OMP Hobby ZMO FPV
OMP Hobby ZMO 是一款小型的 倾转旋翼机 VTOL 的 RTF 套件。本制作指南展示了如何添加飞行控制器系统(使用 Auterion Skynode 评估套件, Pixhawk 6C 或 Pixhawk 6C mini)并设置 PX4。


概述
机身主要特点
- 结构紧凑,便于运输
- 预装制动器
- 快装翼连接系统
- 套件中包括运输箱
- ~35 分钟的超长飞行时间(取决于起飞重量)
- VTOL 可在固定翼无法飞行的地点飞行
- 套件中包括电池和充电器
- 整体结构简单
- 前部可安装 FPV 和/或动作相机
根据最终起飞重量,悬停时间可能会受到限制(悬停时机身内空气流通不畅,因此电调可能会过热)。
购买地点
飞行控制器
已对以下选项进行了测试:
FC 的最大尺寸大约为50x110x22 毫米
附加配件
- GPS F9P(包含在 Skynode 评估套件中)
- GPS M9N(F9P 的廉价替代品)
- 空速传感器(包含在 Skynode 评估套件中) - 建议提高安全性和性能
- 空速传感器(更便宜的替代品)
- Lidar Lightware lw20-c(包含在 Skynode 评估套件中) 可选
- Lidar Seeed Studio PSK-CM8JL65-CC5(更便宜的替代品) 可选
