多旋翼飞行器的振动抑制型轨迹
振动抑制轨迹类型可根据用户摇杆输入或任务变化(例如:拍摄、绘图、货运)提供平滑运动。它可生成对称的平滑 S 曲线,其中的颠簸和加速度限制始终得到保证。
在 任务模式.要在 位置模式 设置参数: MPC_POS_MODE=3.
信息
不使用挺举限制类型 默认情况下 在定位模式下。它可能不适合需要更快响应的载具/用例,如竞赛四轮驱动车。
轨迹生成器
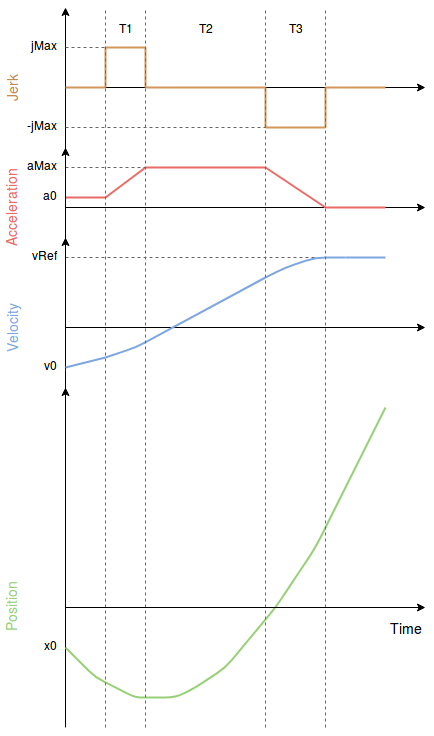
下图显示了一个典型的挺举受限轮廓,其约束条件如下:
jMax:最大挺举a0:初始加速度最大值:最大加速度a3:最终加速度(始终为 0)v0:初始速度vRef:所需速度
制约因素 jMax, 最大值 用户可通过参数进行配置,并可在手动位置控制和自动模式下进行不同的设置。
由此产生的速度曲线通常被称为 S 曲线。
手动模式
在手动位置模式下,摇杆被映射到速度上,此时 XY 摇杆的全偏转对应于 MPC_VEL_MANUAL 而一个完整的 Z 杆偏转对应于 mpc_z_vel_max_up (向上运动)或 mpc_z_vel_max_dn (向下运动)。
制约因素
XY 平面
jMax: MPC_JERK_MAX最大值: mpc_acc_hor_max
Z 轴
jMax: MPC_JERK_MAX最大值(向上运动): MPC_ACC_UP_MAX最大值(向下运动): mpc_acc_down_max
自动模式
在自动模式下,所需的速度为 MPC_XY_CRUISE 但该值会根据到下一个航点的距离、航点内可能达到的最大速度以及所需的最大加速度和颠簸度自动调整。垂直速度的定义是 mpc_z_v_auto_up (向上运动)和 mpc_z_v_auto_dn (向下运动)。
制约因素
XY 平面
jMax: MPC_JERK_AUTO最大值: MPC_ACC_HOR
Z 轴
jMax: MPC_JERK_AUTO最大值(向上运动): MPC_ACC_UP_MAX最大值(向下运动): mpc_acc_down_max
接近航点时的速度增益距离: