加载固件
QGroundControl 桌面 版本可用于将 PX4 固件安装到 Pixhawk 系列 飞行控制器板。
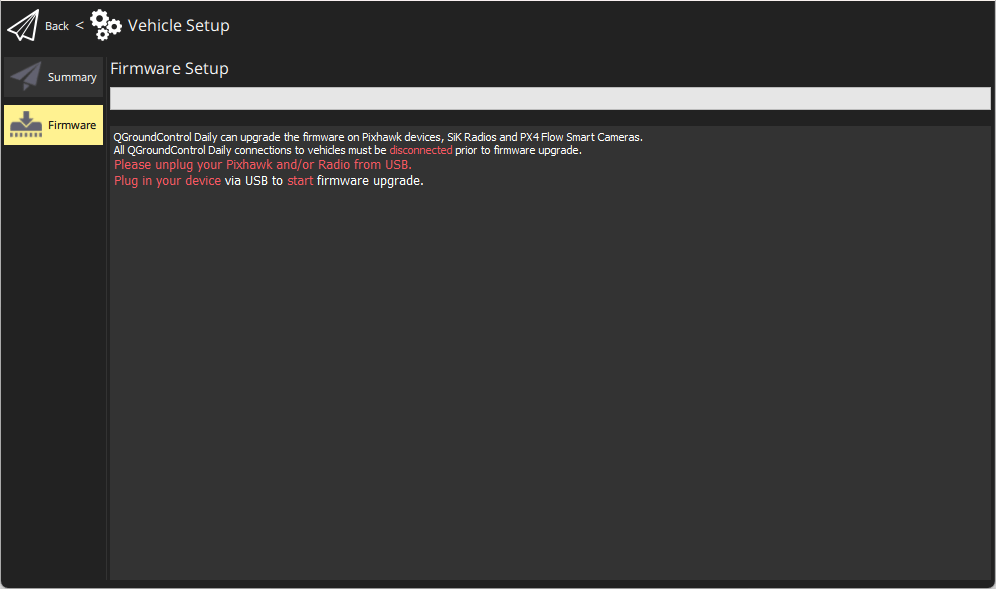
警告
开始安装固件之前 与载具的所有 USB 连接必须 断线 (直接或通过遥测无线电)。载具必须 没有 由电池供电。
安装稳定的 PX4
一般来说,您应该使用最新的 释放 版本的 PX4,以便从错误修复中受益,并获得最新、最强大的功能。
TIP
这是默认安装的版本。
安装 PX4:
开始 QGroundControl 并连接载具。
选择 Q" 图标 > 载具设置 > 固件 (侧边栏)打开 固件设置.
通过 USB 将飞行控制器直接连接到电脑。
信息
直接连接到机器上的供电 USB 端口(不要通过 USB 集线器连接)。
选择 PX4 Pro 稳定版 vX.x.x 选项来安装 PX4 的最新稳定版本 飞行控制器 (自动检测到)。
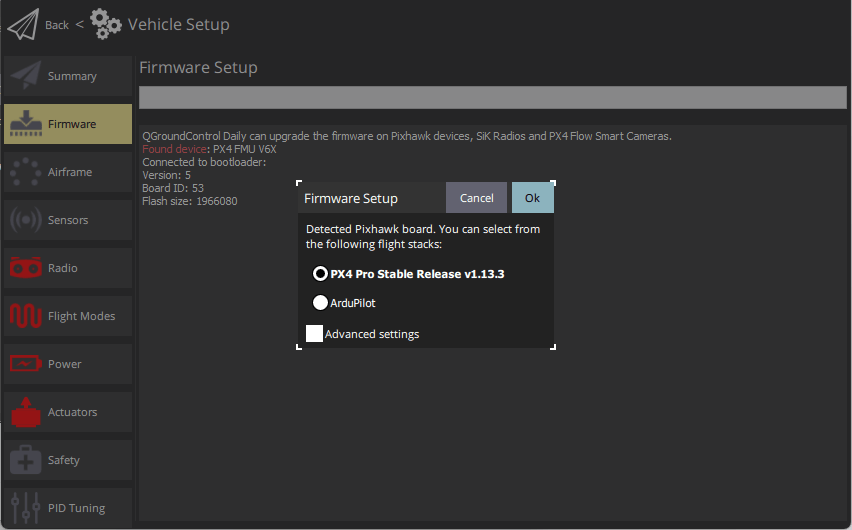
点击 好的 按钮开始更新。
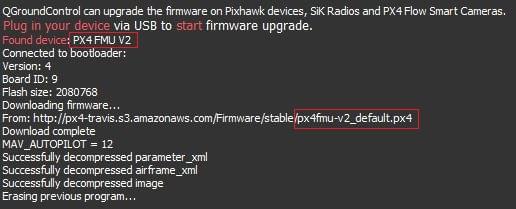
然后,固件将进行一系列升级步骤(下载新固件、清除旧固件等)。每个步骤都会打印到屏幕上,整体进度会显示在进度条上。
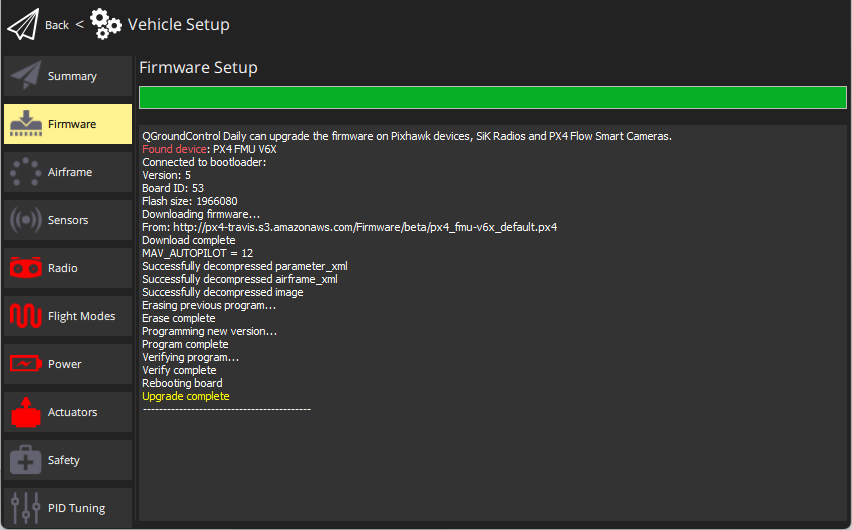
固件加载完成后,设备/载具将重新启动并重新连接。
TIP