- 5V BEC
- 无线电 (RC) 系统 您喜欢的
- 伺服电缆延长线公头 30 厘米 10 件
- USB-C 延长线
- 3M VHB 胶带
- 三轴打印支架
- 2 个机翼连接器支架
- 1x 空速传感器支架
- 1x GPS 支架
- 1x 激光雷达支架
- 1x Skynode 支架
- USB 摄像头(包含在 Skynode 开发套件中)
- 螺钉、插件、热缩管等。
工具
本次构建使用了以下工具。
- 六角螺丝刀套装
- 扳手套件
- 焊接站
- 胶水热胶、5 分钟环氧树脂
- 胶带
- 3M 双面胶 (3M VHB 胶带)
- 砂纸
- 三轴打印机
硬件集成
准备工作
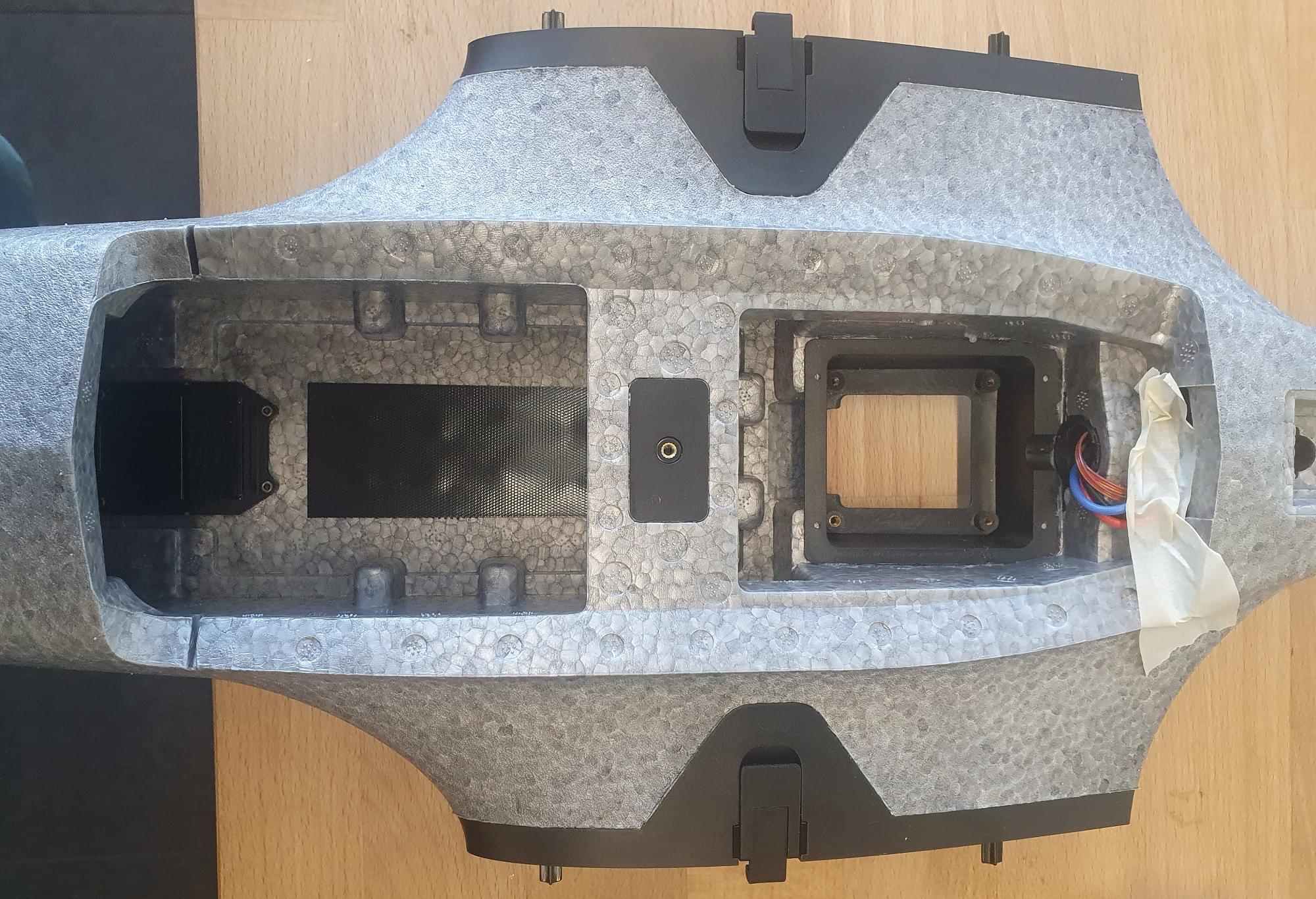
拆下原有的飞行控制器、电调和机翼连接器电缆。同时取下螺旋桨。这将有助于您操作飞行器,并降低因无意中启动发动机而受伤的风险。
原始状态下的 ZMO FPV。
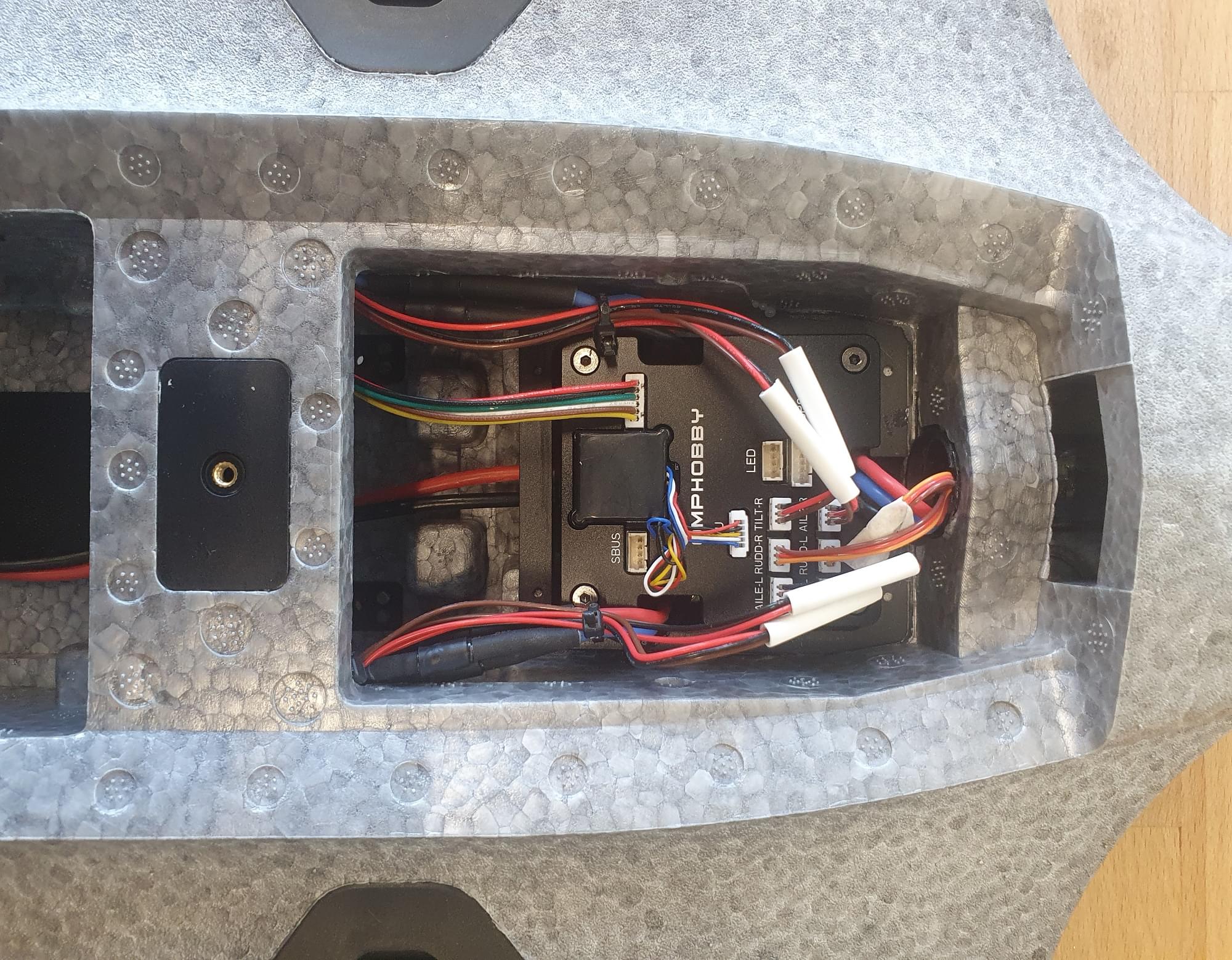
从飞行器上拆下飞行控制器和机翼连接器。
造血干细胞
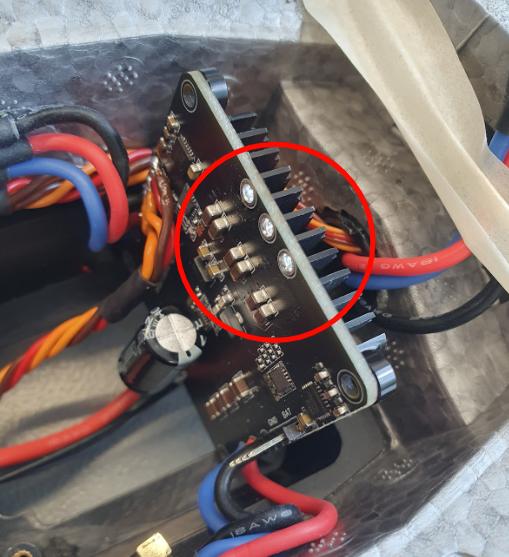
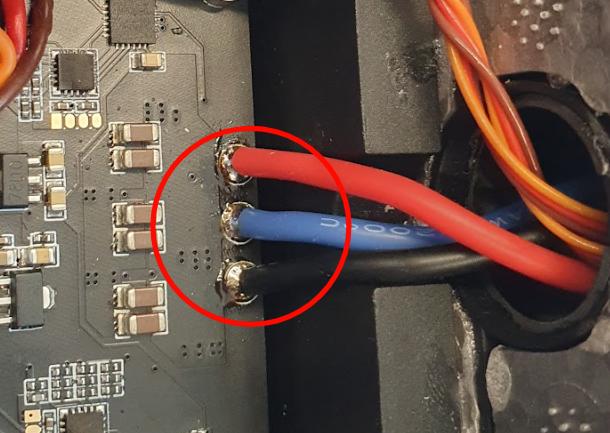
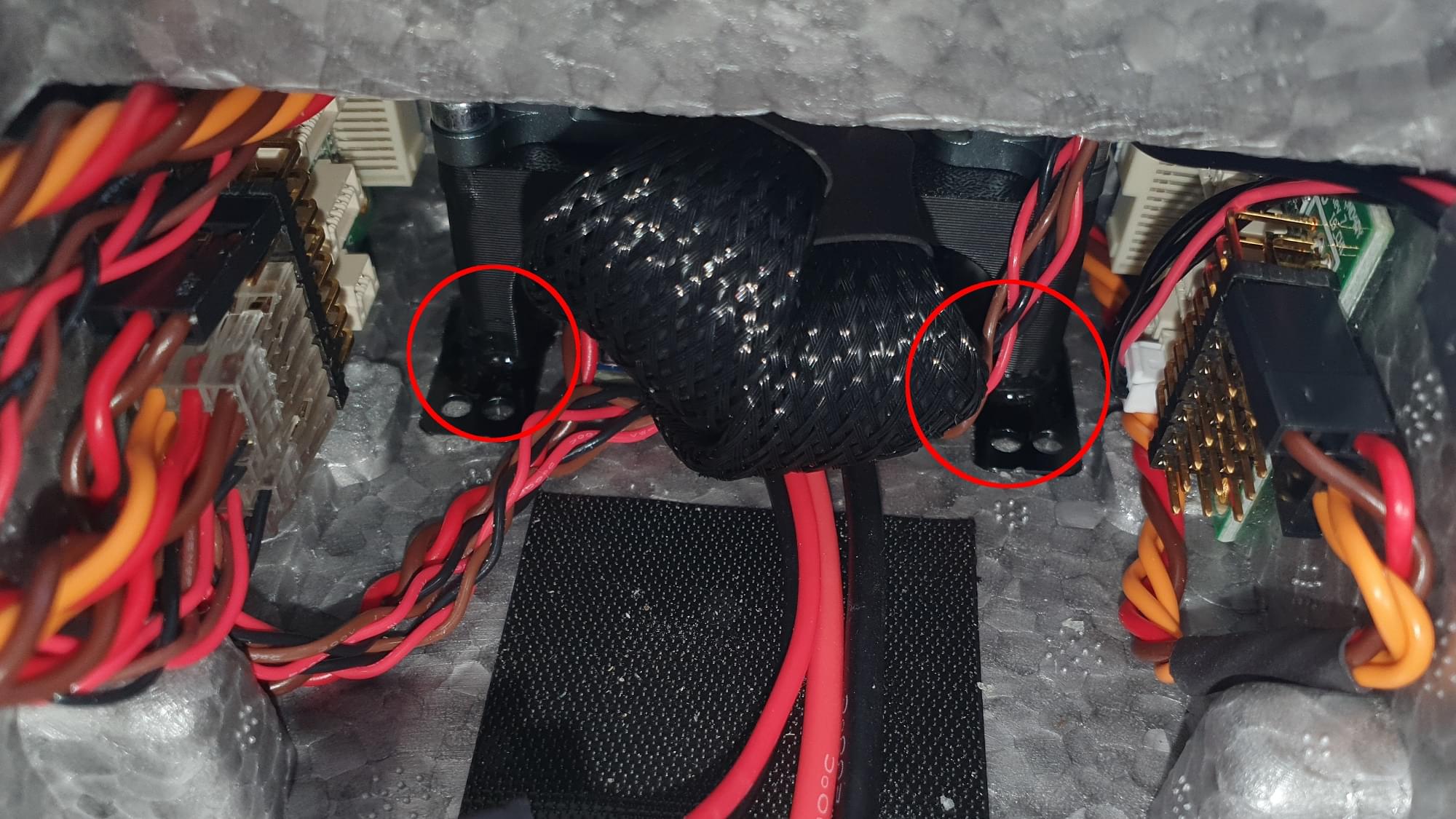
