直升机配置
本节包含以下相关主题 直升飞机 配置和调整。
支持的配置
支持直升机配置:
- 带有斜盘的单主旋翼由多达 4 个斜盘伺服器控制,机械非耦合尾旋翼由电调驱动。
- 带有斜盘的单主旋翼由多达 4 个斜盘伺服器控制,机械耦合尾翼由一个伺服器控制。
支持的飞行操作/功能:
- 与多旋翼飞行器相同。
- 在编写本报告时,还不可能使用负推力进行自主/制导 3D 飞行。
设置
设置和配置直升机:
选择直升机 机身 在 QGroundControl 中。在编写本报告时,只有 通用直升机(尾部电调) 在直升机组中。这将为直升机机架配置一个机械非耦合尾翼(......)。CA_AIRFRAME:
10: 直升机(尾部电调)).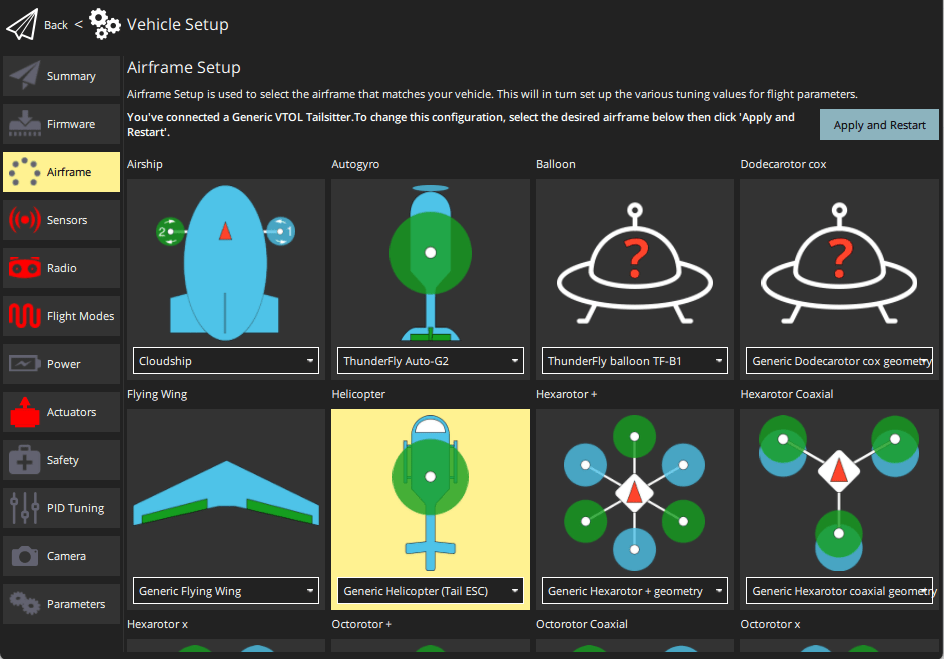
信息
带尾翼舵机的直升机没有单独的机身。要选择这种配置,请设置参数 CA_AIRFRAME 至 直升机(尾部舵机).然后,执行机构配置屏幕将更改为支持该框架类型。
配置直升机推杆的几何形状 载具设置> 执行器.
