建造爬行龙 2 (RD2)
Reptile Dragon 2 是一款双马达遥控飞机,专为高效的 FPV 而设计。 (第一人称视角) 飞行。作为 FPV 的专用机型,RD2 经过了优化,可以方便地安装摄像头、传感器、逻辑电子设备、大容量电池、天线和其他有效载荷组件,这些组件通常会出现在 FPV 飞机上。这种对有效载荷的重视使 RD2 成为安装 PX4 的理想选择。


概述
这次建造的目标是创建一个高效、耐用的 FPV 平台,用于 PX4 的一般测试和开发。
机身主要特点
- 宽敞的内部空间
- 通过大型顶部舱门可轻松进入整个机身空腔
- 后舱门
- 包括可拆卸的 V 形尾翼或传统尾翼选项
- 机翼和机身顶部的螺纹嵌入件用于外部安装
- 多种安装功能
- 顶部天线孔
- 顶部 GPS 盖
- 侧面 "T" 天线安装座
- 后电子设备托盘
- 面向前方的 "action cam" 切口
- 前置 FPV 摄像头开孔
- 可拆卸机翼
- 失速速度低
- 轻柔操作
主要建造功能
- 整体结构简单
- 轻松访问 Pixhawk 和所有外设
- 带摄像机摇摄支架的 FPV
- 来自皮托管/静态探头的空气数据
- ~40 分钟的超长飞行时间
零件清单
Holybro PWM 分线板
MS4525DO 差压模块和皮托管
6s2p 18650 锂离子飞行电池 (选择 XT60 连接器)