拆下电调 PWM 信号引脚和接地引脚,在引脚上焊接一些伺服延长线。电线应足够长,以便将电线连接到飞行控制器的 FMU 引脚上。
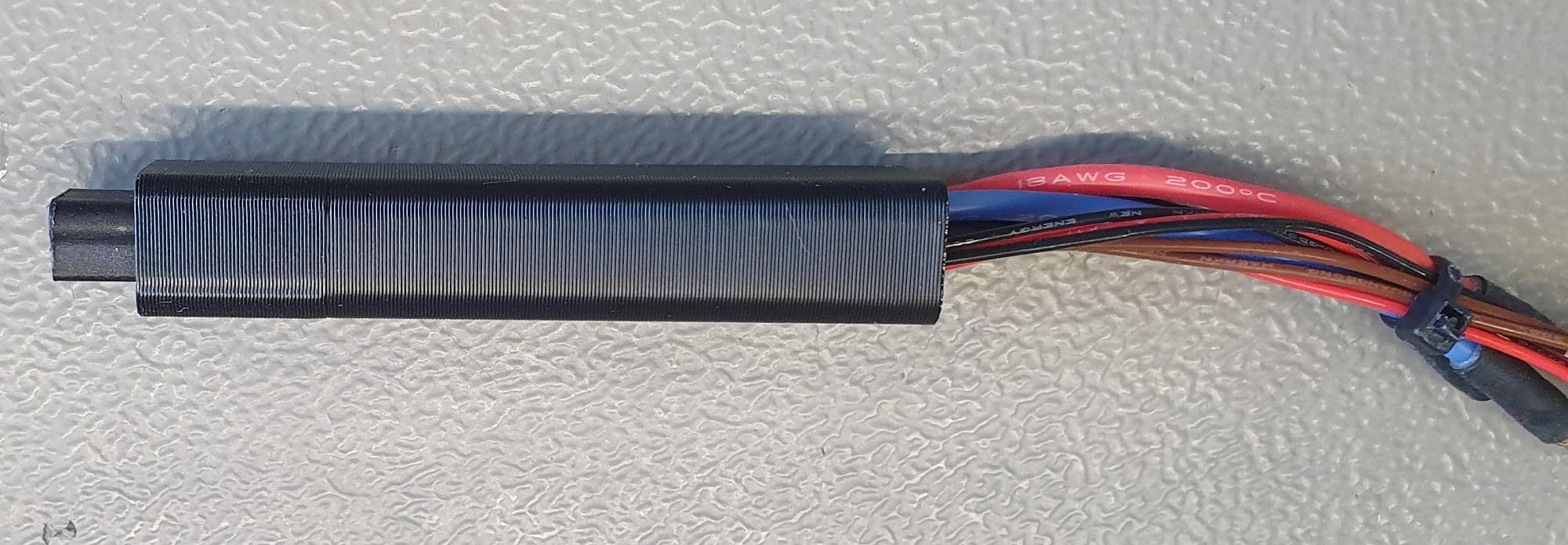
拆焊后部电机的 3 个香蕉插头母接头(集成 Pixhawk 6 时可能不需要)。
用 4 个 M2.5 x 12 螺钉将电调拧回原位。
如图所示,将后电机线缩短并焊接到位。
将信号线和接地线焊接到电调的 PWM 输入端。
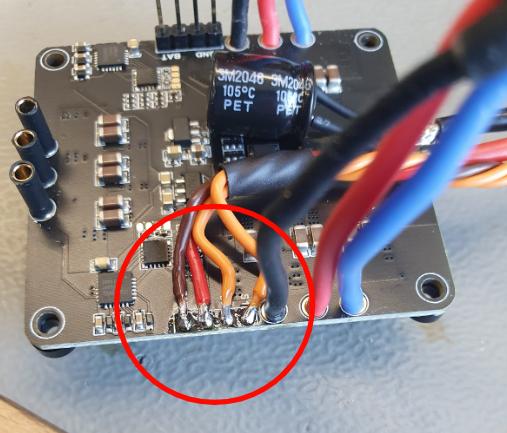
取下电调上的香蕉插头。这将为您安装飞行控制器提供更多空间。
将后部电机线焊接到电调上。确保连接时电机旋转方向正确。
翼形连接器
为了在连接机翼时直接连接机翼连接器,需要使用一些 3D 打印的支架将连接器对准中心。这一步并不是必须的,但却能让操作变得更简单,而且在野外安装飞机时也少了一步需要担心的问题。
用热熔胶或 5 分钟环氧树脂将机翼连接器粘到 3D 打印部件上。
将带有连接器的 3D 打印部件粘到机身上。确保在胶水固化时正确对齐连接器。
对齐连接器的最简单方法是在胶水固化时安装机翼,但要确保机身和机翼之间没有胶水,否则机翼可能会被粘住。
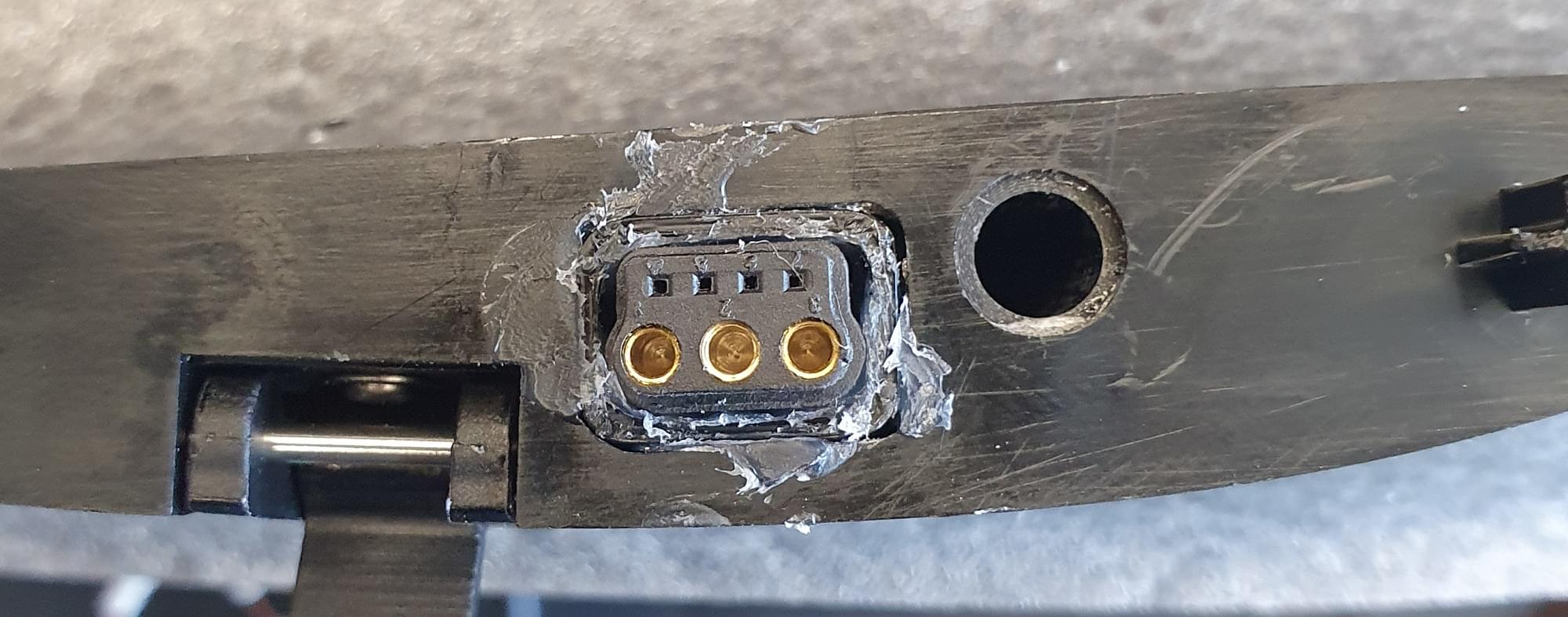
