查找/更新参数
可通过以下方式配置/调整 PX4 行为 参数 例如 多旋翼飞行器 PID 增益校准信息等)。
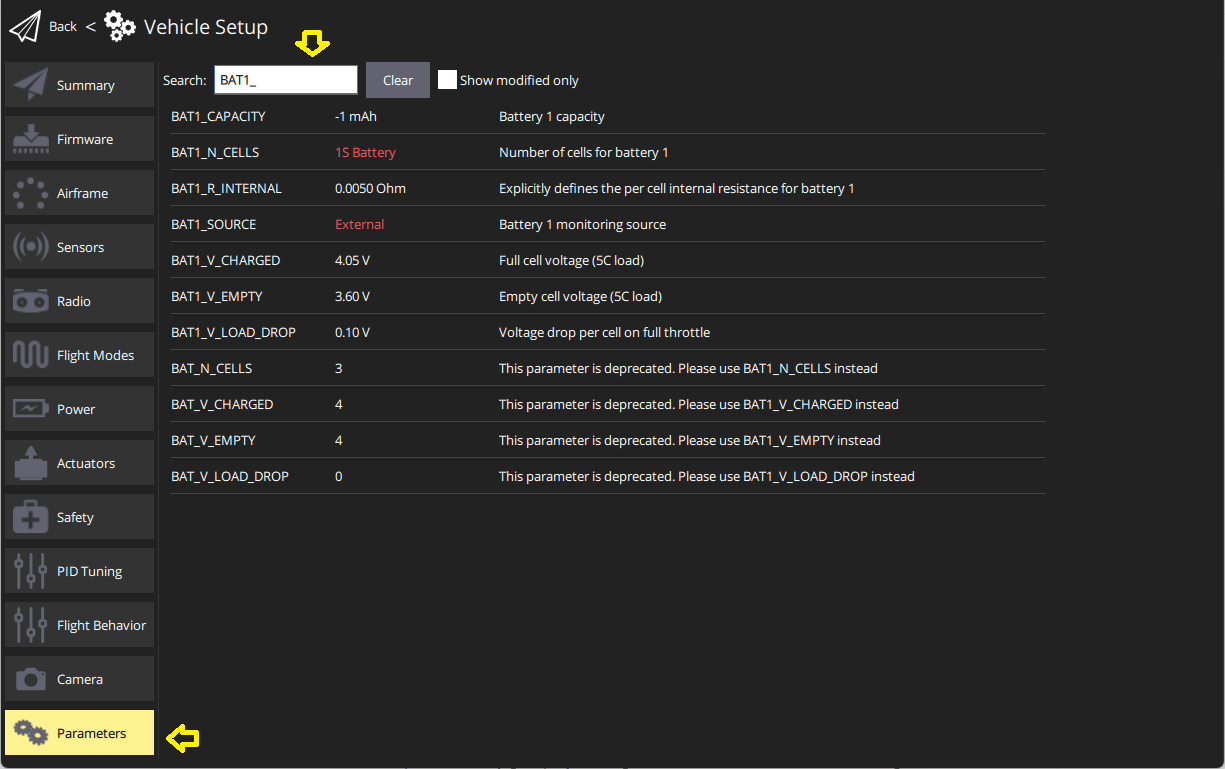
QGroundControl 参数 屏幕允许您查找和修改 任何 与载具相关的参数。点击 Q 应用程序图标 载具设置然后 参数 在侧边栏中。
信息
大多数常用参数都可以通过专用设置屏幕进行设置,更方便的设置方法见 标准配置 节。该部分 参数 在修改较少修改的参数时,例如在调试新车时,需要使用该屏幕。
警告
虽然某些参数可以在飞行中更改,但不建议这样做(除非指南中有明确说明)。
查找参数