- ARK6X 支架
- Holybro Pixhawk 5x 载体支架
- FPV 吊舱和相机支架
- 皮托管静态探头"插头"适配器
其他硬件M3 硬件(支座、垫圈、O 型环、螺栓)、M2.5 尼龙支座和螺钉、XT30 连接器、热胶、热缩管、Molex Microfit 连接器
硅胶接线(14 号线用于大电流,16 号线用于小电流,22 号线用于小功率和信号)
工具
装配过程中使用了以下工具。
- 伺服测试仪(带对中按钮)
- 螺丝刀套装
- 三轴打印机
- 扳手套件
- 胶水:热胶、CA(氰基丙烯酸酯)胶水、"Foamtac"胶水
- 砂纸
机身制造
飞机开箱后需要进行一些组装。需要安装舵机、机翼和尾翼。
信息
对于这部分组装工作,套件随附的说明应该足够了,但下面列出了一些有用的提示。
粘合泡沫
将 RD2 的泡沫部件粘合在一起时,先用砂纸打磨配合表面,然后使用 CA 胶水。如果没有用砂纸打磨泡沫,胶水就没有表面,无法抓住泡沫,粘合效果就会很差。
Foamtac 似乎不能很好地粘在这种泡沫上,因此我使用 CA 胶水来粘合所有泡沫与泡沫之间的连接。
防滑板
需要对 RD2 附带的防滑板进行修剪,以便安装。

从防滑板的平整面上修剪掉模子上的闪边。用粗砂纸打磨防滑板的内表面以及机身底部的接合面。检查无误后,使用 CA 胶水将防滑板粘到 RD2 的底部。