粘合到 3D 打印部件中的连接器
粘在机身上的连接器。确保正确对齐连接器。
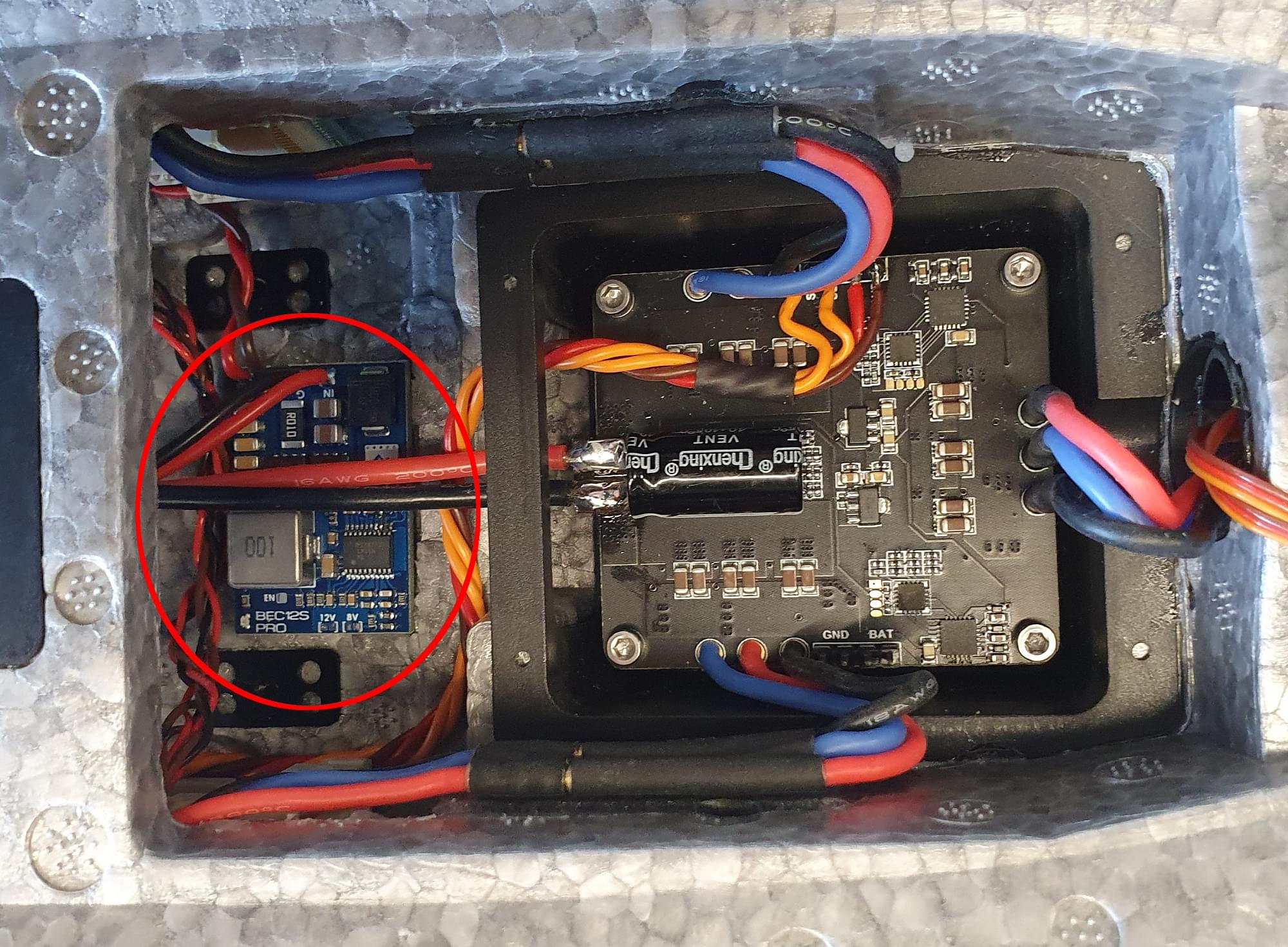
Pixhawk 适配器板和 BEC
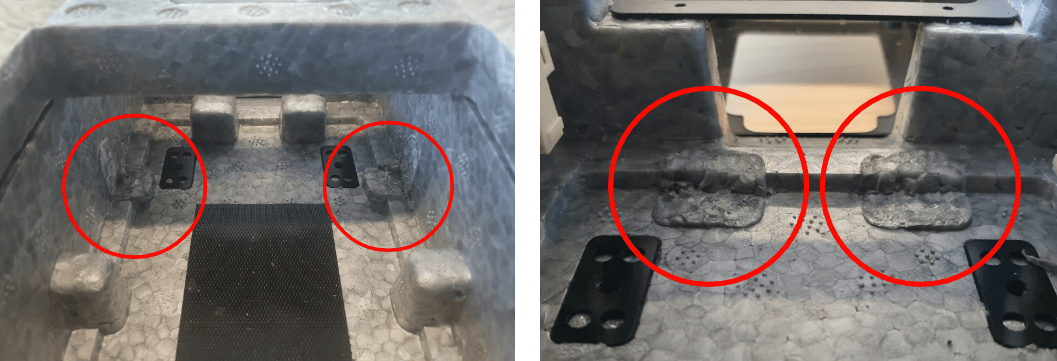
如图所示切割泡沫,以便为使用双面胶安装 Pixhawk 适配器板和 BEC 留出空间。FMU 板放在机身左侧(飞行方向)。将舵机连接器和电池电压电缆焊接到 BEC 上。
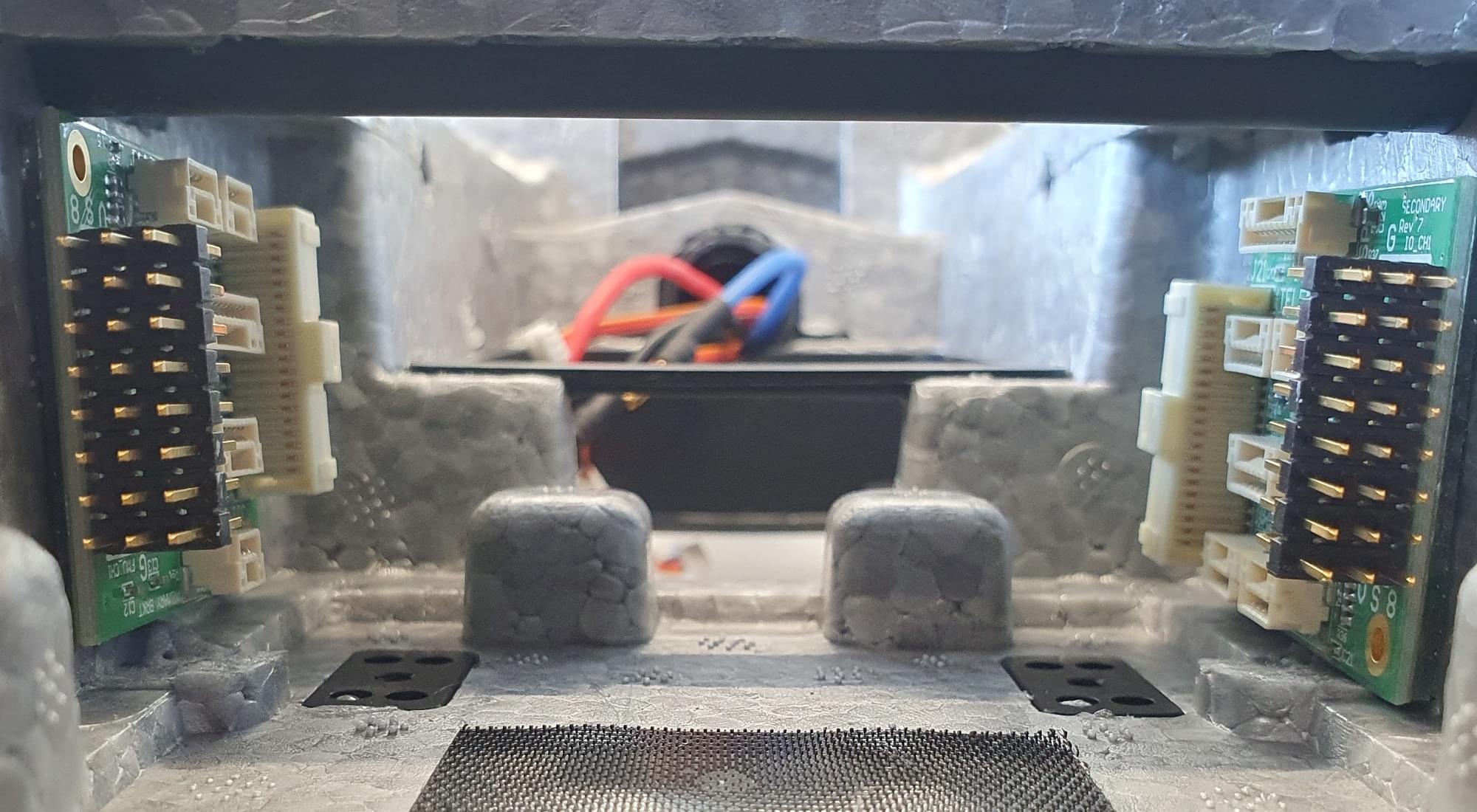
准备将 BEC 连接到 IO 板和电池。BEC 也可以直接焊接到电调的电池焊盘上。

用双面胶安装 BEC。
电缆
剪掉舵机上的连接器,将舵机延长线焊接到电缆上。确保电缆足够长,可以到达 Pixhawk 适配器板。如果您有压接工具,也可以直接添加连接器,无需焊接。
按以下顺序将伺服电缆插入适配器 IO 板:
- 1 - 左副翼
- 2 - 右副翼
- 3 - 左 V 形尾翼
- 4 - 右 V 形尾翼
- 5 - 向左倾斜
- 6 - 向右倾斜
按以下顺序将电机信号线插入 FMU 适配器板:
- 1 - 左前方
- 2 - 右前方
- 3 - 后部
传感器
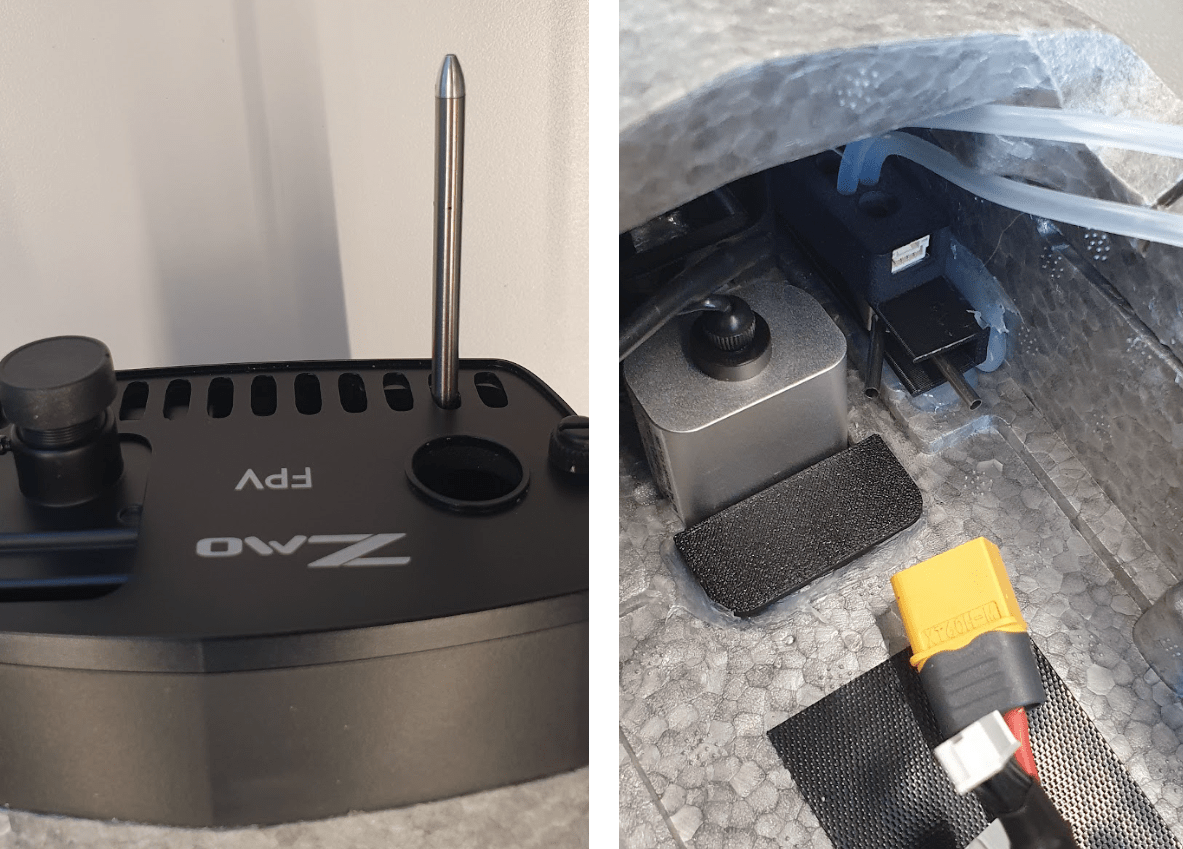
