundControl 和运行 PX4 的飞行器。这样就可以在飞行器飞行时调整参数、实时检查遥测数据、临时更改任务等。
机载/辅助计算机
A 伴侣电脑 (也称为 "任务计算机 "或 "车载计算机"),是一个独立的车载计算机,可与 PX4 通信,提供更高级别的指挥和控制。
配套计算机通常运行 Linux,因为这是一个更好的通用软件开发平台,无人机可以利用已有的计算机视觉、网络等软件。
飞行控制器和配套计算机可以预先集成到一个底板中,从而简化硬件开发;也可以分开,并通过串行电缆、以太网电缆或 wifi 连接。配套计算机通常使用高级机器人应用程序接口与 PX4 通信,例如 MAVSDK 或 ROS 2.
相关主题包括
SD 卡(可移动存储器)
PX4 使用 SD 存储卡存储 飞行日志还需要它们才能使用 UAVCAN 外围设备和飞行 任务.
默认情况下,如果没有 SD 卡,PX4 将播放 格式化失败(2 声) 在启动过程中调整两次(将无法使用上述任何功能)。
TIP
Pixhawk 板支持的 SD 卡最大容量为 32GB。最大 闪迪至尊 U3 32GB 和 三星 EVO Plus 32 是 强烈推荐.
SD 卡绝对是可选项。不包括 SD 卡插槽的飞行控制器可以:
- 通过参数 CBRK_BUZZER.
- 溪流日志 到另一个组件(同伴)。
- 在 RAM/FLASH 中存储任务。
有效载荷
有效载荷是运载火箭为实现用户或任务目标而携带的设备,如勘测任务中的照相机、用于检查的仪器(如辐射探测器)以及需要运送的货物。PX4 支持多种相机和多种有效载荷。
有效载荷连接到 战斗控制器输出可在任务中自动触发,也可通过遥控控制器或操纵杆或地面站(通过 MAVLink/MAVSDK 命令)手动触发。
欲了解更多信息,请参阅 有效载荷和摄像头
上膛和撤膛
载具被称为 上膛 当所有电机和执行器都通电时,以及 撤膛 当无电源时。还有一个 预上膛 只有执行器通电时的状态。
警告
上膛载具可能很危险,因为推进器会旋转。
默认情况下(在模式 2 发射机上),按住遥控装置上的油门/偏航杆即可触发上膛。 右下 一秒钟(要解除上膛,请按住左下方的摇杆)。也可以通过遥控开关或按钮对 PX4 进行上膛配置(也可以从地面站发送 MAVLink 上膛命令)。
为减少事故,载具在地面上时应尽量少上膛。默认情况下,载具
- 解除上膛 或 预先警报 (在不使用时(电机无动力),必须明确说明 上膛 然后才起飞。
- 如果载具在上膛后没有迅速起飞,则自动解除/重新上膛(解除时间可配置)。
- 着陆后不久自动解除/重新上膛(时间可配置)。
- 如果载具未处于健康状态,则无法启动。
- 如果载具上有 安全开关 未参与。
- 如果 VTOL 飞行器处于固定翼模式 (默认情况下).
预设警戒时仍可使用执行器,而解除警报时则会解除所有动力。预解除警报和解除警报都应该是安全的,特定的载具可以支持预解除警报或解除警报。
TIP
有时载具无法上膛的原因并不明显。QGC v4.2.0(撰写本报告时的每日版本)及以后的版本会在以下文件中提供上膛检查报告 飞行视图> 上膛和飞行前检查.从 PX4 v1.14 版开始,提供有关上膛问题的全面信息以及可能的解决方案。
有关上膛和撤膛配置的详细介绍,请点击此处: 预上膛、上膛、撤膛配置.
飞行模式
飞行模式可为用户(驾驶仪)提供不同类型/级别的载具自动化和自动驾驶辅助。 自主模式 完全由自动驾驶仪控制,无需驾驶仪/遥控器输入。例如,这些模式用于自动执行起飞、返回原点和着陆等常见任务。其他自主模式可执行预先编程的任务、跟踪 GPS 信标或接受机载计算机或地面站的指令。
手动模式 用户(通过遥控杆/操纵杆)在自动驾驶仪的辅助下进行控制。不同的手动模式可实现不同的飞行特性--例如,有些模式可实现杂技表演,而有些模式则无法翻转,并能逆风保持位置/航向。
TIP
并非所有飞行模式都适用于所有类型的飞行器,有些模式只有在满足特定条件时才能使用(例如,许多模式需要全局位置估计)。
每种飞行器的可用飞行模式概览如下:
有关如何设置遥控器开关以启用不同飞行模式的说明,请参阅《飞行指南》。 飞行模式配置.
