包裹投递任务
通过包裹投递任务,用户可以使用一个 夹具.
信息
此功能在 PX4 v1.14 中添加,仅支持抓取器。今后,包裹运送任务将扩展到支持其他货物释放硬件,包括绞盘。
交付机制配置
包裹投递任务需要一些配置,必须在计划和执行任务前完成。
配置主要针对特定的硬件,因此在每种包裹传送硬件的设置页面中都有涉及:
任务规划
包裹投递任务的计划与其他任务大致相同 航点任务在 "任务项目 "中,有任务起点、起飞航点、各种路径航点以及可能的返回航点。唯一不同的是,包裹投递任务必须包含一个任务项,指明是否应在地面上释放包裹(例如,在地面上释放包裹时,任务项中必须包含 "在地面上释放 "字样)。土地)或空中 (航点) ,然后是另一个任务项目来部署软件包 (夹具机构).
无论您是否 土地 这取决于飞行器在飞行时能否安全地展开货包,以及飞行器能否在展开位置着陆。由于夹持器无法安全地放下货包,因此在使用夹持器时,多旋翼飞行器和 VTOL 飞行器通常会着陆来展开货包。
部署设备后 表示完成,飞行器将前往下一个航点。请注意,如果着陆,部署后的下一个任务项目应该是另一个 航点 或 起飞 任务项目不能是 返回.)
创建包裹投递任务
创建一个包裹递送任务(使用抓取器):
创建一个带有