皮托管
首先,检查皮托管是否与 3D 打印的支架相匹配。如果是,则用胶水将皮托管安装到位。
要对准导管,请将其穿过 FPV 前板右侧的第二个孔。该支架可将导管推回机身,以便在运输和搬运过程中对其进行保护。可使用双面胶将传感器装置安装在 3D 打印支架的顶部。
将 3D 打印的支架粘合到位。
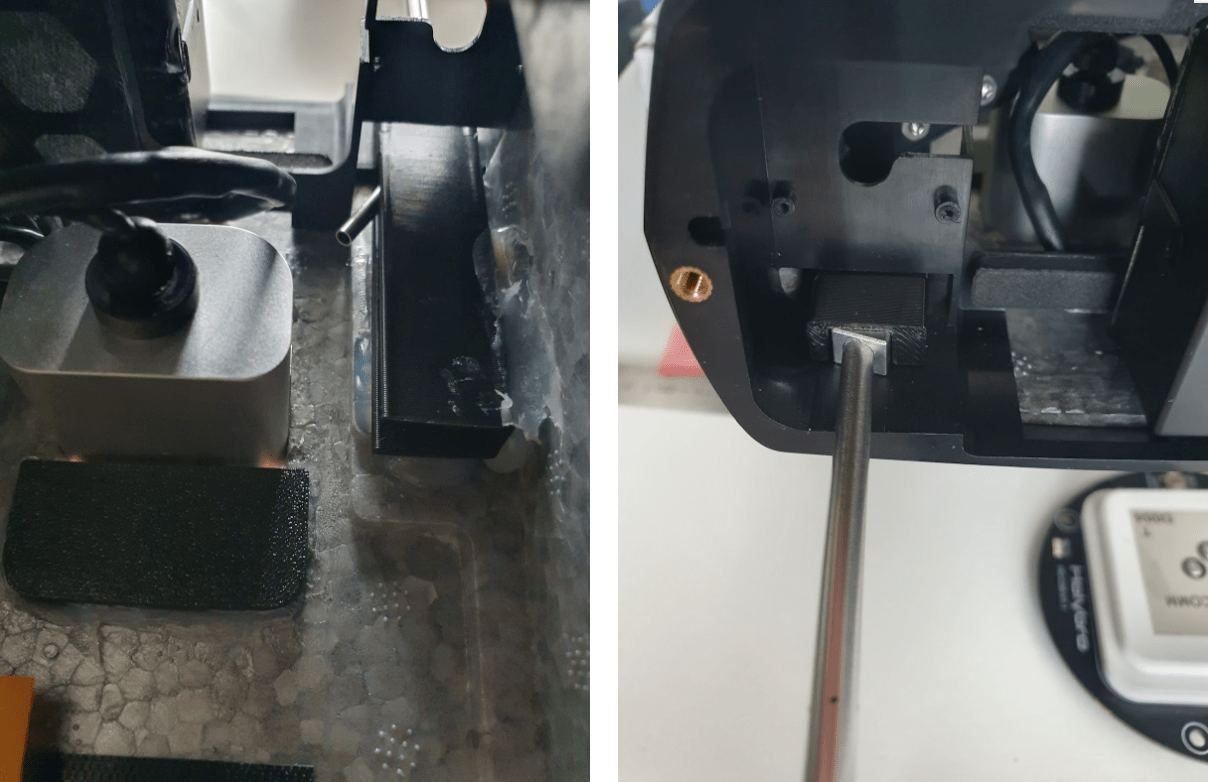
传感器可安装在 3D 打印支架的顶部。
激光雷达
如有需要,可在机身前部安装激光雷达。
安装激光雷达
- 拆下散热器
- 将激光雷达和 3D 打印激光雷达支架粘合到位。

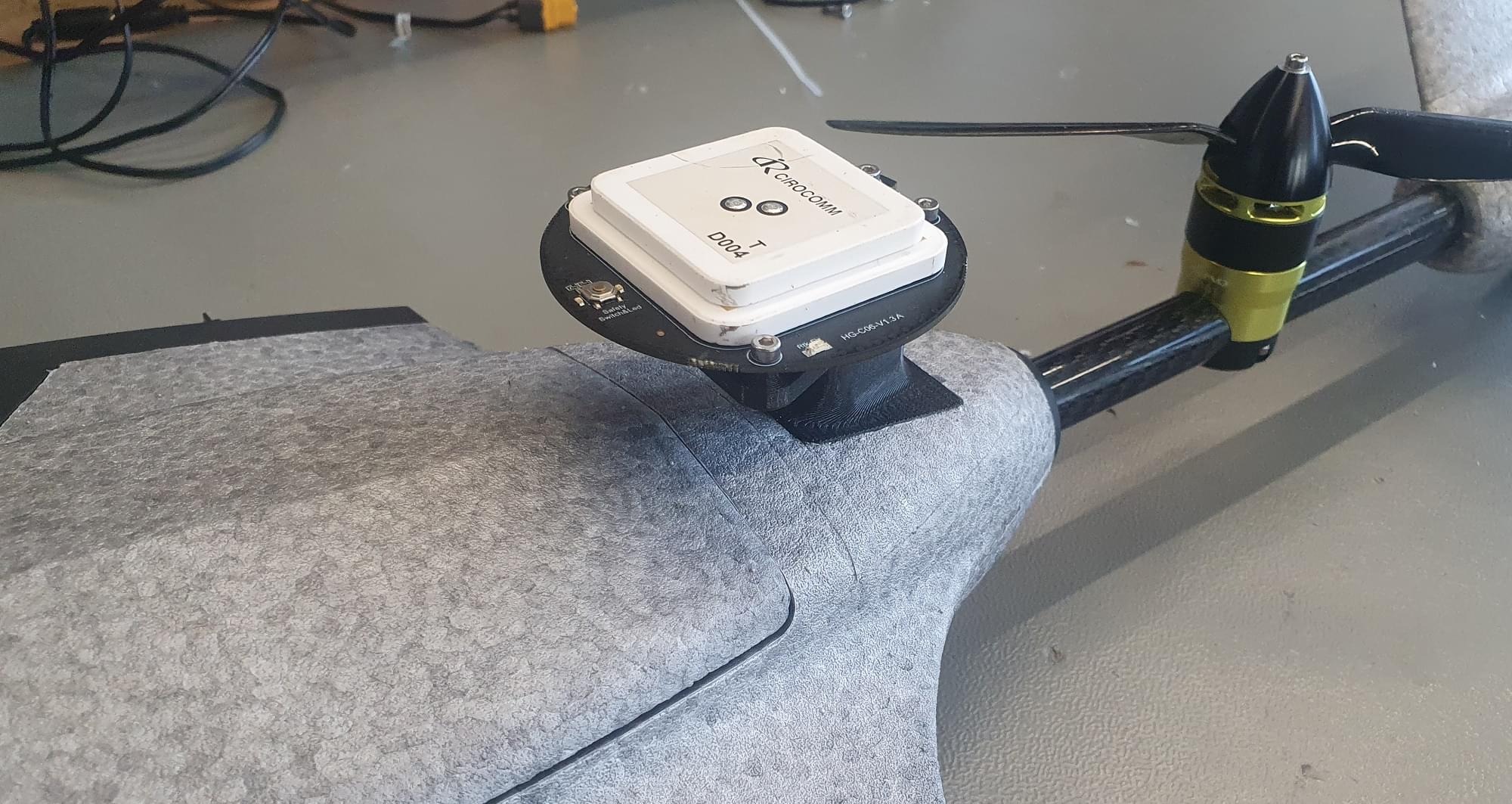
全球定位系统/指南针
安装 GPS:
- 用 3 个 M3x10 螺钉将两个 3D 打印部件拧在一起。
- 将 GPS 从塑料盒中取出,拔下连接器。
- 将电缆穿过碳刺。
- 用 5 分钟环氧树脂粘合 3D 打印部件。
- 胶水固化后,用 4 个 M2.5x10 螺钉将 GPS 固定在板上。
USB 照相机
剪断相机的 USB 电缆,使其长度为 15 厘米。
将 USB 适配器电缆剪成 25 厘米长,然后将两根电缆焊接在一起。
安装摄像头时,需要在墙上的泡沫塑料上开孔。
然后用双面胶将摄像头安装到墙上。
飞行控制器
飞行控制器可安装在电调上方。
