Aion Robotics R1 UGV
主页(PX4 v1.15)Aion R1选择该载具是为了测试和改进 PX4 的差分驱动支持,并改进对 Roboclaw 电机控制器(例如:PX4)的驱动支持。 机械爪 2x15A.
这里的文档和驱动程序信息还能让您更轻松地与其他载具上的 Roboclaw 控制器配合使用,并与以下载具配合使用 Aion R6.
目前,PX4 支持手动模式进行此设置。
部件清单
装配
装配包括一个 3D 打印框架,所有自动驾驶仪部件都安装在框架上。在这次制造中,包括一个 Auterion Skynode它与 Pixhawk 适配器板相连,后者通过串行接口与 RoboClaw 电机控制器连接。
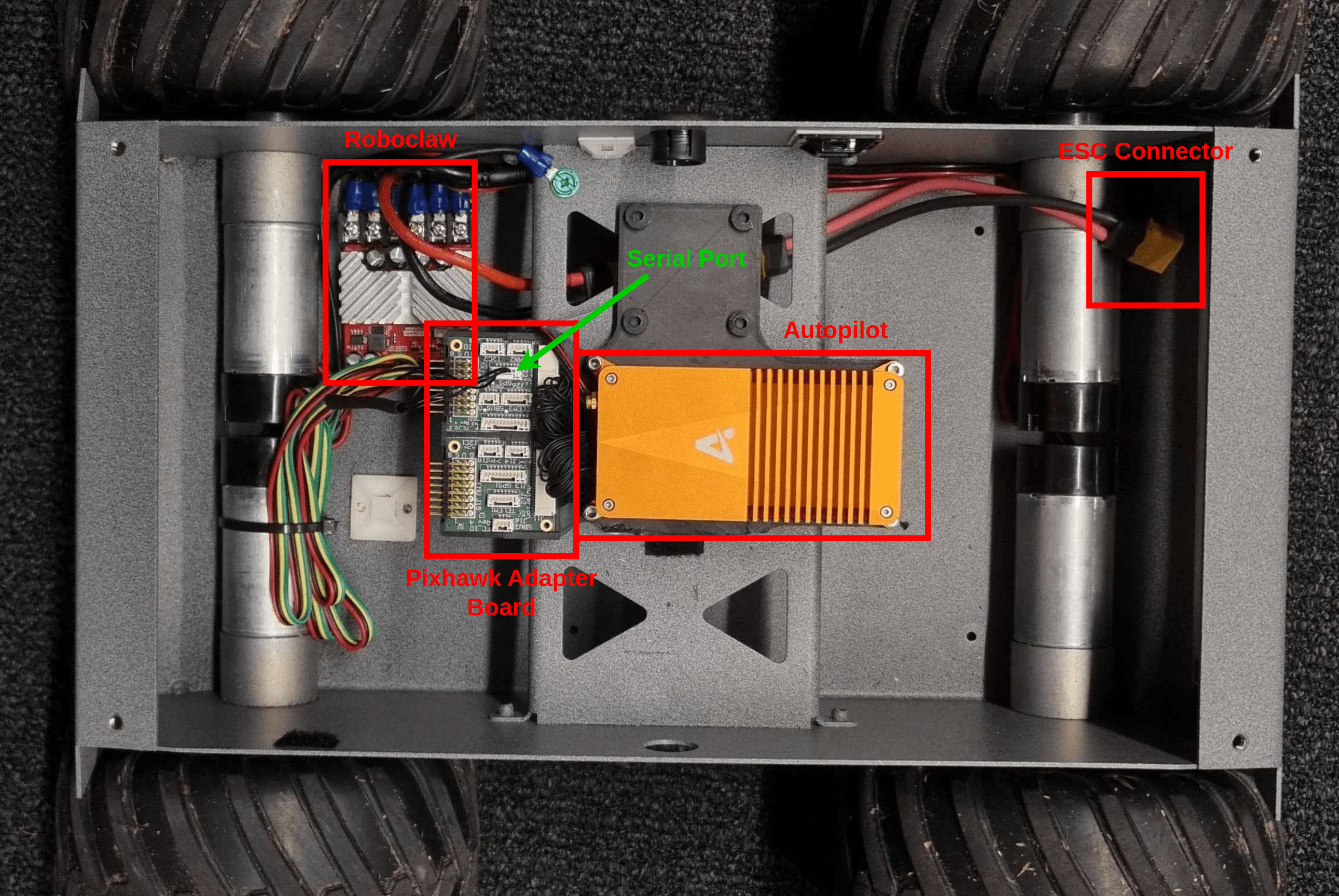
信息
如果使用标准 Pixhawk,您可以将 RoboClaw 连接到自动驾驶仪,而无需使用适配器板。
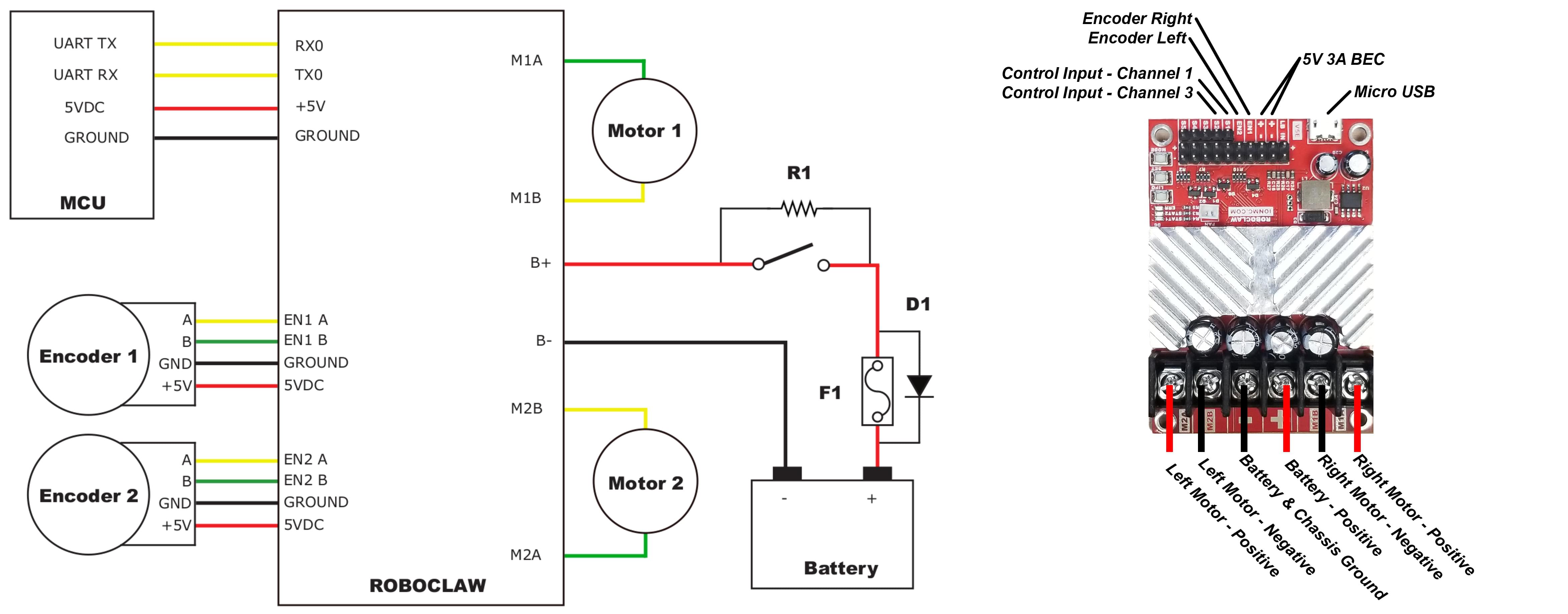
RoboClaw 应连接到飞行控制器上合适的串行(UART)端口,例如 GPS2 或 TELEM1.其他机械爪接线详见 机械爪用户手册 '分组串行布线'部分,如下所示(此设置已通过兼容性验证)。
PX4 配置
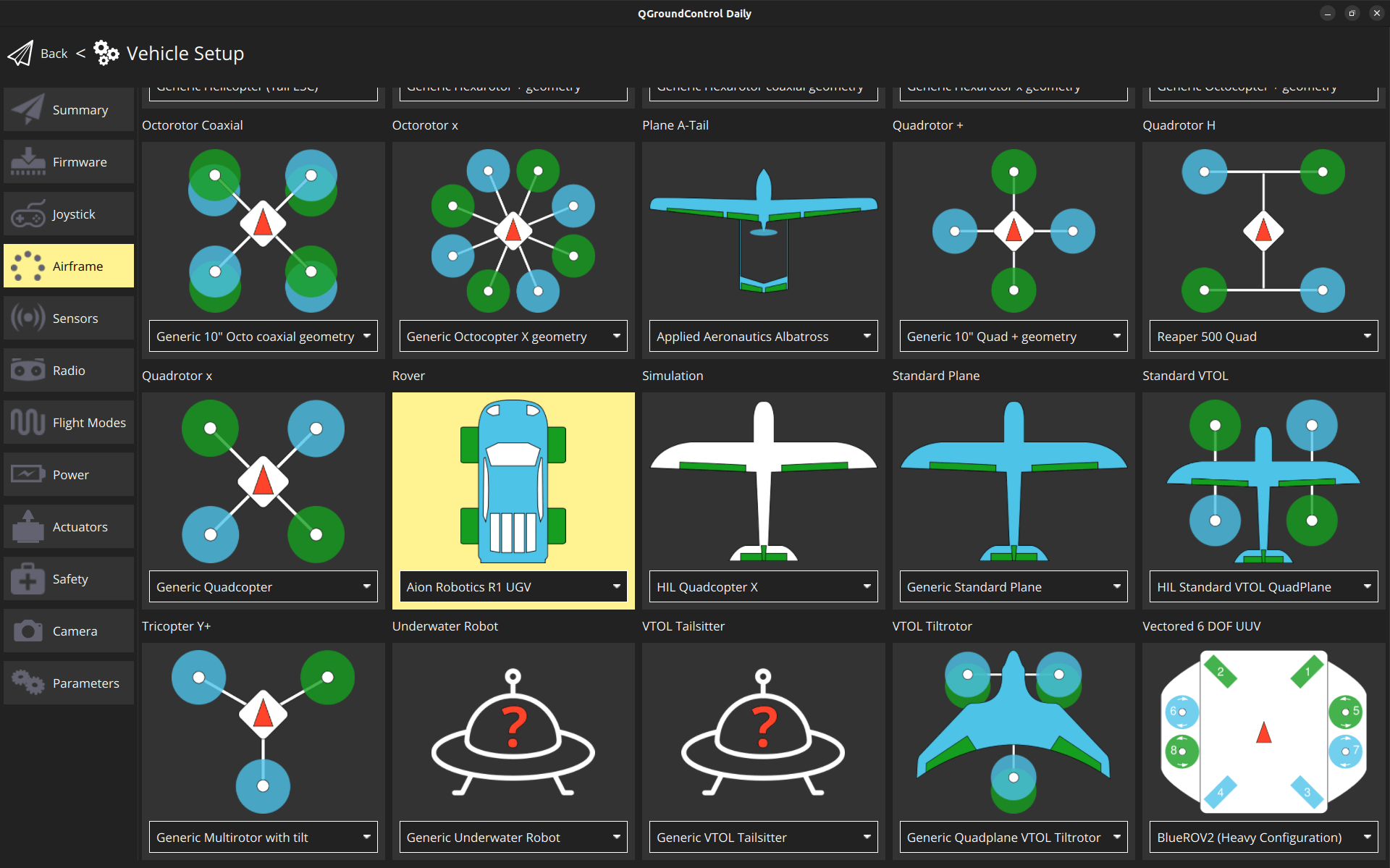
漫游车配置
使用 QGroundControl 用于漫游车配置:
机械爪配置
首先配置串行连接:
导航至 参数 部分。
设置 RBCLW_SER_CFG 参数到连接 RoboClaw 的串行端口(如
GPS2).rbclw_counts_rev 指定车轮转动一圈所需的编码器计数次数。该值应保持在
1200测试的RoboClaw 2x15A 电机控制器.根据具体的编码器和滚轮设置调整数值。RoboClaw 电机控制器必须在总线上分配一个唯一地址。默认地址为 128,无需更改(如果需要更改,请更新 PX4 参数)。 RBCLW_ADDRESS 以匹配)。
信息
PX4 不支持在同一辆车内安装多个 RoboClaw 电机控制器,每个控制器在总线上都需要一个唯一的地址,而在 PX4 中只有一个参数可用于设置地址 (
RBCLW_ADDRESS).