伺服器安装
信息
在安装舵机之前,建议使用砂纸打磨舵机面向舵机盖的一面。最后安装时,在舵机和盖子之间滴一滴 Foamtac。这将防止伺服器在安装后移动。
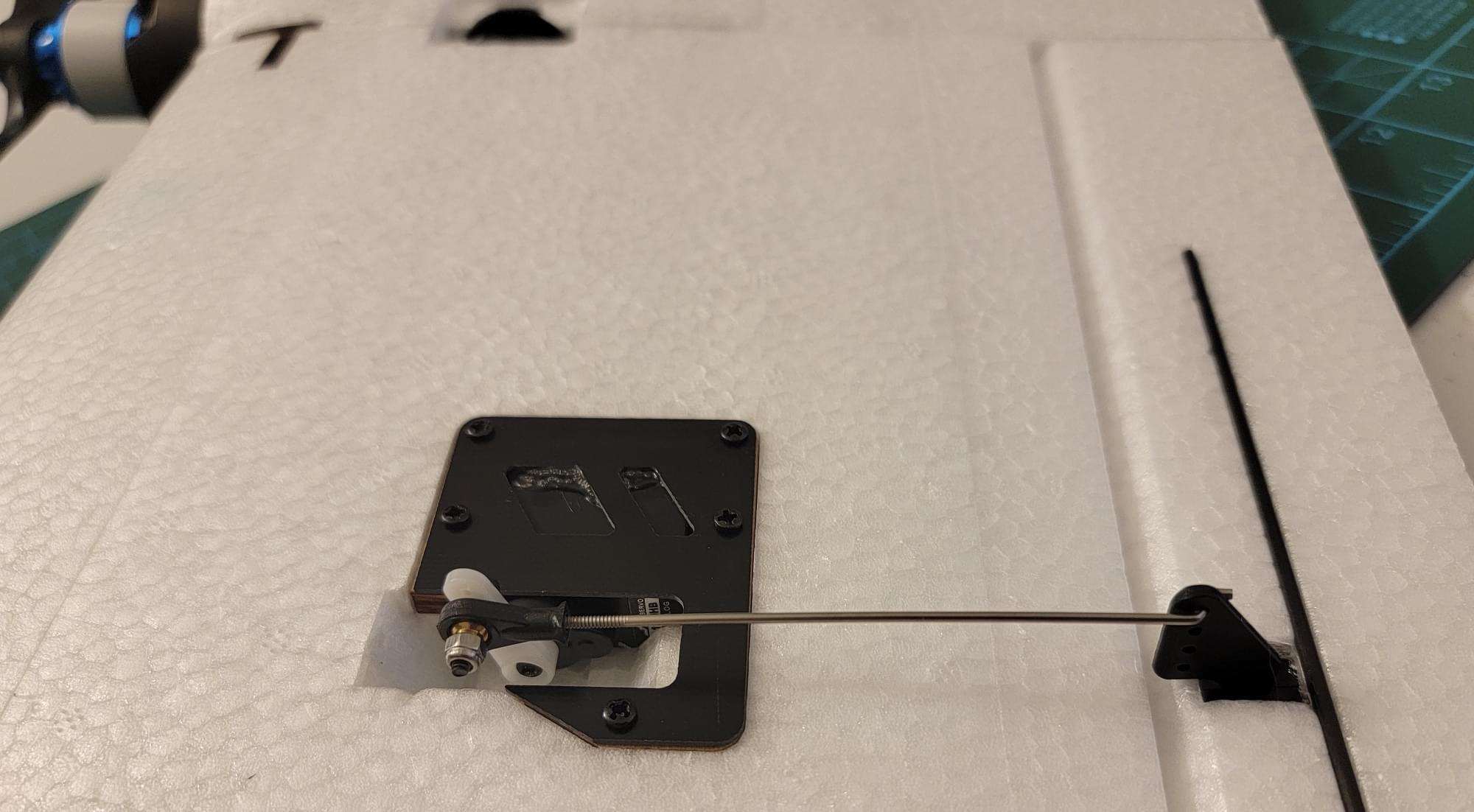
RD2 上的舵机通过可调舵机连杆连接到控制面。RD2 的说明书会注明每个控制面使用特定长度的连杆(包含在套件中)。安装前,请务必测量每个连杆,以确保连杆长度适合该控制面。对齐舵机非常重要,这样舵机的机械范围才能与控制面的机械范围完全一致。当舵机处于中心点时,舵机臂应与舵机成 90 度角,控制面应大致居中。可能无法实现完美的对齐,因此任何剩余的偏移都将通过软件进行调整。
以下步骤可用于执行伺服对齐:
- 从飞机外部的伺服器开始
- 使用伺服测试仪将伺服移动到其中心点
- 用随附的固定螺钉安装舵机角,注意对准舵机角,使其在舵机的正确一侧尽可能向外延伸 90 度。
- 将舵机安装到飞机的舵机袋中
- 安装连杆,并扭转调整连杆,使控制面尽可能接近中心位置
信息
由于舵机轴上的齿,舵机角可能不会与舵机成 90 度角。您可以从上面的示例设置图片中看到这一点。只要使其足够接近 90 度,剩余的偏移将通过连杆或稍后的软件消除。
GPS/Compass 模块安装
GPS/ 指南针应安装在 RD2 附带的后电子设备架上。该位置远离电源线(以及其他可能造成磁场干扰的东西),是 GPS/指南针模块的理想位置