Pixhawk 6c/6c mini
如果使用 Pixhawk 6c 或 6c mini,只需用双面胶将飞行控制器粘贴到位即可。
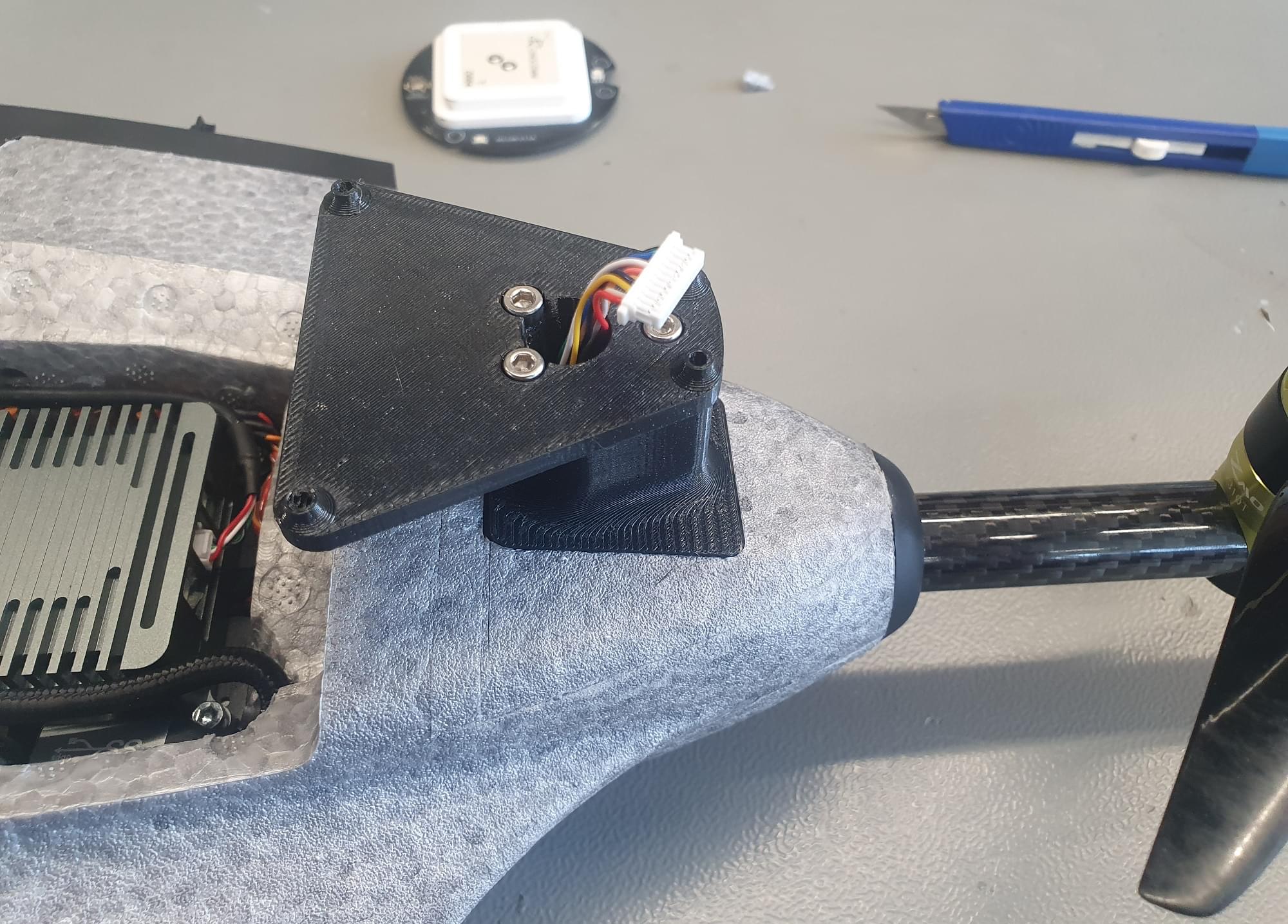
Skynode
如果使用 Skynode
- 将其放在电子调速器的顶部,并在 ZMO 的注塑塑料件上标出后部的两个安装位置。
- 从车上卸下 Skynode,用 2.8 毫米钻头在塑料部件上钻 2 个孔。
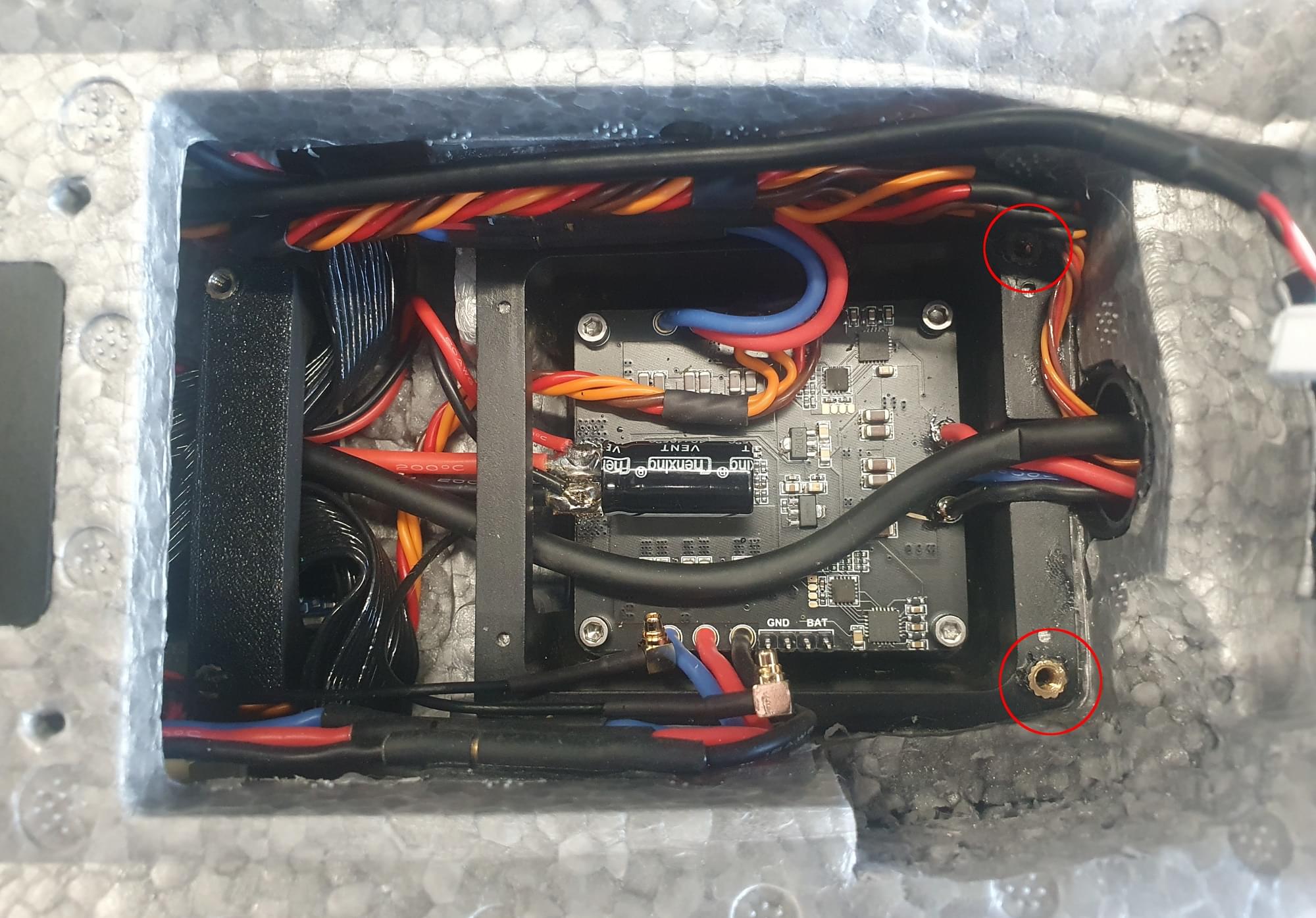
- 将 Skynode 放回原位,用 2 个 M3x10 螺钉将其拧紧。
另一种方法是在孔中添加螺纹插件。由于 ZMO 的注塑部分非常薄,因此需要用胶水粘合。
用 2 个 M3x10 螺钉将 Skynode 前支架固定在 Skynode 上。
然后在支架底部加入一些 5 分钟的环氧树脂,并在 Skynode 的顶部放置一个重物,直到胶水固化。要安装前端的 2 个螺丝,可从顶部穿过泡沫塑料戳 2 个孔。
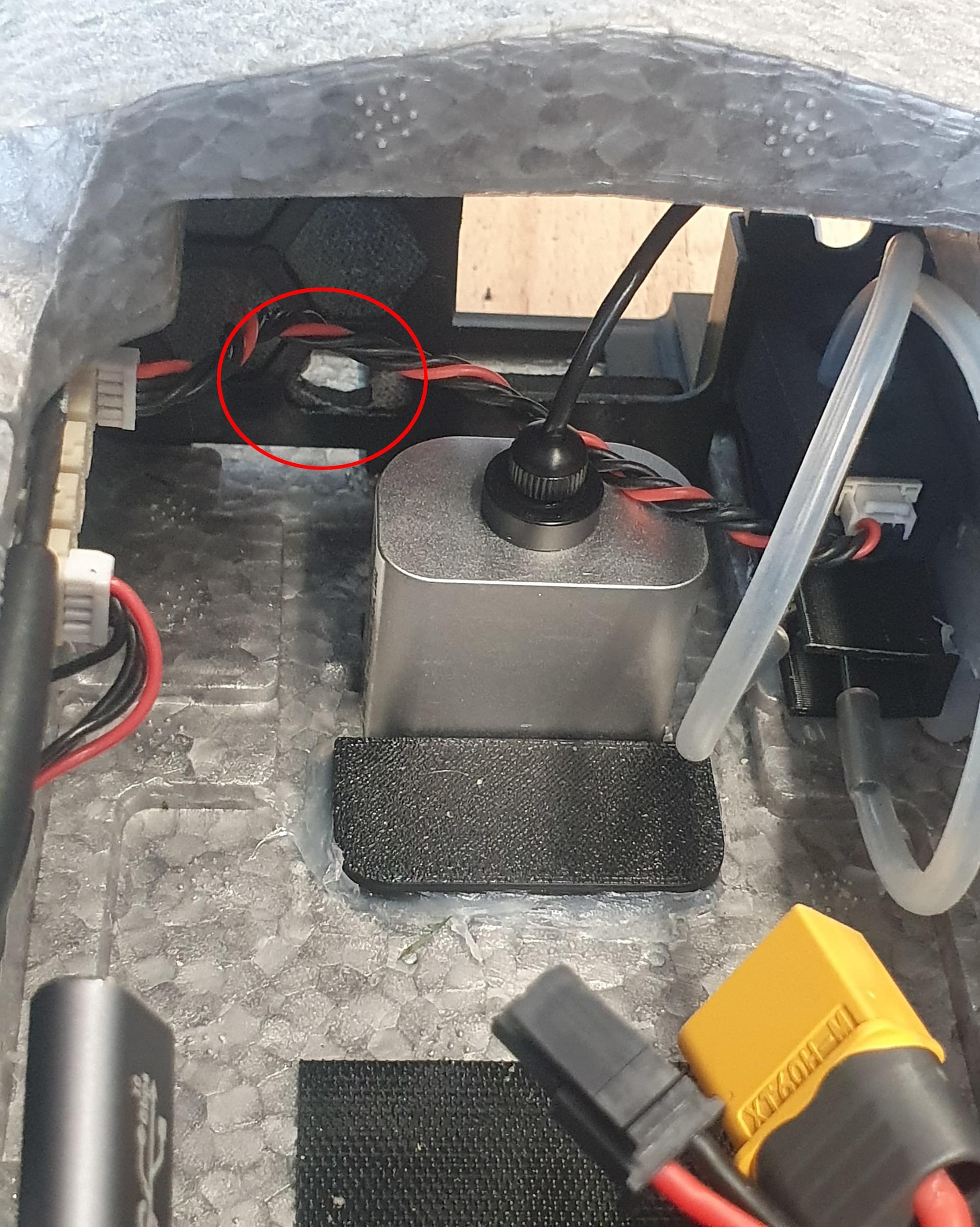
天线和遥控接收器
可在载具底部安装一根 LTE 天线。为此,您可以将天线线穿过电调散热器的开口。

第二根天线可安装在载具内部的电池仓左侧。遥控接收器也可安装在电池盒左侧。

