萨波格电调固件
萨波格 固件是一款先进的开源无传感器 PMSM/BLDC 电机控制器固件,设计用于电动无人车的推进系统。
虽然它可以使用传统的 PWM 输入进行控制,但其设计目的是通过 CAN 总线运行,使用 DroneCAN.
购买地点
有多家供应商销售运行 sapog 固件的电调硬件:


硬件设置
电调使用 Pixhawk 标准 4 针 JST GH 电缆连接至 CAN 总线。有关详细信息,请参阅 CAN 接线 说明。ESC 顺序并不重要。
固件设置
电调已安装现有的 Sapog 版本。如果您想更新
构建固件:
Git 复制 --递归 https://github.com/PX4/sapog
CD SAPOG/固件
生产 释放=1这将创建一个文件 *.application.bin在 建立/.可通过 sapog 引导加载程序在 DroneCAN 上通过自动驾驶仪刷新该二进制文件。参见 DroneCAN 固件更新.
参考 项目页面 了解更多信息,包括如何在不使用 DroneCAN 引导加载程序的情况下进行闪存(即在尚未编程的设备上)或用于开发。
飞行控制器设置
启用 DroneCAN
将电调连接至 Pixhawk CAN 总线。使用电池或电源为整个飞行器供电(而不仅仅是通过 USB 为飞行控制器供电),并通过设置参数启用 DroneCAN 驱动程序 UAVCAN_ENABLE 到 '3',以启用动态节点 ID 分配和 DroneCAN ESC 输出。
使用 QGroundControl 自动枚举电调
本节将介绍如何枚举任何 基于 Sapog-基于电调的 "自动"使用 QGroundControl.
TIP
如果设置中只有一个 ESC,则可以跳过本节,因为默认情况下 ESC 索引已设置为零。
枚举 ESC:
用蓄电池为载具供电并连接 QGroundControl
导航至 载具设置 > 电源 在 QGC 中。
通过按下 开始任务 按钮,如下图所示。
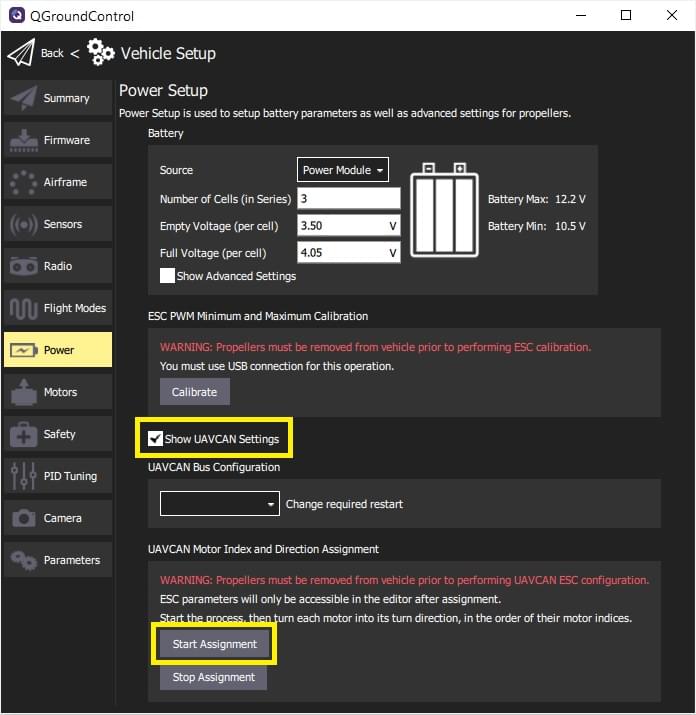
您将听到一声提示音,表明飞行控制器已进入 ESC 枚举模式。
按照正确的旋转方向手动旋转每个电机(如图 5 所示)。 机身参考) ,从第一个电机开始,到最后一个电机结束。每转动一个电机,都会听到一声确认哔声。
信息
确保以正确的方向转动每个电机,因为电调会自动学习并记住方向(即正常运行时顺时针旋转的电机在枚举时也必须顺时针旋转)。
在枚举完最后一个电机后,确认音应改变,以表示枚举程序已完成。
重新启动 PX4 和 Sapog ESC 以应用新的枚举标识。
下面的视频演示了这一过程:
使用 Sapog 手动进行 ESC 枚举
TIP
我们建议自动 使用 QGroundControl 对 Sapog ESC 进行枚举 而不是手动枚举(因为手动枚举更简单、更安全)。
您可以使用 DroneCAN GUI 工具.这将为每个枚举的 ESC 分配以下 Sapog 配置参数:
esc_indexctl_dir
信息
参见 Sapog 参考手册 了解有关参数的更多信息。
PX4 配置
使用 Acutator 配置屏幕。
故障排除
更多信息
- PX4/Sapog (Github)
- Sapog v2 参考手册
- 在 PX4 上使用基于 Sapog 的电调 (Zubax KB)