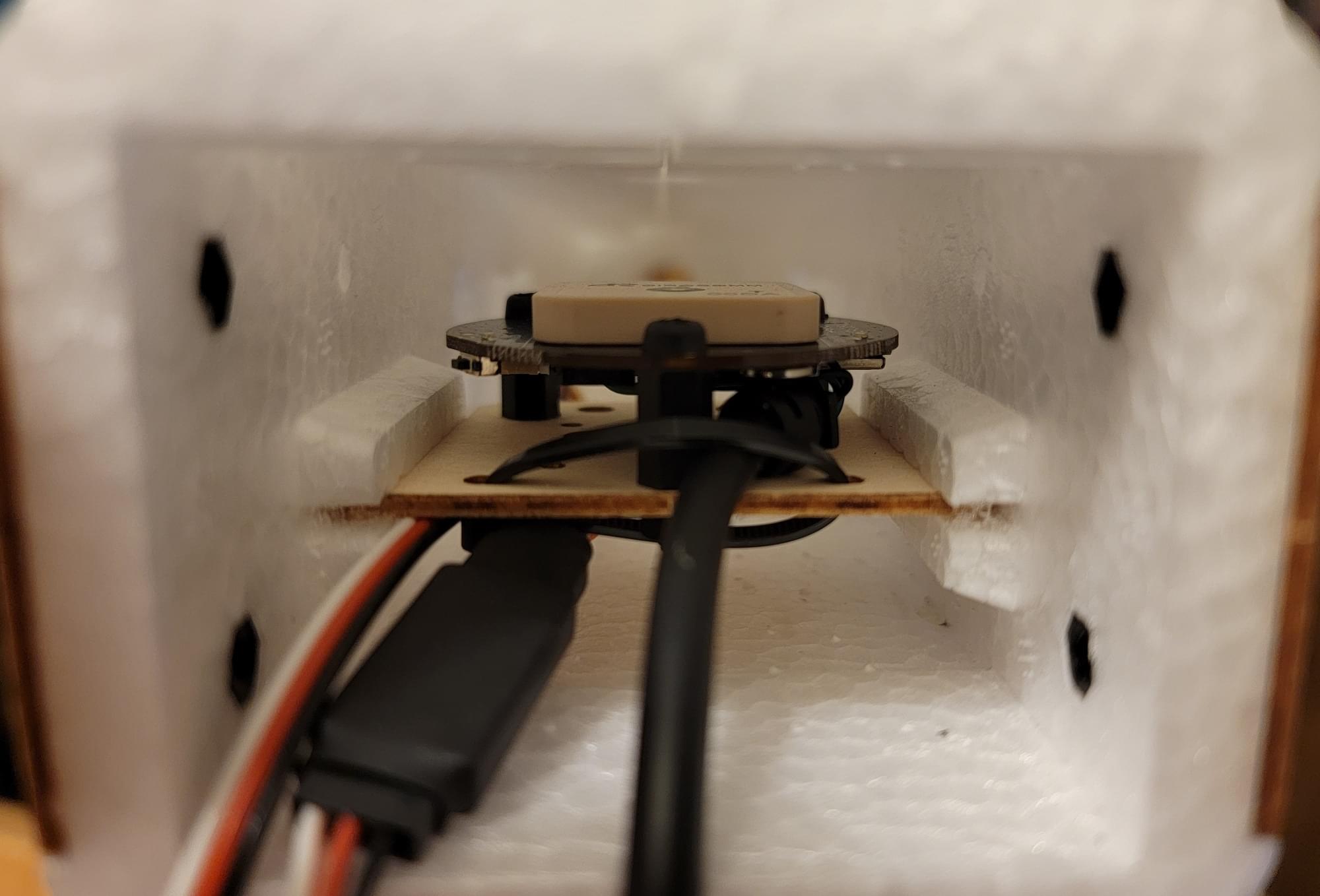
可以将 GPS 模块从塑料盒中取出,以便使用安装孔。然后使用尼龙 M3 五金件将其安装到后电子设备架上。
所需的三个孔中有两个已经恰好位于电子设备托盘上,因此我用记号笔和钻头标记并钻了第三个孔。
FPV 吊舱
FPV 吊舱组件
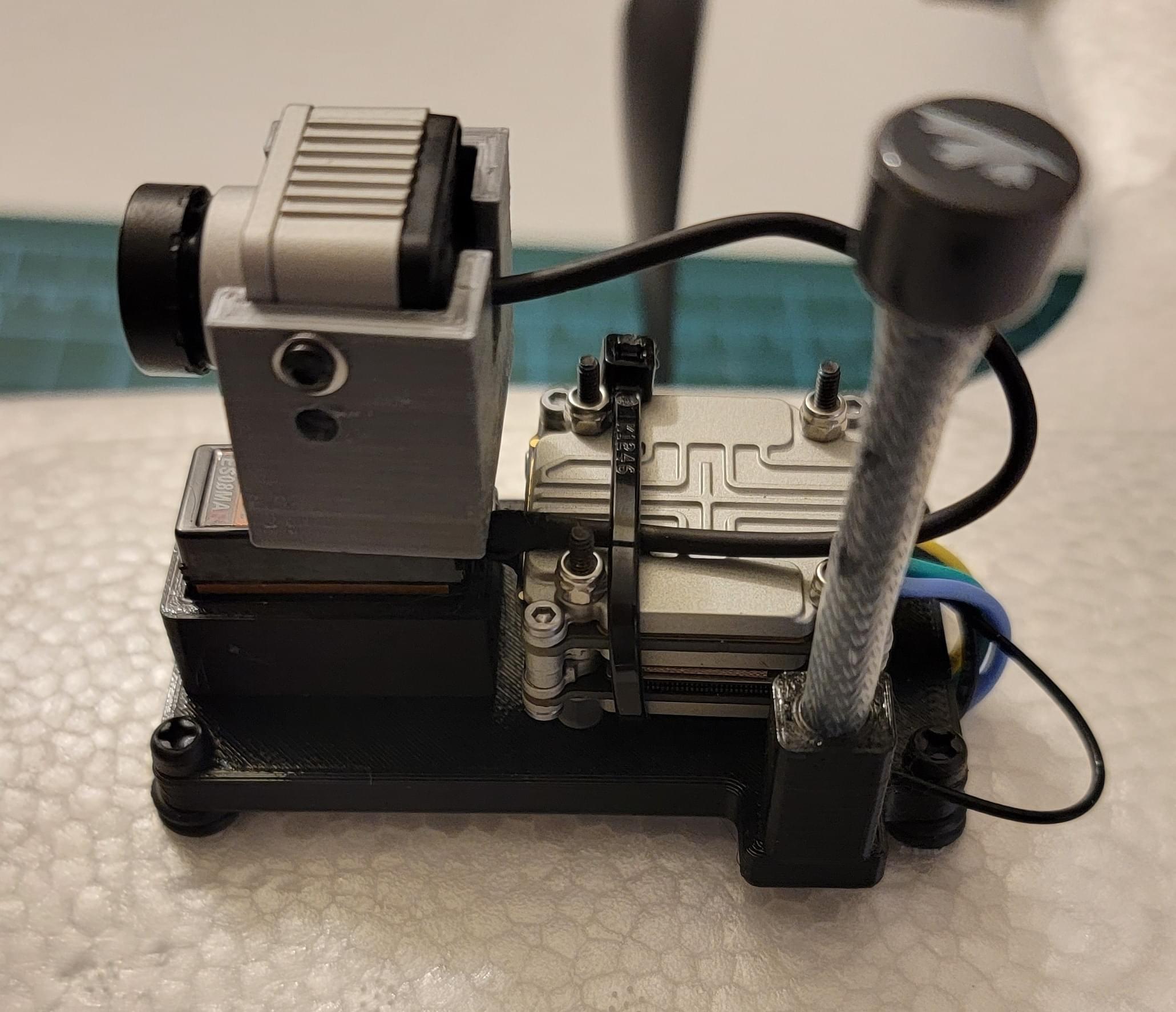
首先,将 ES08MA ii 伺服器安装到 FPV 吊舱的伺服器袋中。舵机只需滑入即可,缆线通过舵机袋上的孔从 FPV 吊舱中排出。用一点 Foamtac 胶水固定舵机。
使用 ES08ma ii 包装中的一个舵机角。剪切舵机角,使其与 FPV 吊舱相机托架的插槽相匹配。它应与插槽底部齐平。用 CA 胶水固定舵机角。
使用伺服测试仪将伺服器对中。将相机托架舵机角直接安装到舵机顶部,并用随附的螺钉将其固定。用两侧的螺钉将 DJI FPV 摄像机固定在支架上。
完成 FPV 吊舱组装后,使用长 M2 螺栓、1 毫米支座和尼龙螺母将 Caddx Vista 安装到吊舱背面。
FPV 吊舱机身安装
FPV 吊舱安装在电池舱盖顶部,使用尼龙 M3 螺栓和两个 O 形环将 FPV 吊舱底板与电池舱盖隔开。
飞行计算机安装
信息