如果 QGroundControl 安装了 FMUv2 目标机(请参阅安装过程中的控制台),并且您使用的是较新的电路板,您可能需要 更新引导程序 以访问飞行控制器上的所有内存。
接下来,您需要指定 车架 (然后是传感器、无线电等)。
安装 PX4 主固件、测试版固件或定制固件
安装不同版本的 PX4:
- 按上述步骤连接载具,然后选择 PX4 Pro 稳定版 vX.x.x.
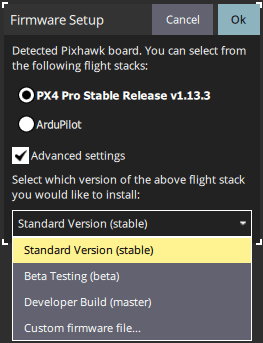
- 检查 高级设置 并从下拉列表中选择版本:
- 标准版本(稳定): 默认版本(即无需使用高级设置即可安装!)。
- Beta 测试(测试版): 测试版/候选版。仅在准备发布新版本时可用。
- 开发人员版本(主版本): PX4/PX4-Autopilot 的最新版本 主要 分支。
- 自定义固件文件.....: 自定义固件文件(例如 您在本地创建的).如果选择此选项,则必须在下一步中从文件系统中选择自定义固件。
然后继续进行固件更新。
启动程序更新
Pixhawk 硬件通常预装了适当版本的引导加载程序。
安装 FMUv2 固件的较新 Pixhawk 板可能需要更新。如果 QGroundControl 如果您安装了 FMUv2 目标机(请参阅安装过程中的控制台),并且使用的是较新的板,则可能需要更新引导加载程序,以便访问飞行控制器上的所有内存。
您可以按照 引导程序更新 > FMUv2 引导程序更新.
更多信息
- QGroundControl 用户指南 > 固件.
- PX4 安装视频 (Youtube)