信息
大多数机架的致动器设置和测试都包含在以下内容中 致动器.虽然下文会提到,但这是直升机设置信息的主要主题。
几何形状 通用直升机 - 带尾部电调 如下所示。
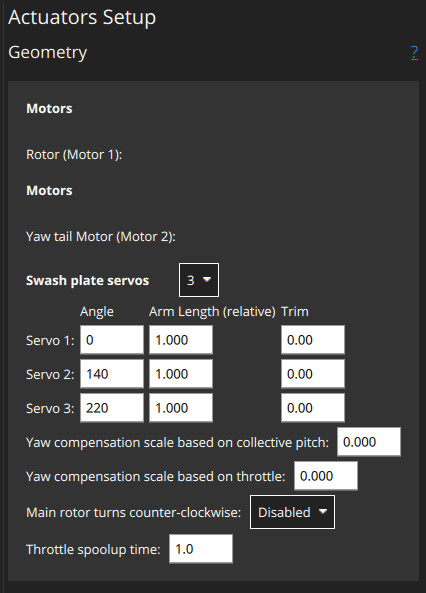
电机没有可配置的几何形状:
转子(电机 1):主转子偏航尾翼电机(电机 2):尾旋翼
斜盘伺服器
3|4每套伺服系统
角度:以度为单位的斜盘圆周顺时针角度,伺服臂从该角度开始连接0指向前方。例如,在一个典型的设置中,三个舵机控制斜盘,它们在圆周上平均分布(360°/3 =),每个舵机相距 120°,从而产生以下角度:# 角度 伺服 1 60° 伺服器 2 180° 伺服 3 300° 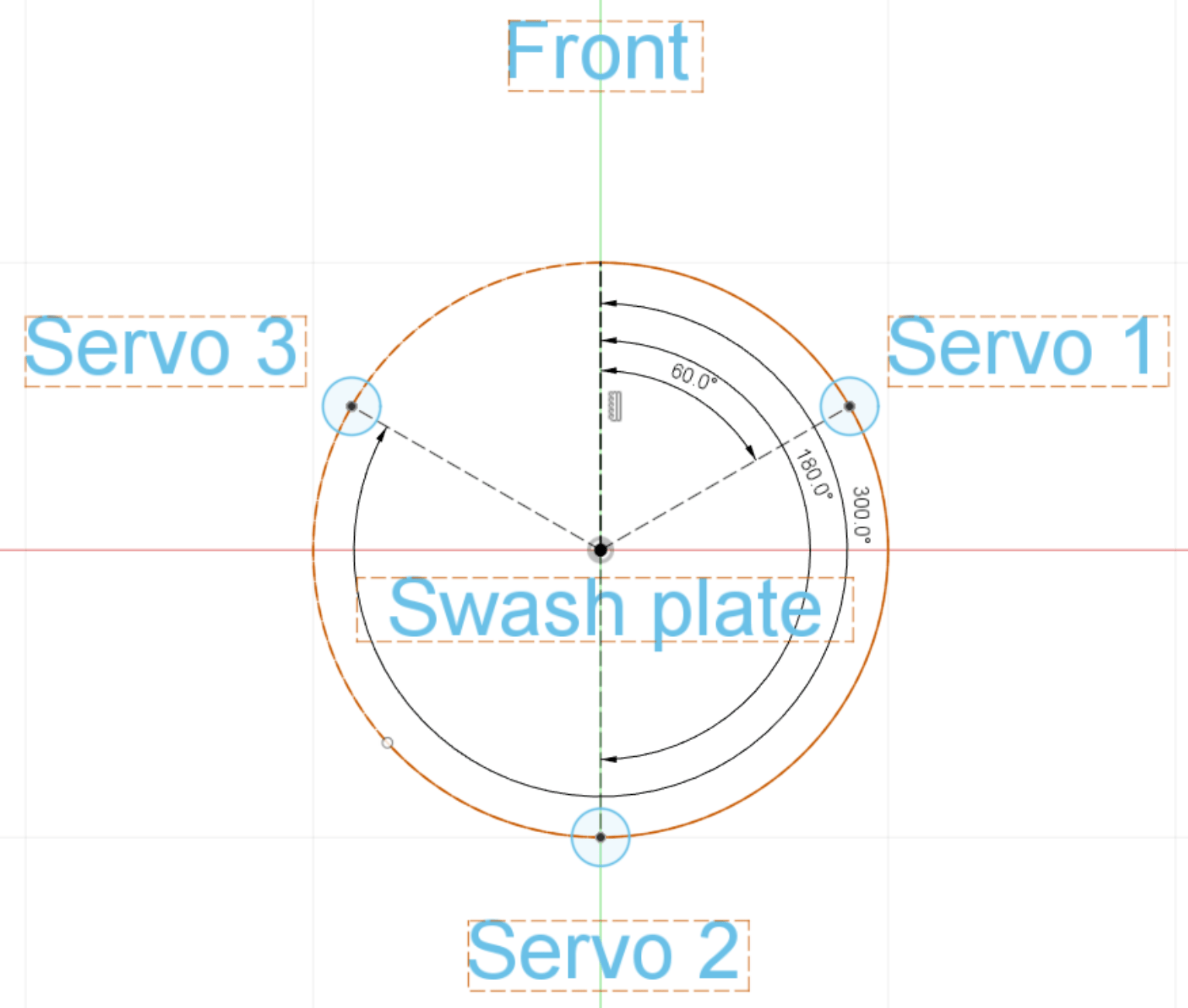
臂长(相对于彼此):斜盘中心半径(俯视图)。臂越短,意味着相同的伺服运动对斜盘的移动越大。这就允许自动驾驶仪进行补偿。修剪:偏移单个舵机位置。只有在所有舵机都居中但斜盘不平的罕见情况下才需要这样做。
其他设置:
基于集体俯仰的偏航补偿比例:根据当前的集合螺距前馈补偿偏航的程度。主转子逆时针转动:失能(顺时针旋转已启用节气门启动时间:设置值(秒)大于可实现的最短电机启动时间。数值越大,用户体验越好。
拆下旋翼和螺旋桨
将电机和伺服分配到输出端并进行测试(也可在 执行机构配置):
- 指定 将电机和伺服系统连接到输出端.