您可以通过在 搜索 字段。这将显示包含输入子字符串的所有参数名称和描述的列表(按下 清晰 重置搜索,并使用 仅显示已修改 复选框来过滤未更改的参数)。
您还可以点击左侧的按钮,按类型和组别浏览参数(下图中的"......")。 DShot 组中的 标准 参数)。
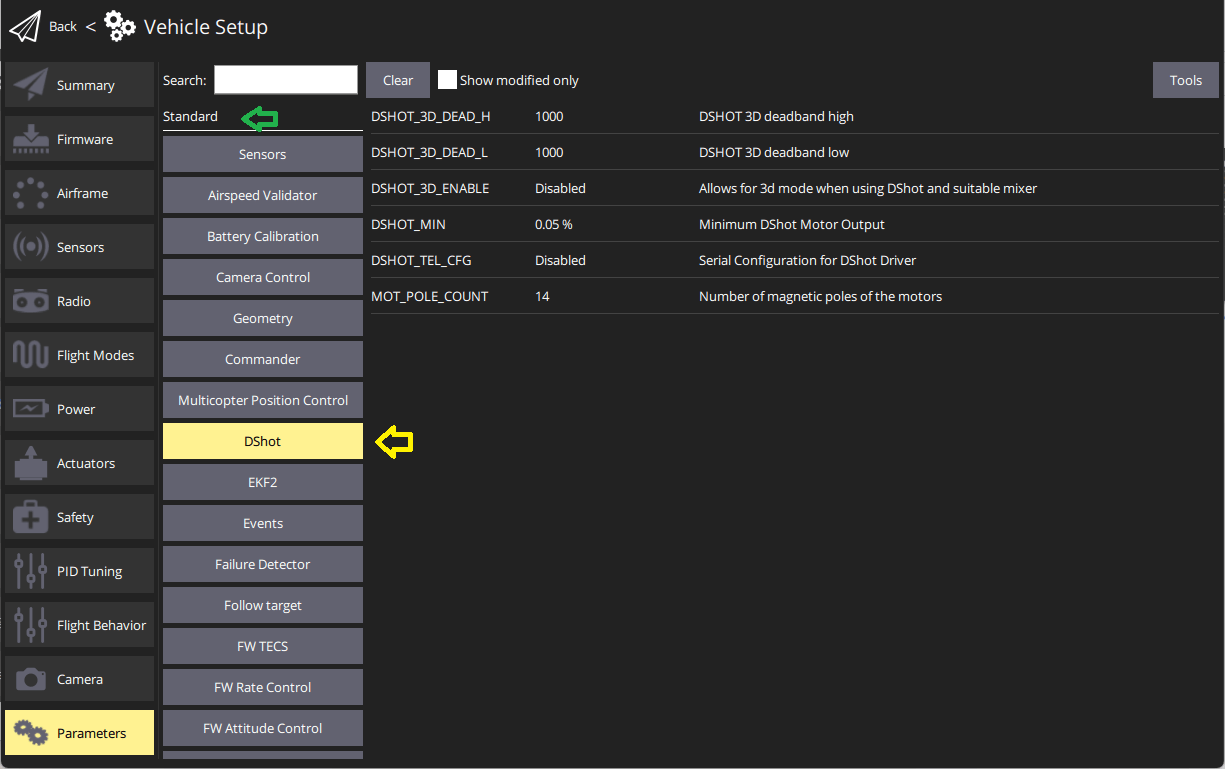
如图所示,您可以展开/折叠"类型"分组。请注意,底部名为 第 X 部分 附上 DroneCAN 外围设备 ("X"是节点 ID)。 QGC 可以设置参数 如果这些外围设备在 QGC 启动时连接到飞行控制器上,则可以使用这些外围设备。

TIP
如果找不到预期参数,请参见 下一节.