此构建与 ARK6X 载具和 Holybro 5X 载具兼容。两者都提供了使用说明。
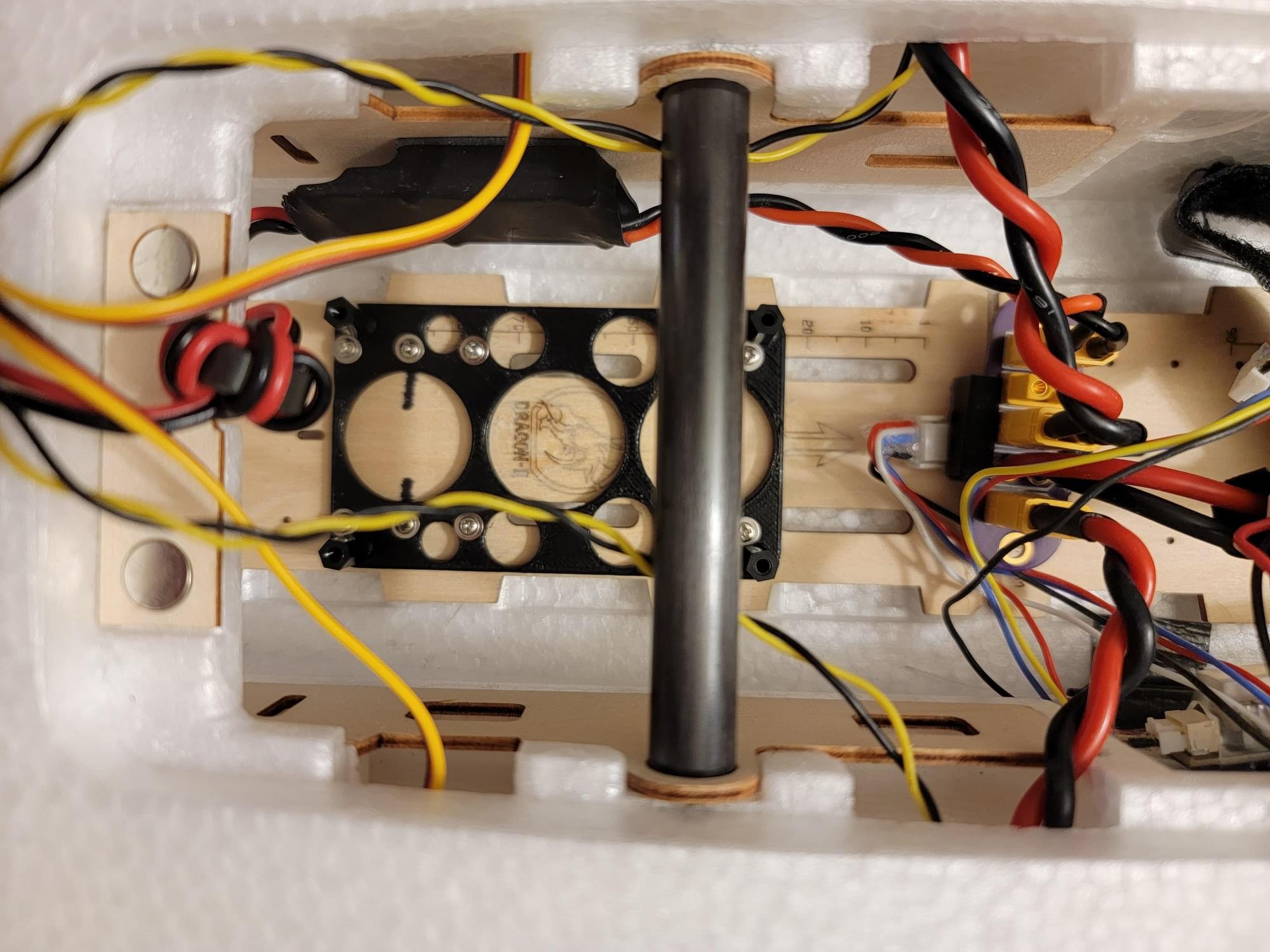
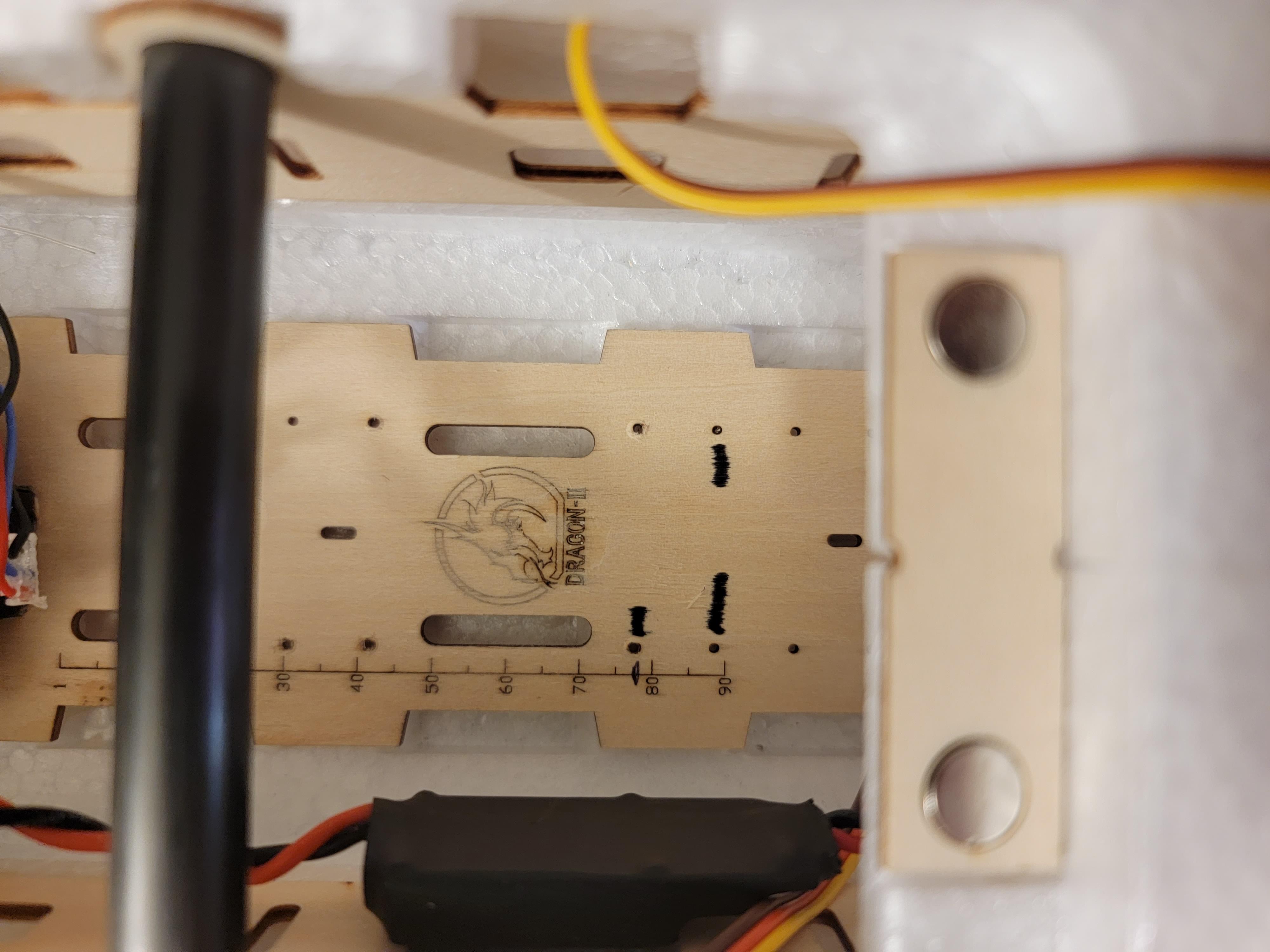 RD2 的机身上预先粘贴了一块木质电子设备支架底板。在这张图片中,两组标记刻度用来指示每个载具支架的安装位置;单刻度表示 Holybro 5X 载具支架,双刻度表示 ARK5X 载具支架。
RD2 的机身上预先粘贴了一块木质电子设备支架底板。在这张图片中,两组标记刻度用来指示每个载具支架的安装位置;单刻度表示 Holybro 5X 载具支架,双刻度表示 ARK5X 载具支架。
ARK6X 航母(推荐使用)
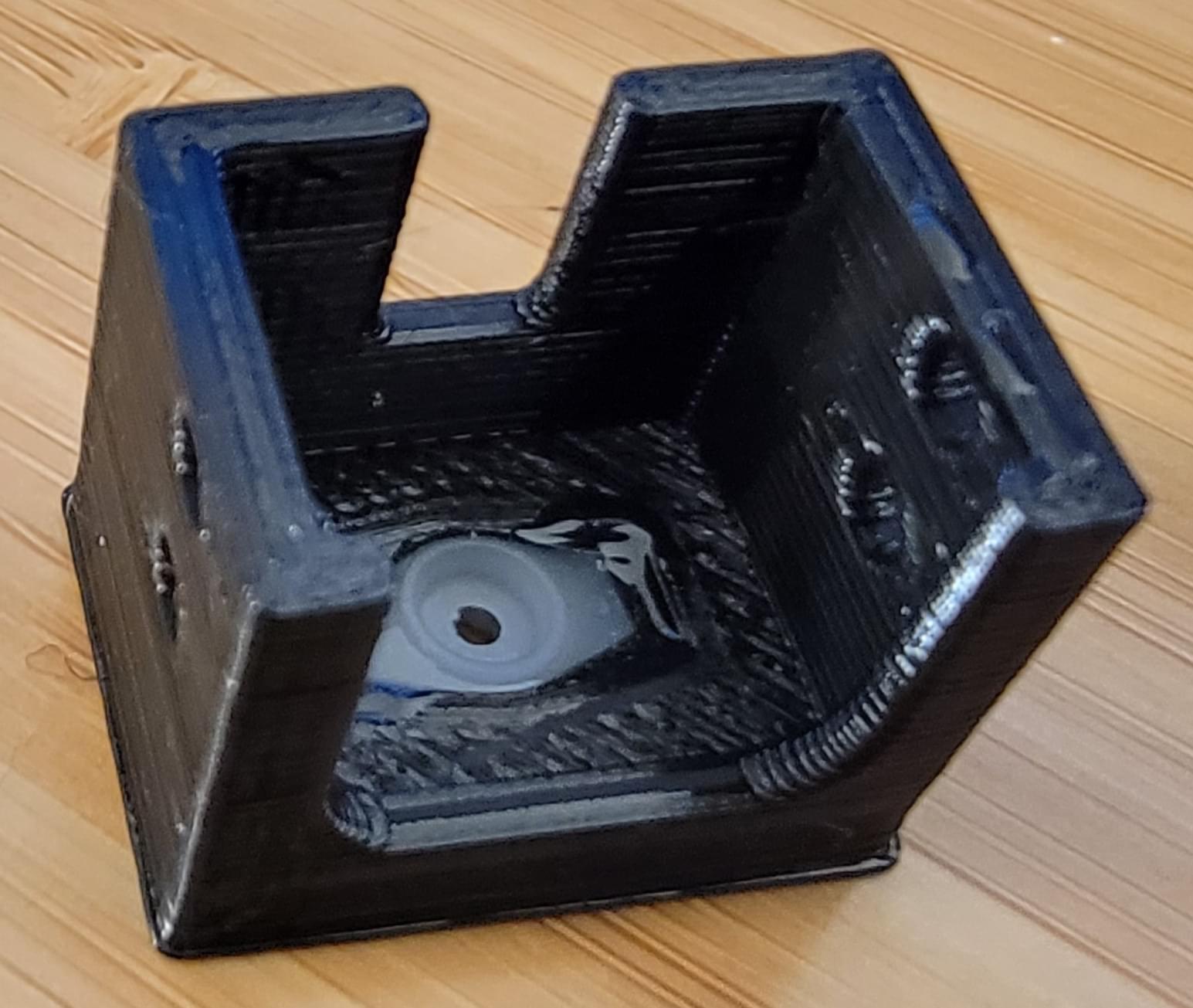
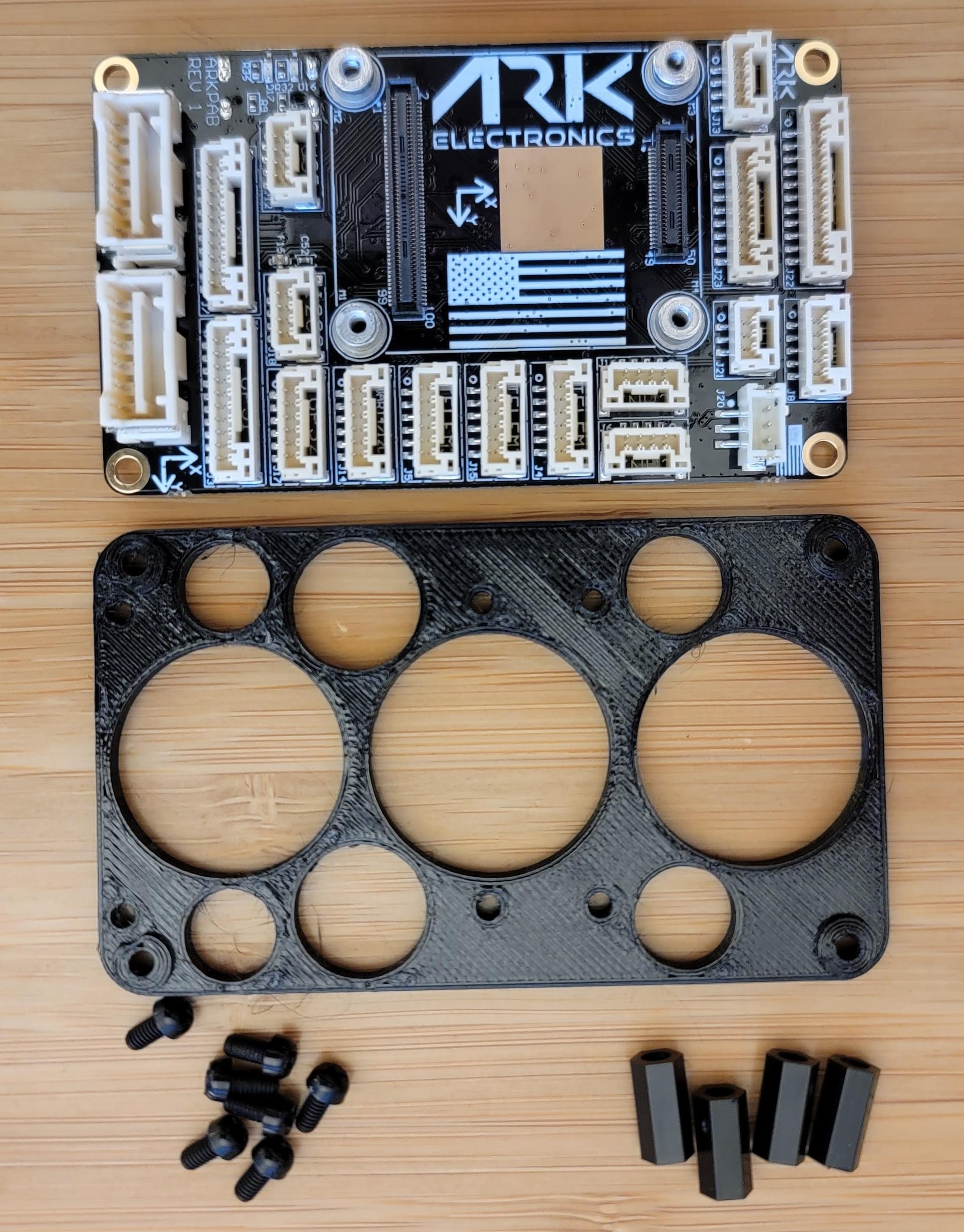
为 ARK6X 支架定制了一个 3D 打印支架。使用 M2.5 尼龙硬件将 ARK6X 支架固定在支架上。
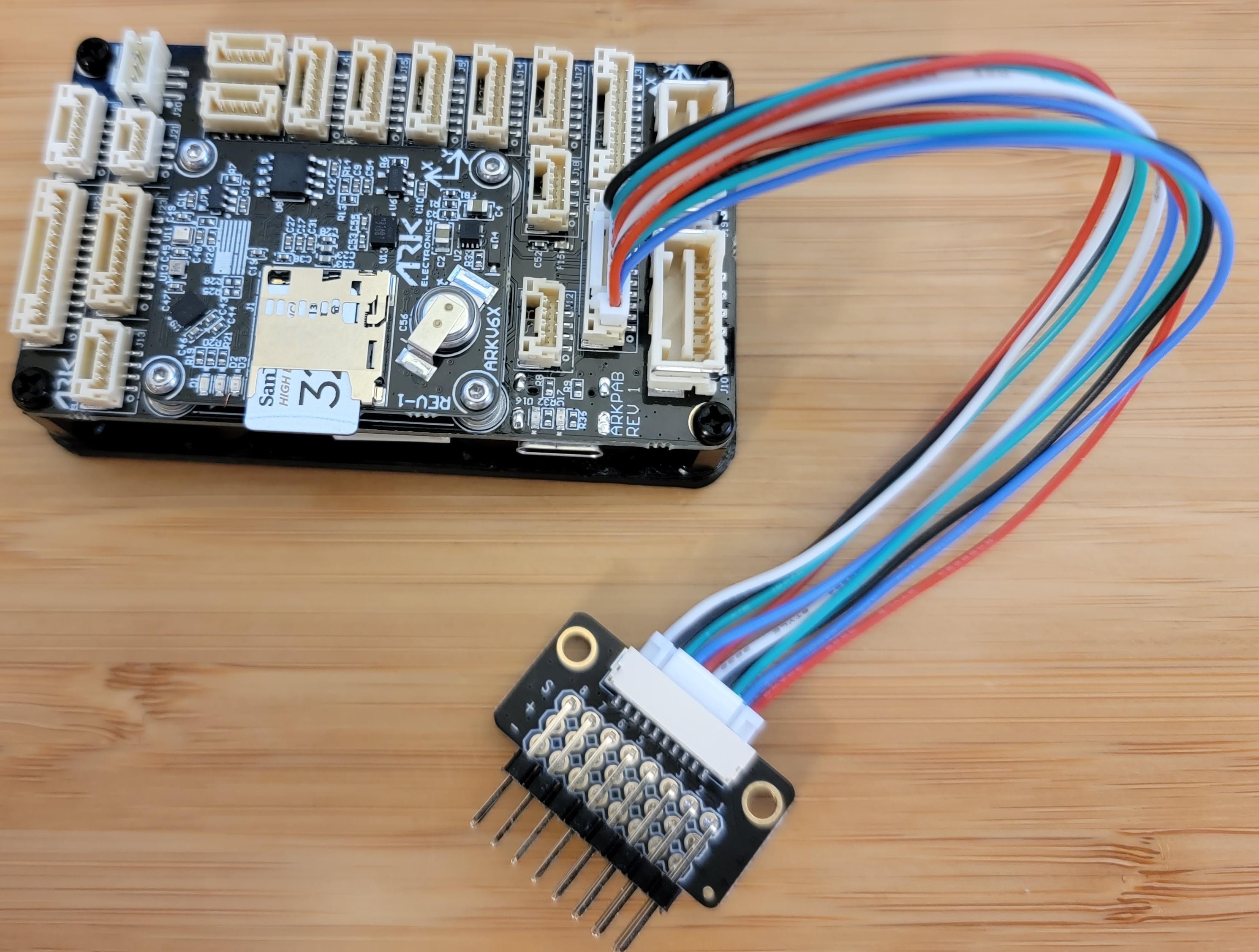
ARK6X 载体没有普通的伺服输出连接器。取而代之的是一个 JST GH 连接器,用于连接 8 个 FMU 伺服输出。我们使用了一块 Holybro PWM 分线板,将单个 JST GH PWM 输出连接器分成 8 个单独的伺服通道。