- 用蓄电池为载具供电,并使用 执行器测试滑块 以验证伺服和电机的分配和方向是否正确。
在 Acro 模式请检查斜盘的移动是否正确。对于大多数机身,您需要查看以下内容:
- 将滚动杆向右移动,可使十字盘向右倾斜。
- 将俯仰摇杆向前移动,可使十字盘向前倾斜。
如果您的机身需要任何相位滞后角偏移,只需将其添加到所有斜盘伺服角度中即可。请参阅机身制造商的相关文档。
启动载具并检查主转子是否缓慢旋转。根据需要通过参数 com_spoolup_time.您还可以通过参数 CA_HELI_THR_Cx.默认为恒定最大油门(适合大多数设置)。
再次解除警报并关闭电源。
装上转子叶片,为载具提供动力。
使用参数配置集体螺距曲线 CA_HELI_PITCH_Cx.根据所需的最小和最大叶片角度设置最小和最大值。确保最小值足够低,以便载具仍能下降。不要一开始就设置过低的值。因此,默认值略微偏负,应该是一个不错的起点。
调音
完成前面的步骤后,就可以安装刀片进行上膛了。
首先调整 速率控制器 和 偏航补偿 如以下各节所示(这些都是直升机专用的)。
然后,姿态、速度和位置控制器的调整将在 与多旋翼飞行器相同.
请注意,(在编写本报告时)不支持/测试自动调整。
偏航补偿
由于偏航力矩补偿对直升机稳定悬停至关重要,因此首先需要对其进行粗略配置。一旦速率控制器达到预期工作状态,本章将再次讨论如何进行精确调整。
最重要的是设置主旋翼的旋转方向,从机身上方看,默认为顺时针方向。如果您的主旋翼是逆时针旋转,请设置 ca_heli_yaw_ccw 至 1。
主旋翼和节流阀有两个偏航补偿参数: ca_heli_yaw_cp_sca_heli_yaw_th_s