安全设置(故障安全)
PX4 具有可配置的故障安全系统,可在出现故障时保护和恢复飞行器!这些系统允许您指定可以安全飞行的区域和条件,以及触发故障安全时将执行的操作(例如着陆、保持位置或返回指定点)。
信息
您只能为 第一次 故障安全事件。一旦发生故障安全事件,系统将输入特殊的处理代码,以便后续的故障安全触发由单独的系统级代码和载具专用代码进行管理。
主要故障安全区域如下:
- 电池电量不足
- 遥控 (RC) 损失
- 位置丢失(全局位置估计质量太低)。
- 机外损失(例如与配套计算机失去连接)
- 数据链路丢失(例如,与全球监控系统的遥测连接丢失)。
- 突破地理围栏(限制载具在虚拟圆柱体内飞行)。
- 任务故障保护(防止在新的起飞地点执行之前的任务)。
- 交通规避(由 ADSB 等应答器数据触发)。
欲了解更多信息,请参阅 安全 (基本配置)。
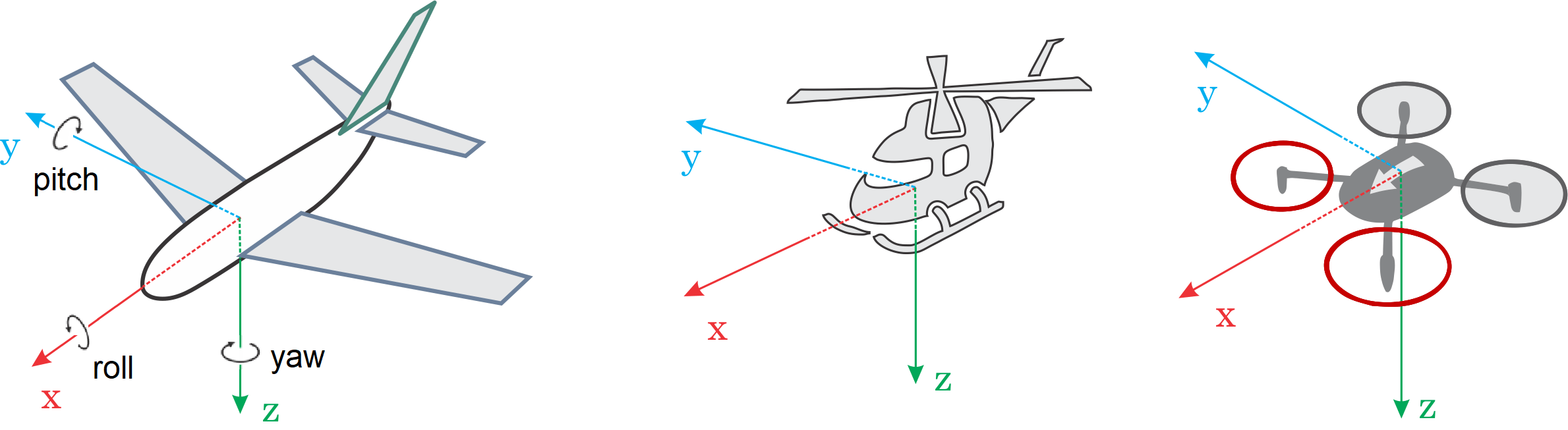
标题和方向
所有载具、船只和飞机都有一个航向,或根据其前进运动确定一个方向。
信息
对于 VTOL 尾翼飞行器来说,航向是相对于多旋翼飞行器配置而言的(即飞行器在起飞、悬停和着陆时的姿态)。
必须知道飞行器的航向,以便使自动驾驶仪与飞行器的运动矢量保持一致。多旋翼飞行器即使四面对称也有航向!通常,制造商会使用彩色道具或彩色臂来指示航向。
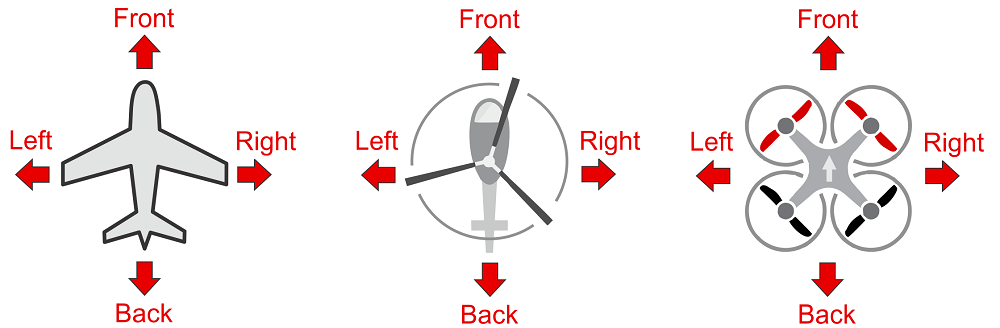
在插图中,我们将用红色来表示多旋翼飞行器前螺旋桨的航向。
您可以在 飞行控制器定向