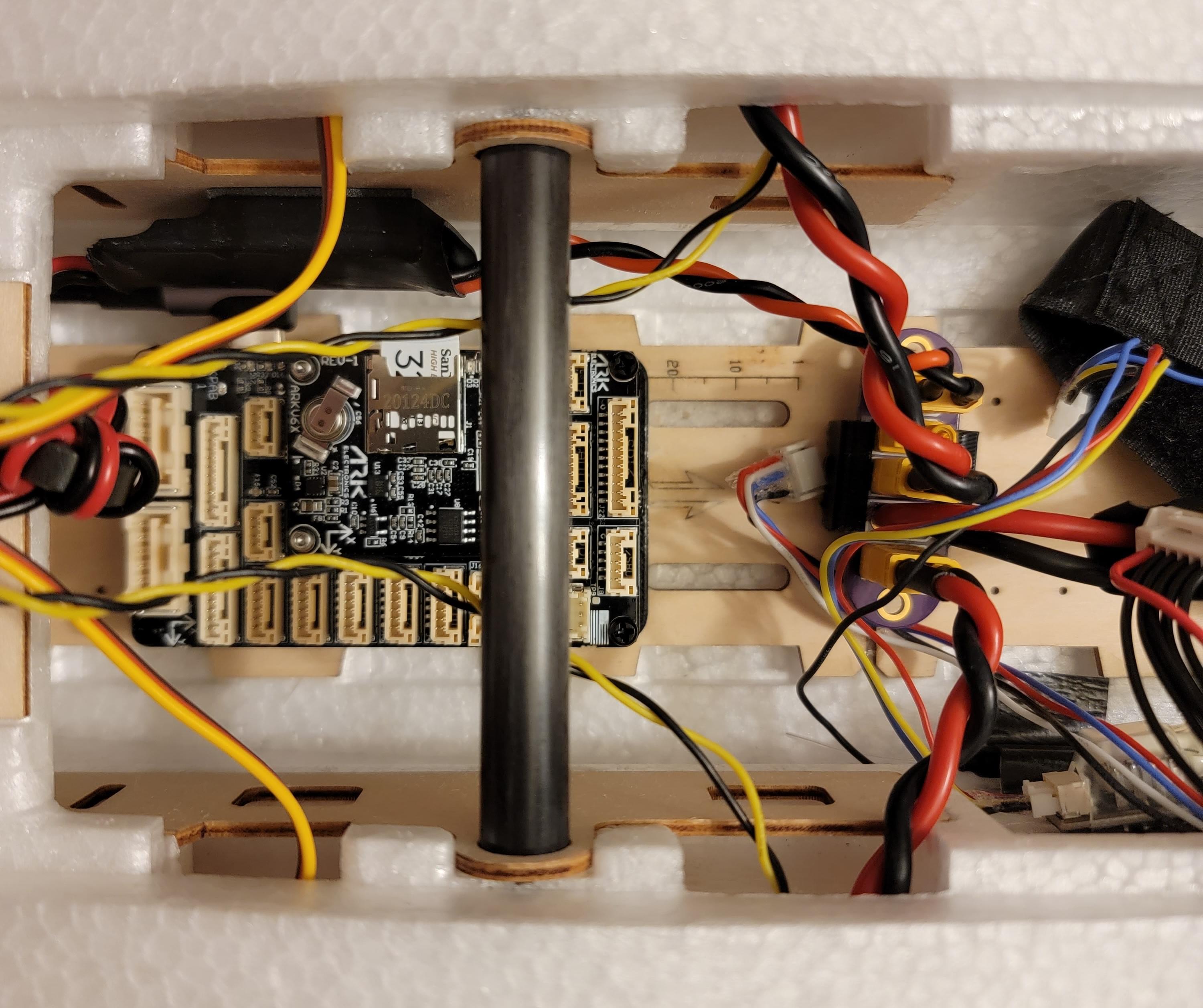
这里显示的是安装在底板上的 ARK6X 托架。注意托架后端对准两个刻度线。
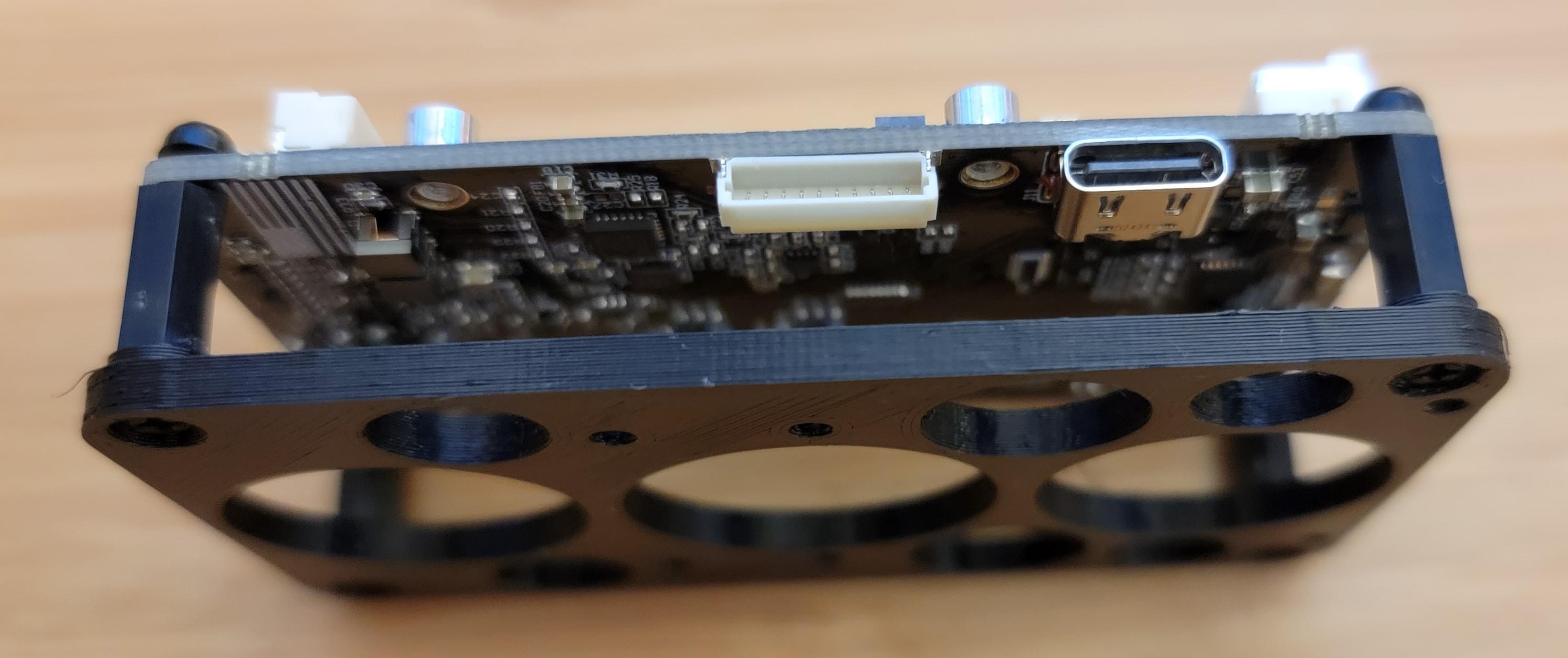
最后,将 ARK6X 安装在支架顶部。
Holybro 5X 载体(可选)
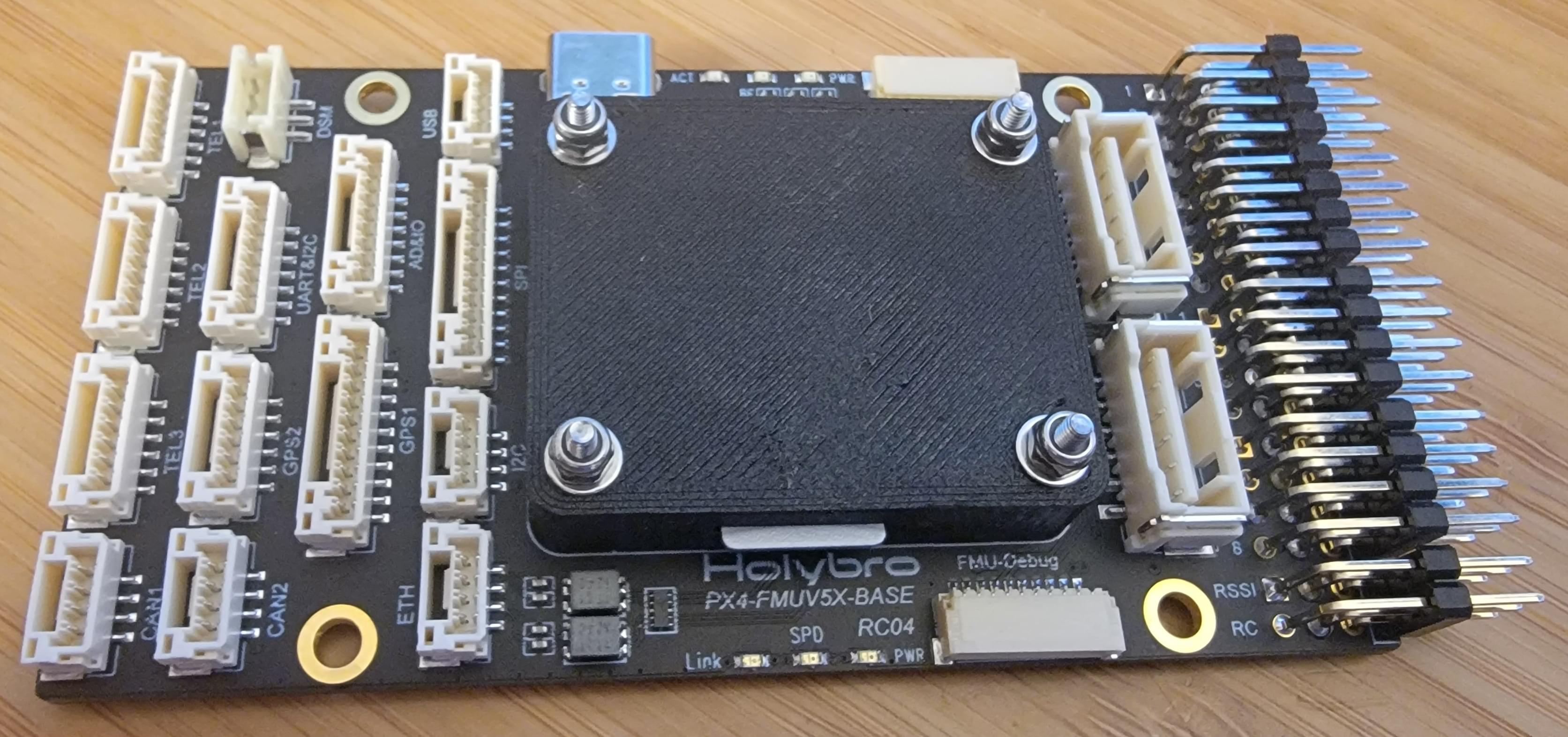
另一种载板是 Holybro Pixhawk 5X 载板。
载体安装在一个塑料盒中。虽然塑料盒看起来不错,但重量却很重,因此我们将载体从塑料盒中取出。从箱子中取出后,安装了 ARK6X,并在上面安装了保护盖。
为 Pixhawk 5X 载板设计并 3D 打印了一个定制支架。该支架将 RD2' 内部安装板的孔型与 Pixhawk 5X 载板上的安装孔相适配。
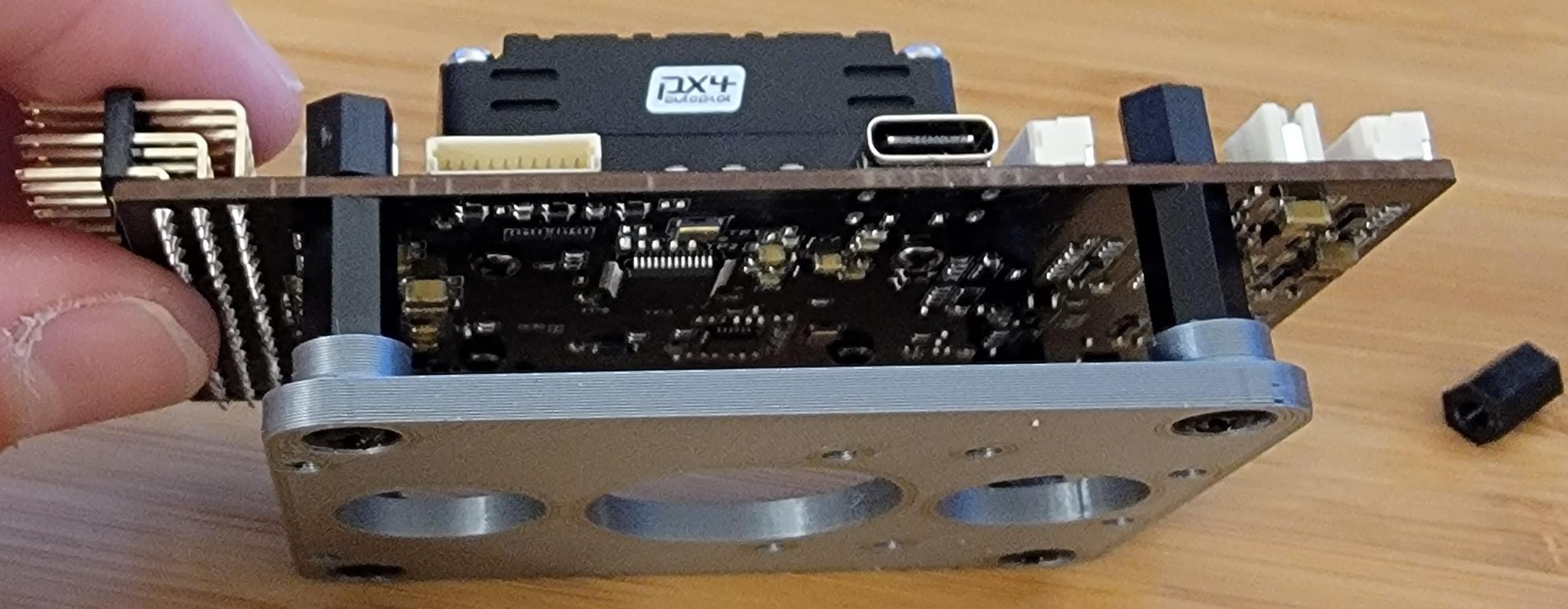
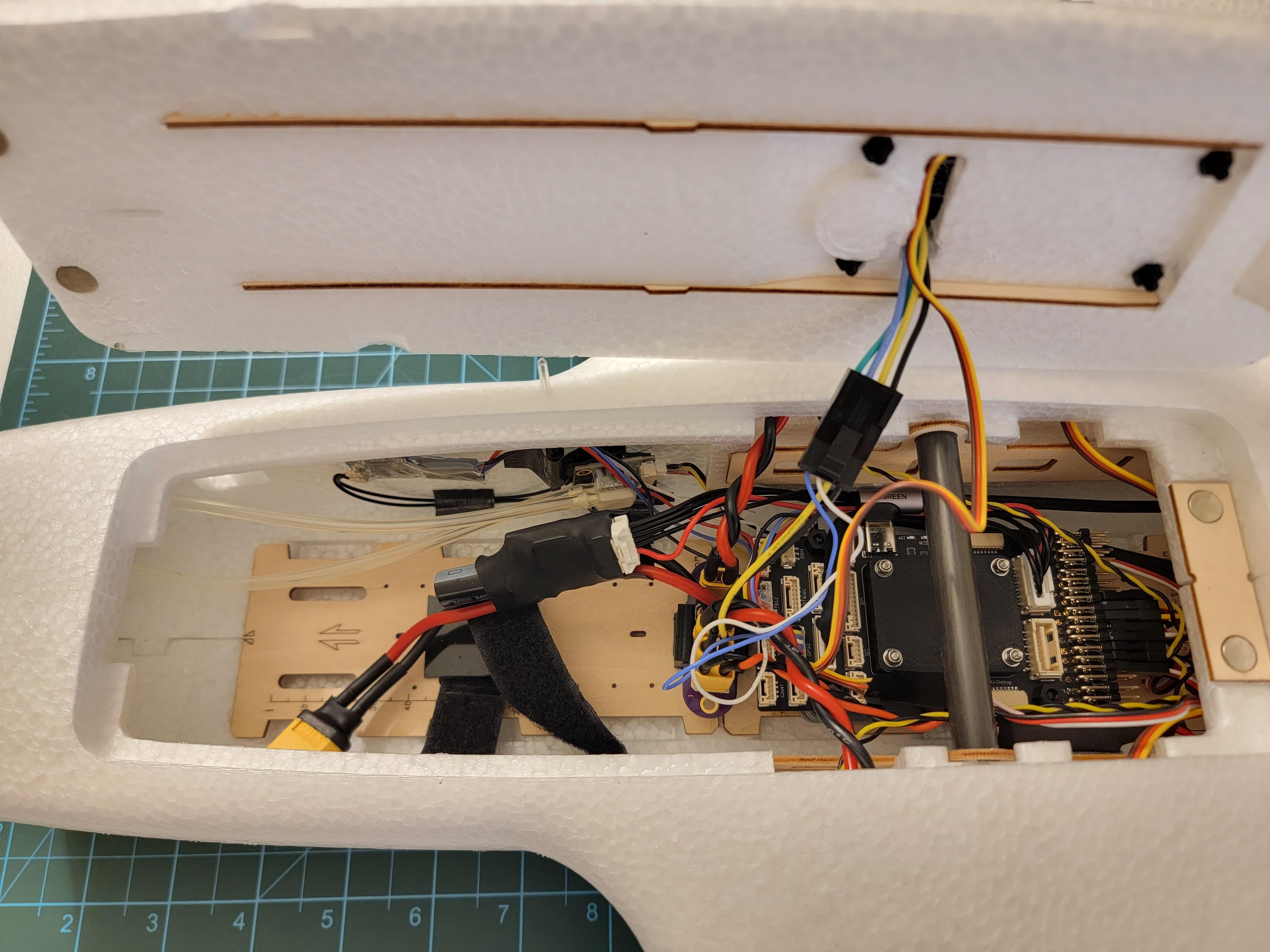
重要的是要将此支架安装在 RD2 内部的正确位置;尽可能靠后。由于大型电池和 FPV 吊舱位于前方,飞机会倾向于机头偏重。将飞行计算机安装在机尾将有助于将机身重心 (CG) 保持在正确的位置。