缺失的参数
参数通常不可见,因为它们要么取决于其他参数,要么在固件中不存在(见下文)。
条件参数
如果一个参数以另一个未启用的参数为条件,则该参数可能不会显示。
通常可以通过搜索 完整参数参考 和其他文件。特别是 串行端口配置参数 取决于为串行端口分配的服务。
固件中没有参数
固件中可能不存在某个参数,因为您使用的是不同版本的 PX4,或者您使用的版本不包含相关模块。
每个 PX4 版本都会添加新参数,现有参数有时会被删除或重命名。您可以检查某个参数是否 应 通过审查 完整参数参考 以查找目标版本的参数。您还可以在源代码树和发行说明中搜索参数。
参数可能不在固件中的另一个原因是其相关模块未被包含在内。对于 FMUv2 固件它省略了许多模块,使 PX4 能够容纳在 1MB 的可用闪存中。有两种方案可以解决这个问题:
检查是否可以更新电路板以运行 FMUv3 固件,其中包括所有模块: 固件 > FMUv2 引导加载程序更新
如果电路板只能运行 FMUv2 固件,则需要 改造 PX4 启用缺失的模块。您需要通过 make px4_fmuv2_default boardconfig 重新配置 PX4 固件本身,在其中启用/禁用模块。
信息
您可能还需要禁用其他模块,以便将重建的固件装入 1MB 闪存中。要找到可移除的模块需要一些试验/错误,这取决于您需要载具满足哪些使用情况。
更改参数
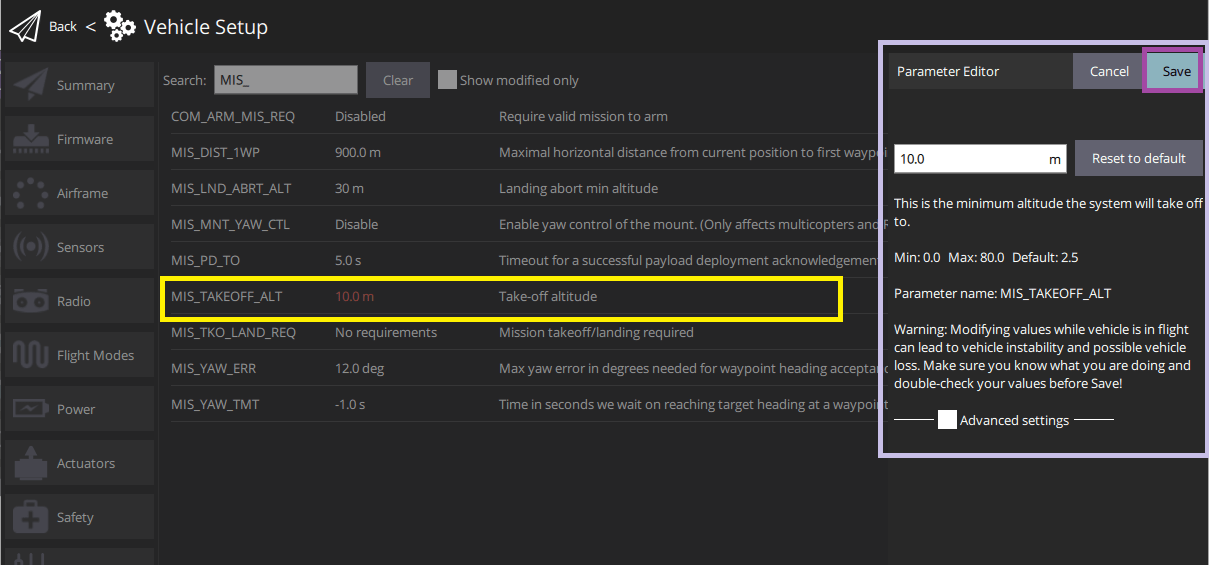
要更改参数值,请单击组或搜索列表中的参数行。这将打开一个侧边对话框,您可以在其中更新参数值(该对话框还提供有关参数的其他详细信息,包括是否需要重启才能使更改生效)。
信息
当您点击 节省 参数会自动静默上传到连接的飞行器。根据参数的不同,您可能需要重新启动飞行控制器才能使更改生效。
工具
您可以从 工具 屏幕右上方的菜单。
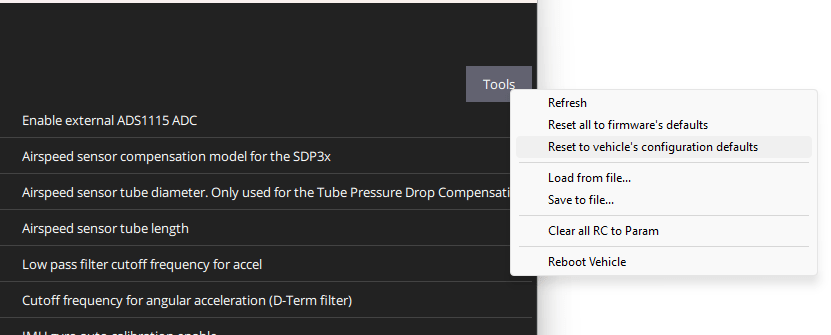
刷新
通过重新请求载具的所有参数值来刷新参数值。
全部重置为固件默认值
将所有参数重置为固件中的原始默认值。
重置为载具配置默认值
针对所选的特定 airfame 配置,将所有参数重置为原始默认值。
从文件加载/保存到文件
从现有文件加载参数或将当前参数设置保存到文件中。
清除所有 RC 到参数
这将清除遥控发射机控制和参数之间的所有关联。更多信息请参阅 无线电设置> 参数调整参数频道.
重启载具
重新启动载具(更改某些参数后需要)。