软件设置
选择机身
打开 QGC,选择 Q 图标,然后选择 载具设置.
选择 机身 选项卡
选择 通用倾转旋翼机 VTOL 从 VTOL 倾转旋翼机 组,然后单击 应用和重启.
加载参数文件
接下来,我们加载一个 参数文件 该软件包含定义框架几何形状、输出映射和调整值的参数,因此您无需进行配置!如果您遵循了电机的接线说明,那么除了传感器校准和修正微调之外,您可能不需要做更多的配置。
加载文件:
传感器选择
空速传感器可以在 参数 标签。
- 如果 推荐使用空速传感器 (SDP33) 使用、
SENS_EN_SDP3X需要启用。 - 如果 Lidar Lightware lw20-c(包含在 Skynode 评估套件中) 使用、
SENS_EN_SF1XX需要设置为 6(SF/LW/20c)。
传感器校准
首先确保设置 飞行控制器的正确方向.这应该是默认值 (旋转_无).
然后校准主要传感器:
RC 设置
我们建议您为以下文件中定义的一组模式分配 RC 开关 飞行模式配置> 我应该设置哪些飞行模式和开关?.特别是,您应该为 VTOL 转换开关, 关闭开关和一个开关来选择 稳定模式 和 位置模式.
致动器设置
警告
确保螺旋桨已卸下!电机很容易在执行器选项卡中意外启动。
在 QGroundControl 中配置电机、控制面和其他执行器。 执行器配置与测试.