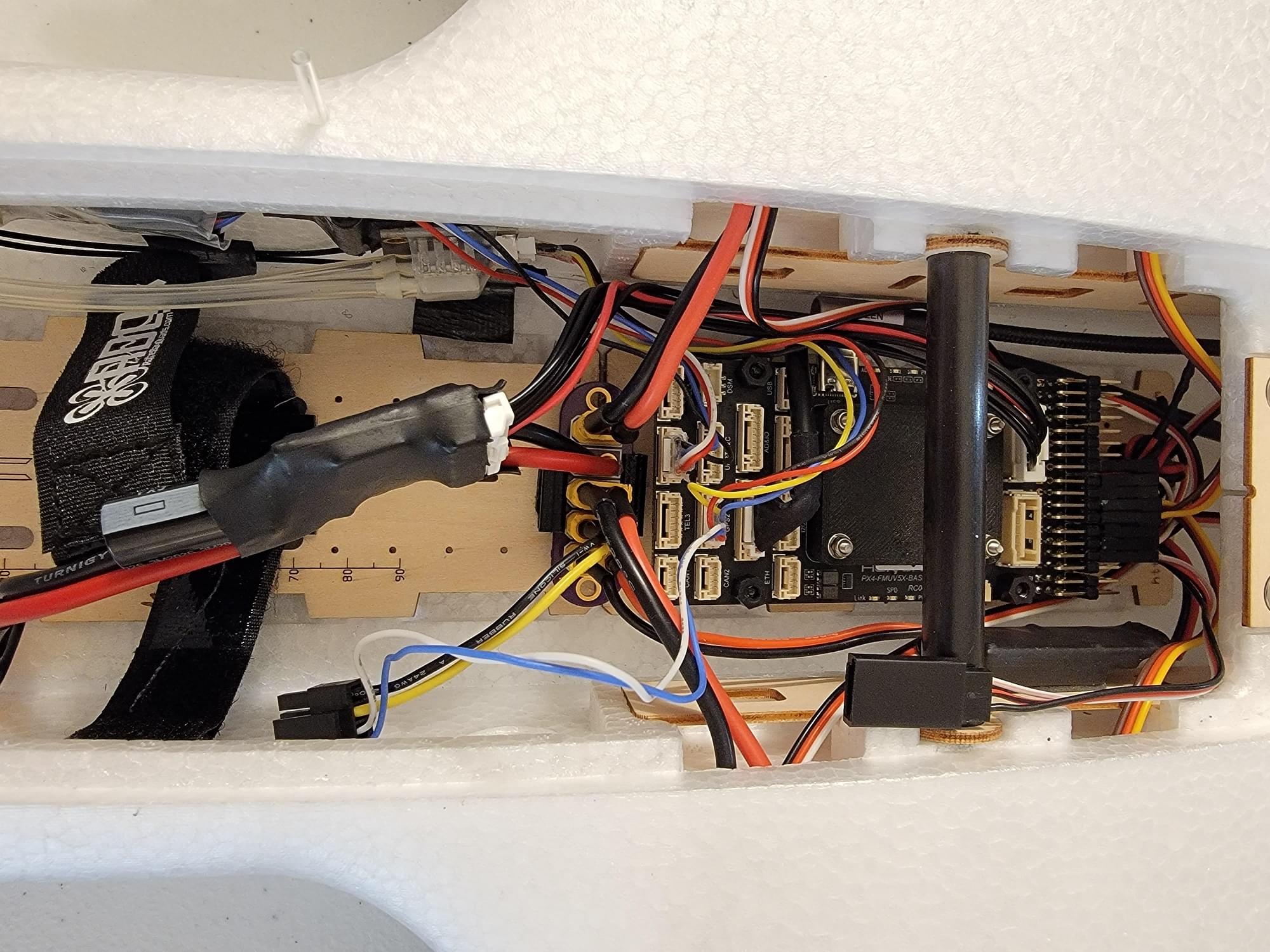
上图显示的是已完全安装完成并连接好的 Holybro 5X 载波。
电气
电池电源分配
电池电源通过 Holybro 电源模块,然后连接到定制设计的电源分配 PCB(印刷电路板)。从配电板上,电池电源通过独立的 XT30 连接器被分配到 BEC、两个 ESC 和 Caddx Vista。
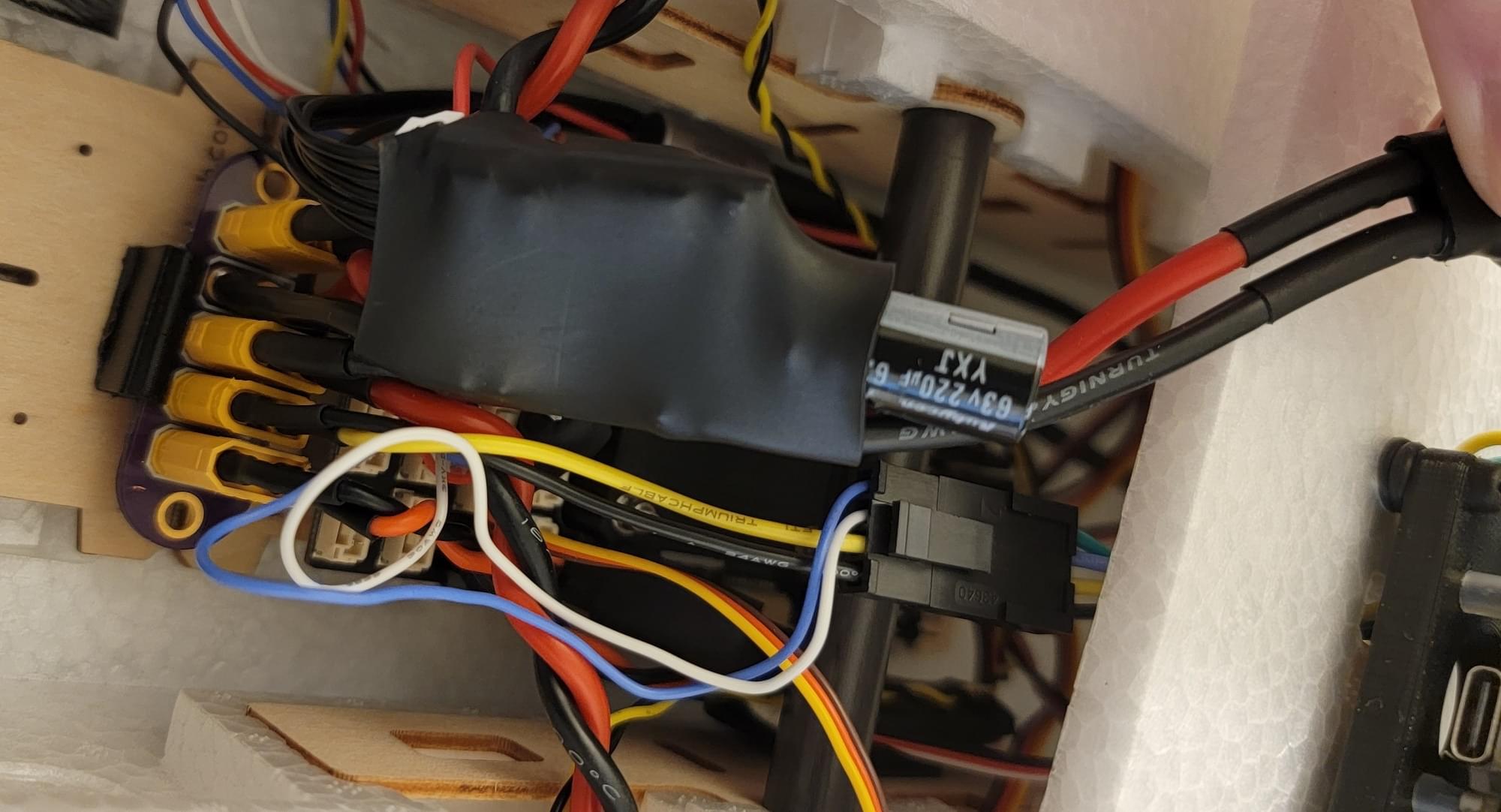
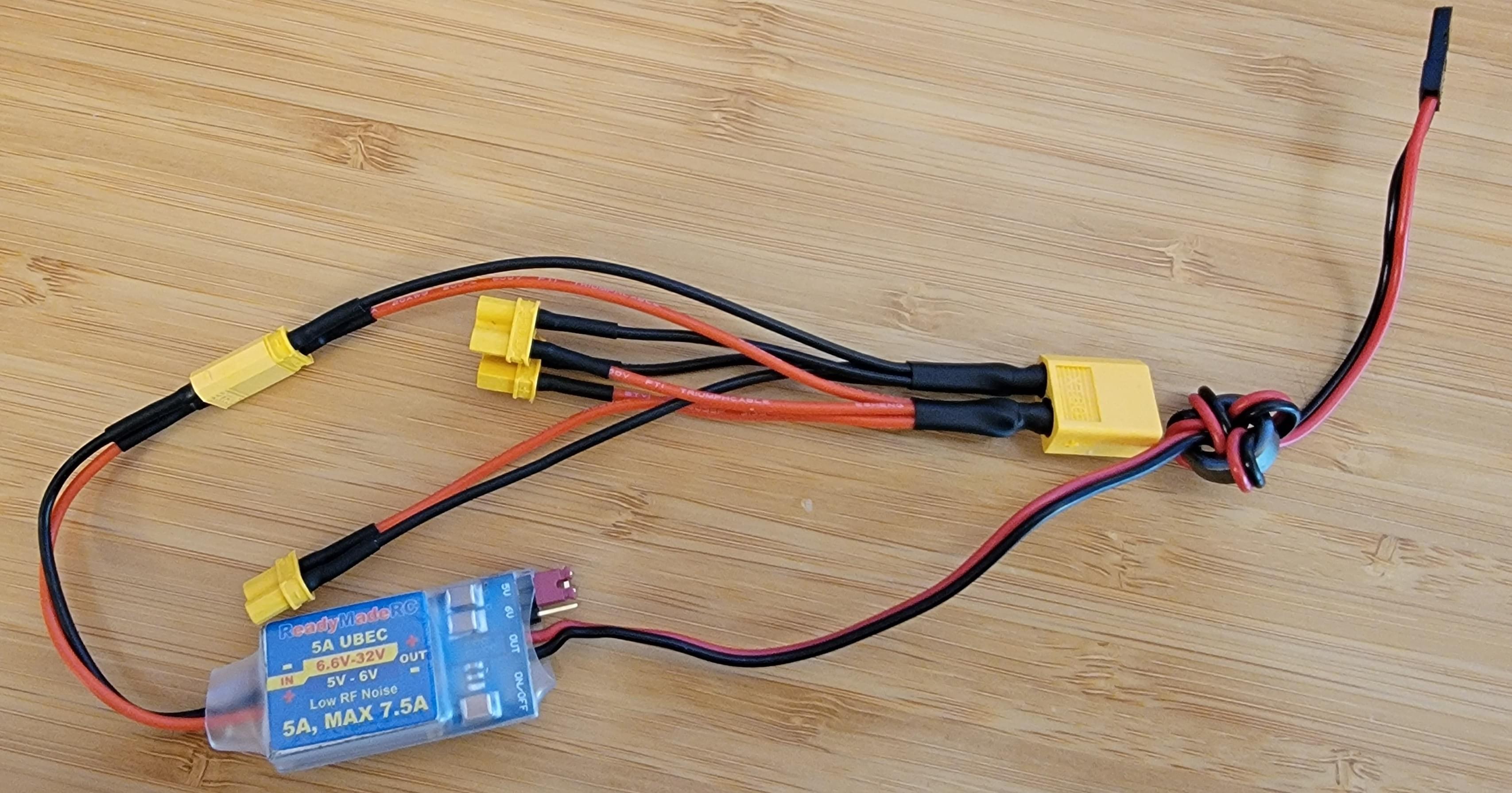
没有定制的印刷电路板,仍然可以轻松地为飞机上的所有组件分配电源。该图显示了一种替代解决方案,它由一个 XT60 连接器与多个 XT30 连接器连接而成。舵机电源 BEC 也显示在此图中。
伺服电源
由于霍利布鲁克运载工具不包括板载伺服电源,因此需要外接 "BEC"; 用于为舵机供电。BEC 的输入引线焊接到一个 XT30 连接器上,然后插入配电板。BEC 的输出可插入任何未使用的伺服输出(我选择了 IO 输出 8)。
电调和电机
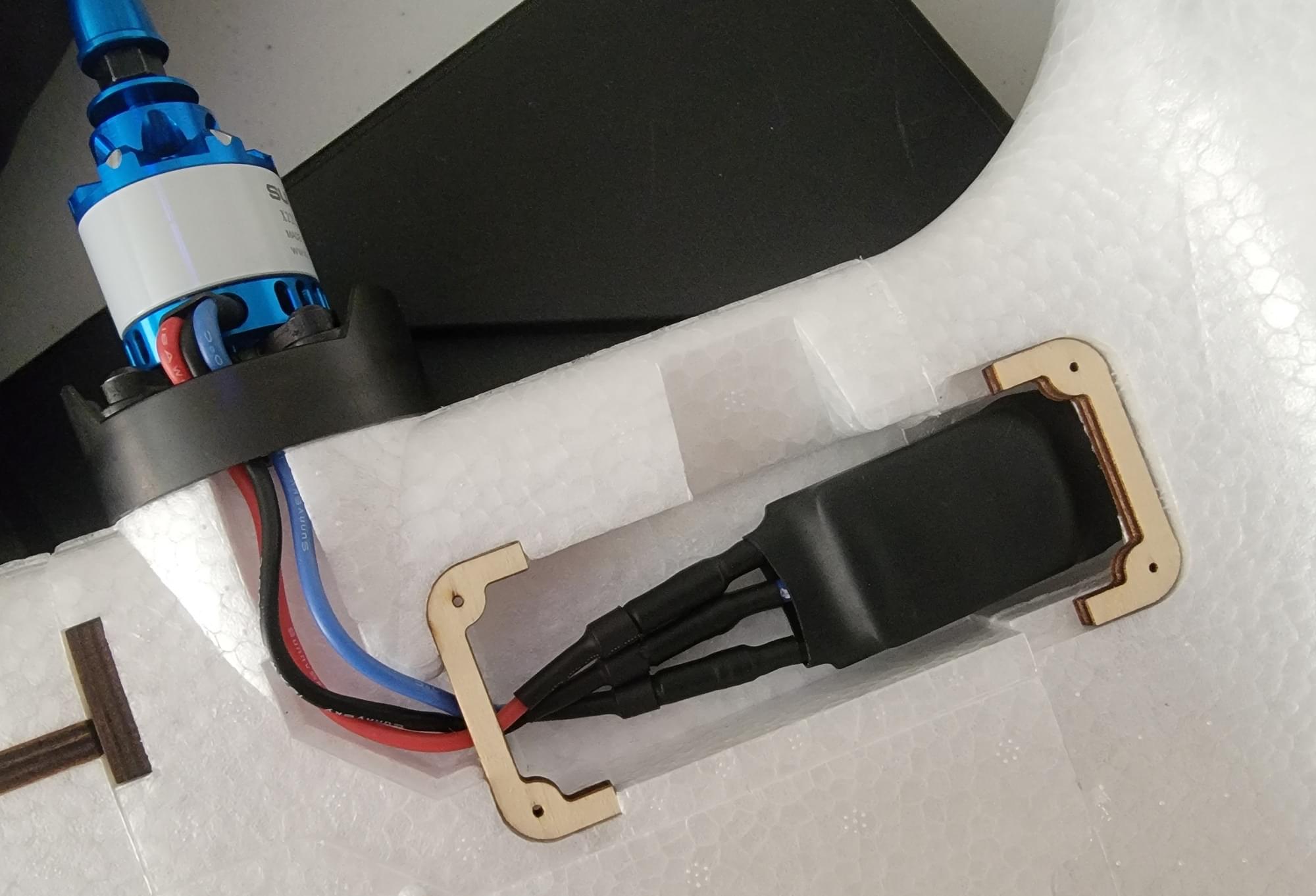
子弹头连接器焊接到 16AWG 导线上,然后焊接到每个电调的每个相位输出上。在完成的电调上收缩热缩管,然后将电调上的子弹头连接器连接到各自的电机上。