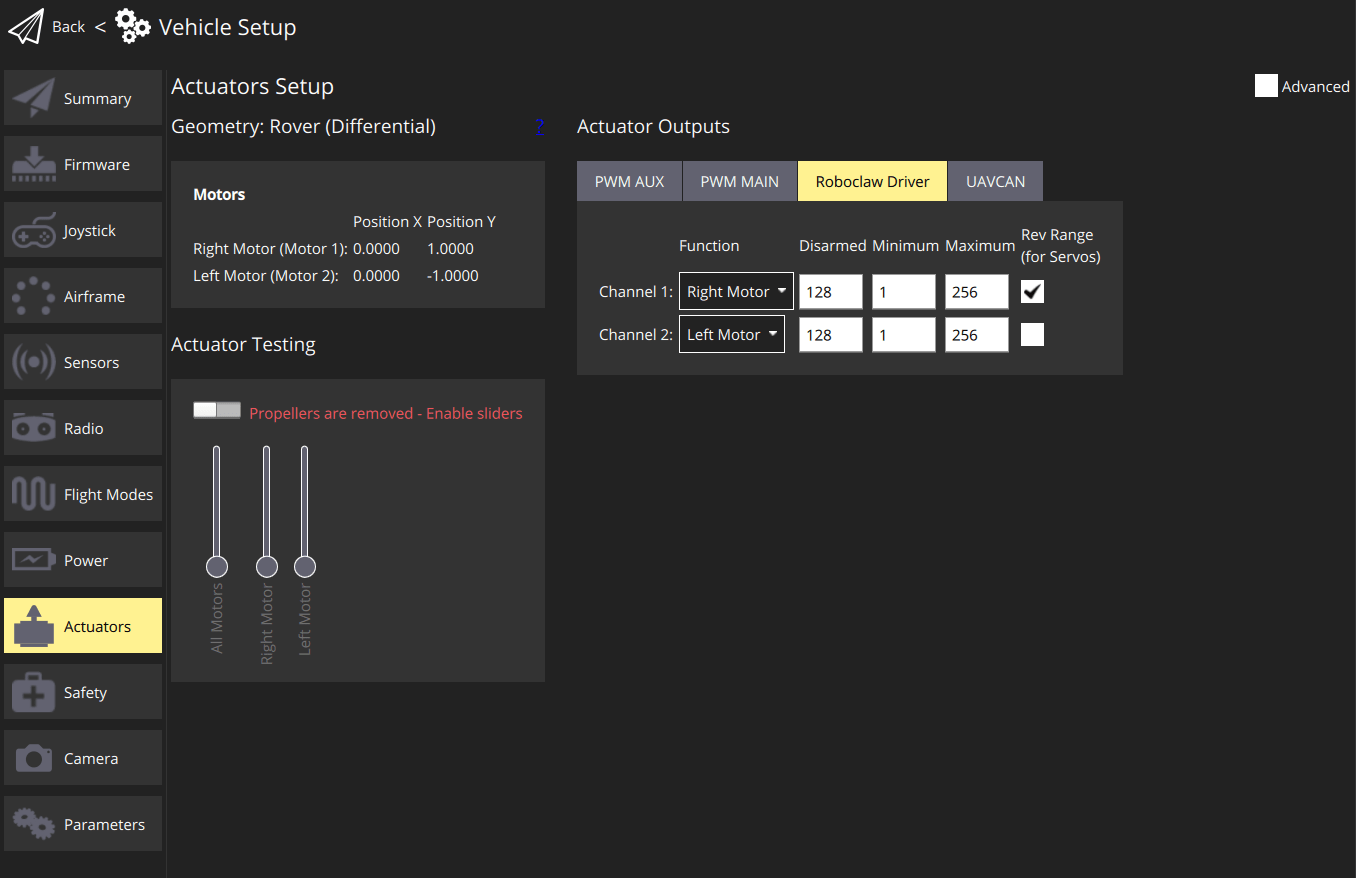
然后配置执行机构配置:
导航至 致动器配置与测试 在 QGroundControl 中。
从以下列表中选择 RoboClaw 驱动程序 致动器输出.
有关通道分配、解除警报、最小值和最大值,请参阅下图。
对于有两个以上电机的系统,可以为多个电机分配相同的功能。出现异常值的原因可以在 机械爪用户手册 根据
兼容性命令对于数据包串行:平实驱动电机前进。有效数据范围为 0 - 127。127 = 全速前进,64 = 低速前进。 大约半速前进,0 = 完全停止。
另见
- 强盗法 驱动程序
- Roboclaw 用户手册