参数文件 之前加载的内容意味着该屏幕的设置应该已经正确:您只需根据具体载具的情况进行调整。如果电机/伺服器连接的输出端与建议的不同,则需要更改执行器输出端部分的输出端到功能映射。
倾斜伺服器
将飞行器切换到手动模式(通过飞行模式开关或键入
指挥官模式 手动进入 MAVLink 外壳)。检查电机是否朝上。如果电机指向前方,则需要反转相关的倾斜伺服器(选择每个伺服器旁边的复选框)。
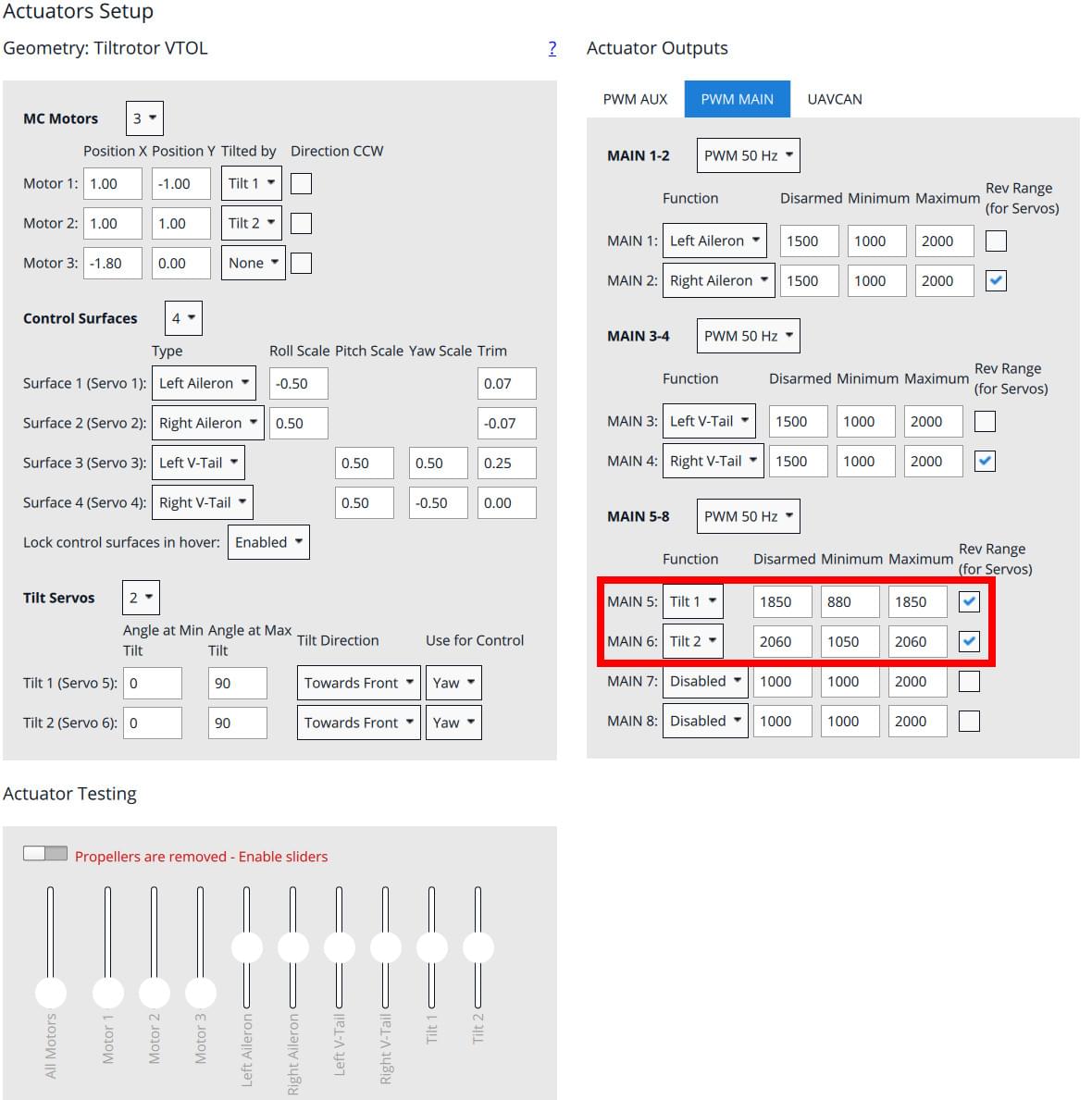
调整伺服器垂直向上指向的最小值或最大值。
然后键入
指挥官过渡在 MAVLink 外壳内调整水平位置。
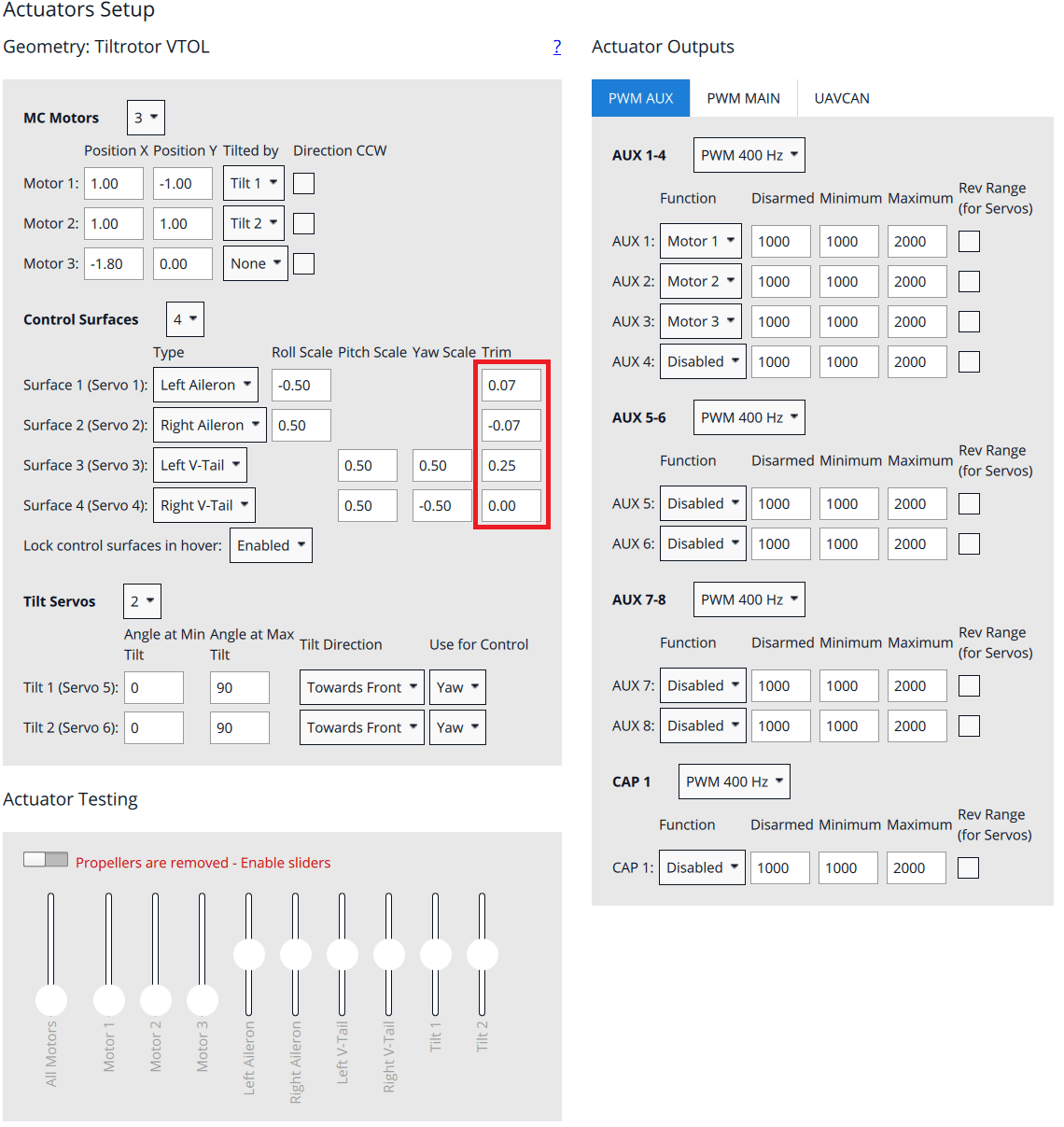
控制面
检查是否需要使用遥控控制器反转执行机构:
- 向右摇杆。右副翼应向上,左副翼应向下。
- 将杆向后倾斜(向上飞)。两个 V 形尾翼表面都应向上移动。
- 向右偏航。两个表面都应向右移动
现在调整微调值,使所有表面都处于中立位置。
电机方向和定位
确保道具已拆除
电机 1:左前电机应沿 CW 方向旋转电机 2:右前电机应沿 CCW 方向旋转电机 3:后电机应沿 CCW 方向旋转
如果电机旋转方向错误,则需要调换三根电机导线中的两根。方向不能通过软件更改,因为载具不使用 DShot ESC.
首次飞行
- 检查倾斜转子在 稳定模式.将油门杆保持在最小值,并将飞行器置于地面。要启用倾斜伺服器,您需要启动飞行器。
- 载具向右偏航(车头向右) ->;左侧电机应向下倾斜
- 向左偏转载具(车头向左) ->;右发动机应向下倾斜
- 安装螺旋桨。
- 检查重心 (GG)。将飞行器切换到前飞模式。要检查重心 (GG),请用两根手指抬起飞行器,放在机翼下方的标记处。飞行器应保持水平平衡。如果飞行器向尾部或鼻部倾斜,则需要将电池向相反方向移动。如果用这种方法无法平衡飞行器,则需要调整某些部件的位置或增加重量以平衡飞行器。
- 检查传动器方向和中位调整
- 检查控制面板在 稳定模式.将飞行器切换到前向飞行模式。
- 将载具向右翻滚。右副翼应向下。左副翼应向上。
- 将载具向上倾斜(车头向上)。两个升降舵都应向下。
- 向右偏转飞行器(机头向右)。两个升降舵都应向左。
- 如果一个 开关 使用时,确保其工作正常,不会在飞行中意外启动!
- 手臂 稳定模式 并检查电机是否响应命令,例如,向左滚动会增加右侧电机的油门
- 起飞 稳定模式 并进行一些基本操作
- 如果一切顺利,将在 位置模式 并在 50 米左右进行过渡。如果出现问题,尽快切换回多旋翼模式(使用过渡开关)。