起飞任务项目,以及所需飞行路线的附加航点。在地图上添加一个航点,标明您想在哪里释放软件包。
要在飞行中投放包裹,请为航点设置适当的高度(并确保航点位于投放包裹的安全位置)。
如果您想降落载具进行送货,您需要更改
航点至土地任务项目。方法是选择任务项目标题,然后选择土地弹出对话框。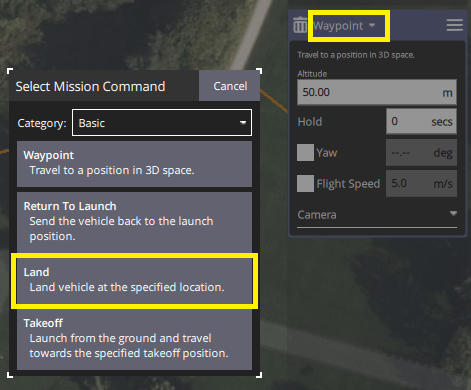
在地图上(任意位置)添加一个用于释放抓手的航点。要将其更改为
夹具机构选择"航点"标题,在弹出窗口中将组更改为"高级",然后选择夹具机构.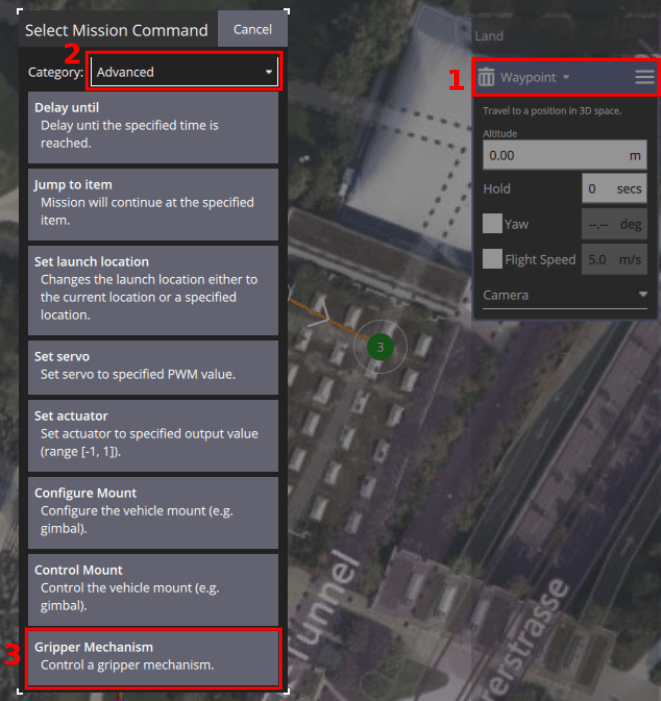
在编辑器中配置夹具的动作。
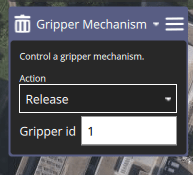
- 将其设置为 "Release",以释放软件包。
- 暂时不需要设置机械手 ID。
为剩余路径添加其他航点。如果您着陆了,那么请记住,您必须在
夹具机构在添加返回任务项目。
计划示例
包裹投放任务
这显示的是飞行器在飞行过程中投放包裹的任务计划。初始任务项目是一个航点,行动是一个 夹具释放 (任务项目表中显示)
注意高度图如何将预航路点显示为空中航路点,也在右侧面板上。