当尾桨的正推力使飞行器的旋转方向与主旋翼的旋转方向相反时,需要负值。
费率控制器
速率控制器应调整为 Acro 模式但也可以在 稳定模式 如果您不能使用 Acro 模式飞行。
开始时禁用速率控制器增益,只使用少量前馈:
吁停止 设置 MC_ROLLRATE_P 0 停止 设置 MC_ROLLRATE_I 0 停止 设置 MC_ROLLRATE_D 0 停止 设置 MC_ROLLRATE_FF 0.1 停止 设置 MC_PITCHRATE_P 0 停止 设置 MC_PITCHRATE_I 0 停止 设置 MC_PITCHRATE_D 0 停止 设置 mc_pitchrate_ff 0.1缓慢起飞并提供一些滚动和摇杆动作。使用 QGC 调整参数 UI 检查响应:
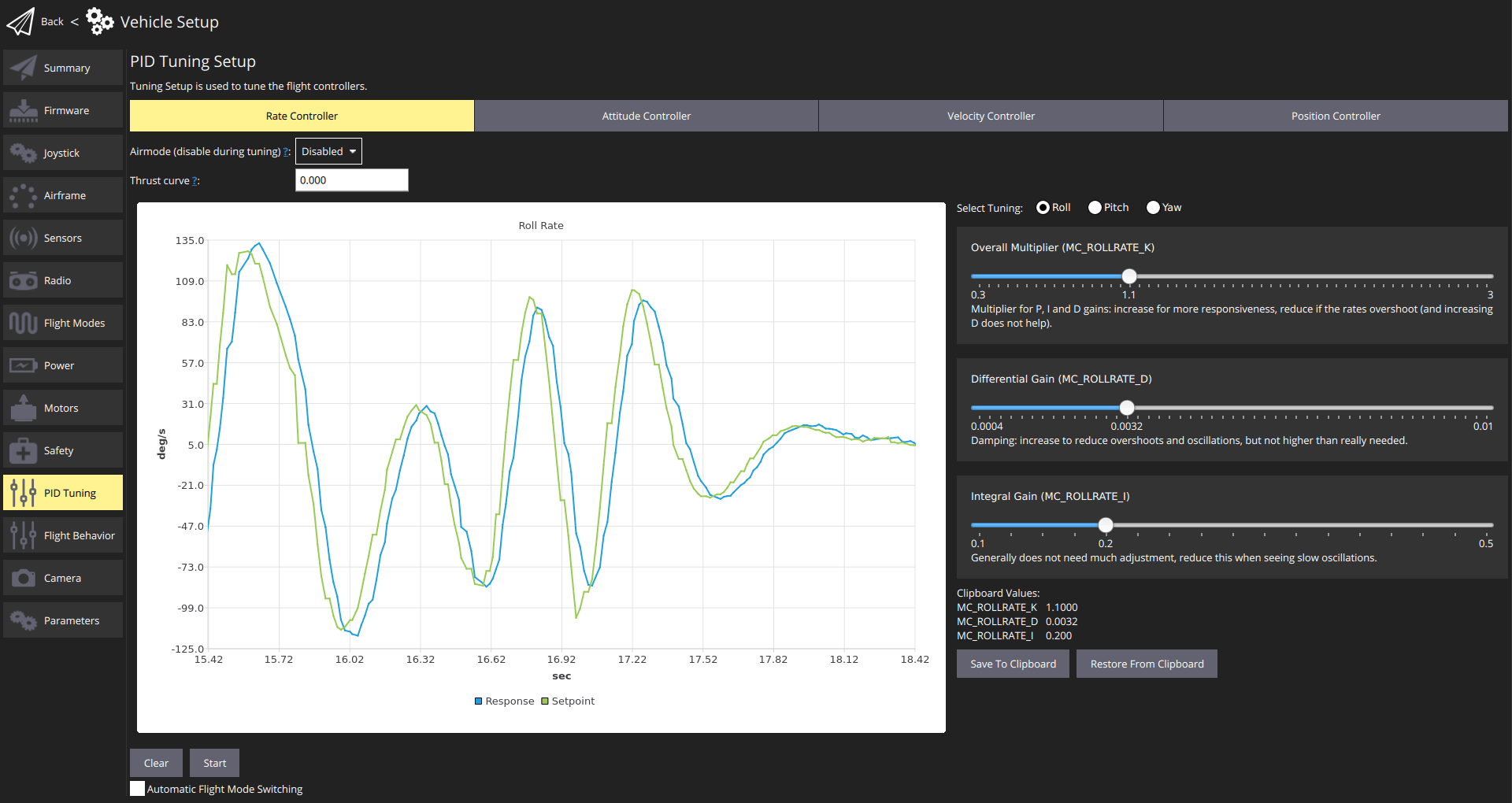
提高滚转和俯仰前馈增益 MC_ROLLRATE_FF, mc_pitchrate_ff 直到输入阶跃输入时响应达到设定点。
然后启用 PID 增益。开始时使用以下值:
- MC_ROLLRATE_P, MC_PITCHRATE_P 你在上一步中发现的相应前馈值的四分之一。
P = FF / 4
吁停止 设置 MC_ROLLRATE_I 0.2 停止 设置 MC_PITCHRATE_I 0.2 停止 设置 MC_ROLLRATE_D 0.001 停止 设置 MC_PITCHRATE_D 0.001然后增加
P和D根据需要进行增益,直到跟踪良好为止。预计P增益远远小于FF收益。- MC_ROLLRATE_P, MC_PITCHRATE_P 你在上一步中发现的相应前馈值的四分之一。