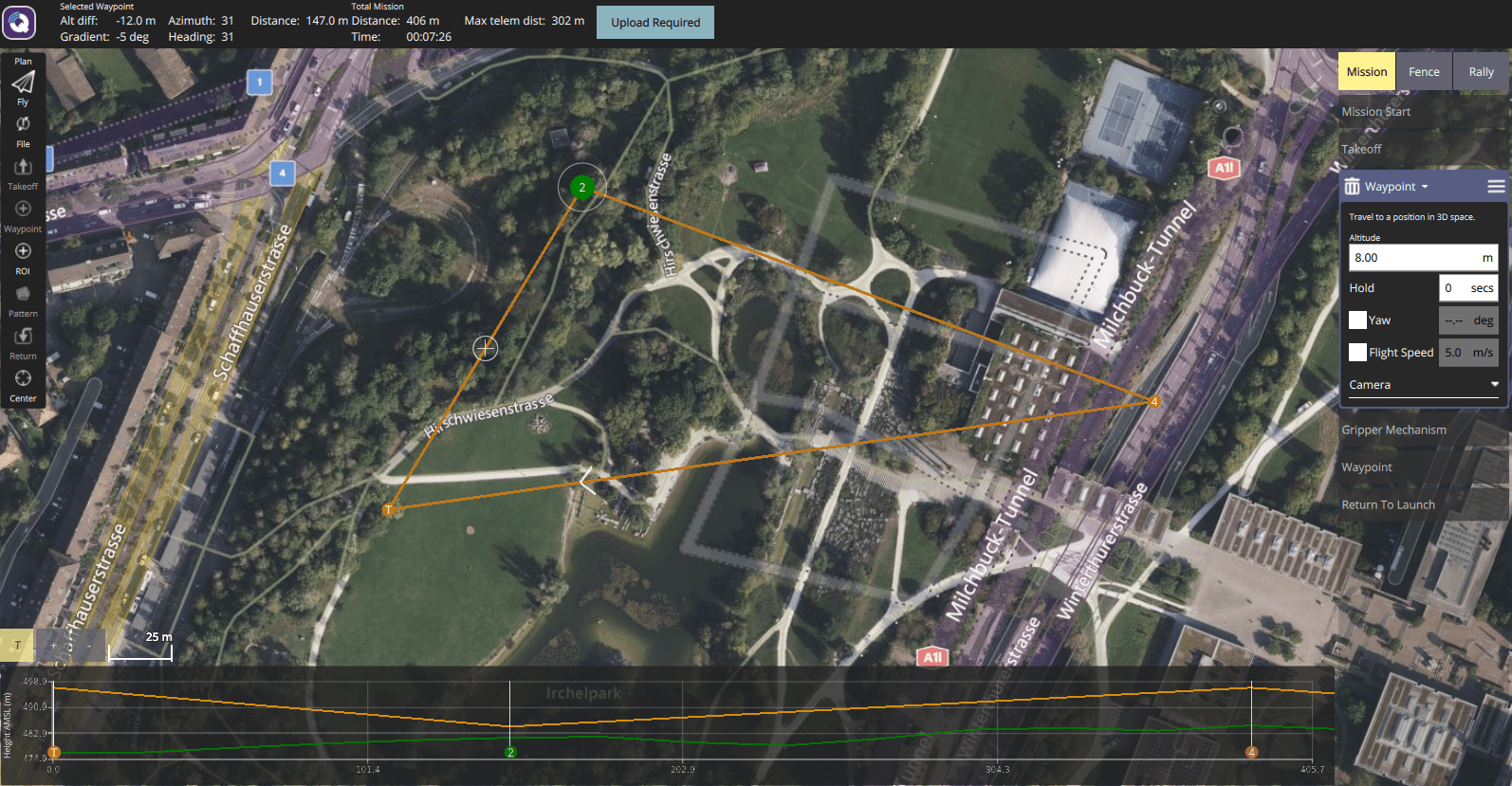
登陆和释放任务
这显示了飞行器着陆运送包裹的任务计划。
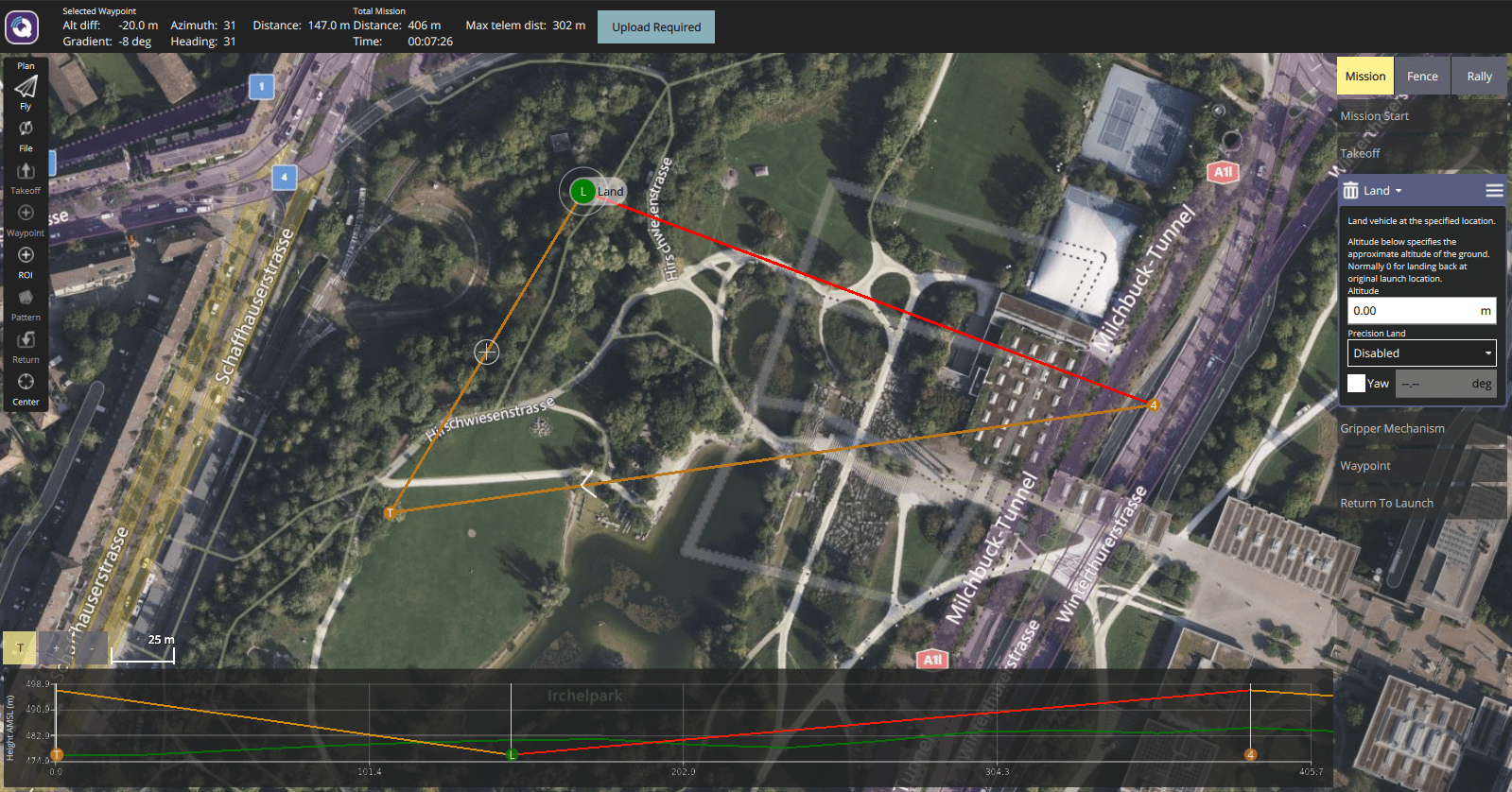
请注意高度图是如何显示 土地 项目
说明
带着陆功能的包裹投递 RTL 航点
不要用这样的交货方式计划任务: 土地 >; 抓取器 >; 返回发射场.
出于安全考虑,当载具着陆时,"返回发射 "功能将被禁用。相关问题).因此,如果您着陆、释放货物,然后有一个 RTL 航点,载具就会在着陆坐标处空转。
任务中对机械手的手动控制
机械手可以 使用操纵杆按钮手动控制 (如果已配置)在任何模式下,包括在执行任务期间。
但请注意,如果在包裹投递任务打开抓取器时手动命令关闭抓取器,抓取器将无法完成打开动作。任务将在有效载荷运送任务项目超时("超时")后恢复。MIS_PD_TO 过期,即使它尚未发布软件包。
任务中禁用自动解除警报功能
执行任务时,自动解除警报功能默认为禁用。这意味着在着陆运送包裹时,载具仍将处于上膛状态(潜在危险!)。
软件包发布反馈
任务将在一个 "软件包释放"任务项目(如 抓取器)完成。
机械手和其他传送设备要么使用传感器反馈,要么使用可配置的超时来指示完成。