电机方向取决于连接到电调的电机引线的顺序。现在,请猜测每一边的方向。如果任一电机旋转方向错误,可通过调换任意两个连接来调换方向。正确的电机方向将在最后的飞行前检查中进行检查。
舵机和电调信号线
舵机按照左副翼、右副翼、左电调、右电调、升降舵、方向舵、FPV 平移的顺序连接到 FMU 输出端口。
信息
DSHOT ESC 而不是伺服系统的 PWM)。为了有效利用 DSHOT 输出端口限制因此,必须将两个电调连接到 FMU 输出通道 3 和 4。
空速传感器和皮托管
使用随附的 JST GH I2C 电缆将空速传感器连接到 FMU 载板上的 I2C 端口。
然后将皮托管推入皮托管支架,再安装到前方的 fpv 摄像机切口处。
将皮托管/静态软管剪成一定长度并安装好,以连接皮托管静态探头和空速传感器。最后,使用双面胶带将静态传感器粘贴在机身侧壁上。
ELRS RX
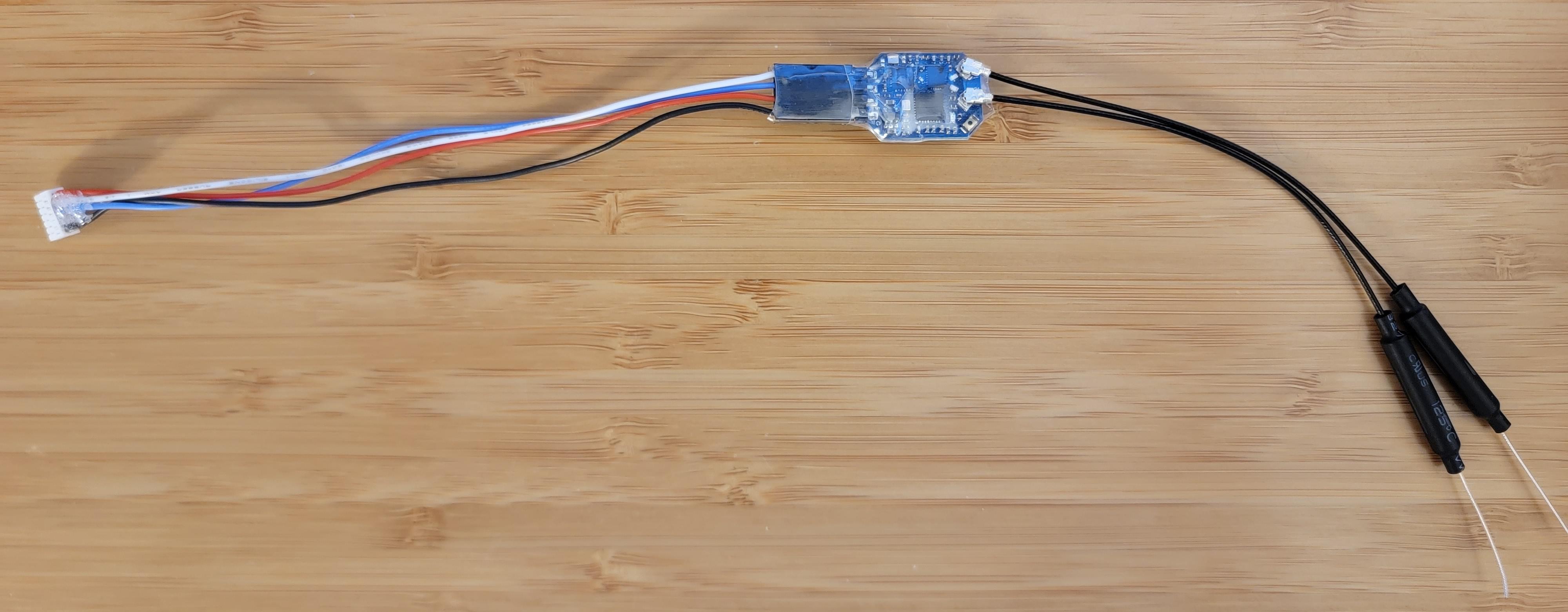
为连接 ELRS RX 和 JST GH 特制了一条电缆。 TELEM2 FMU 载板的端口。

电缆的另一端连接到一个杜邦连接器,以连接 ELRS RX 上的标准间隔针座。ELRS RX 与电缆相连,然后用热缩管将两者固定在一起。
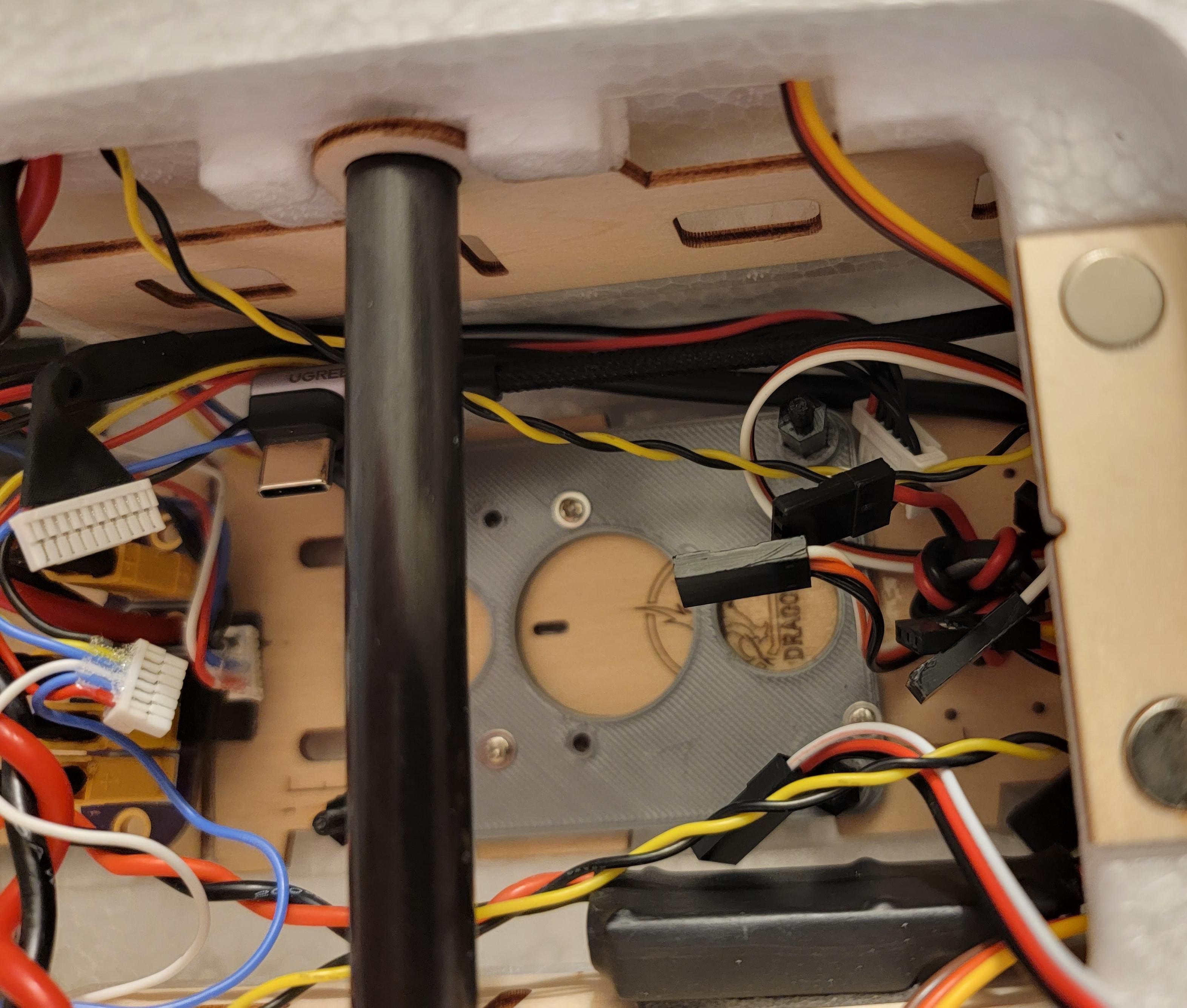
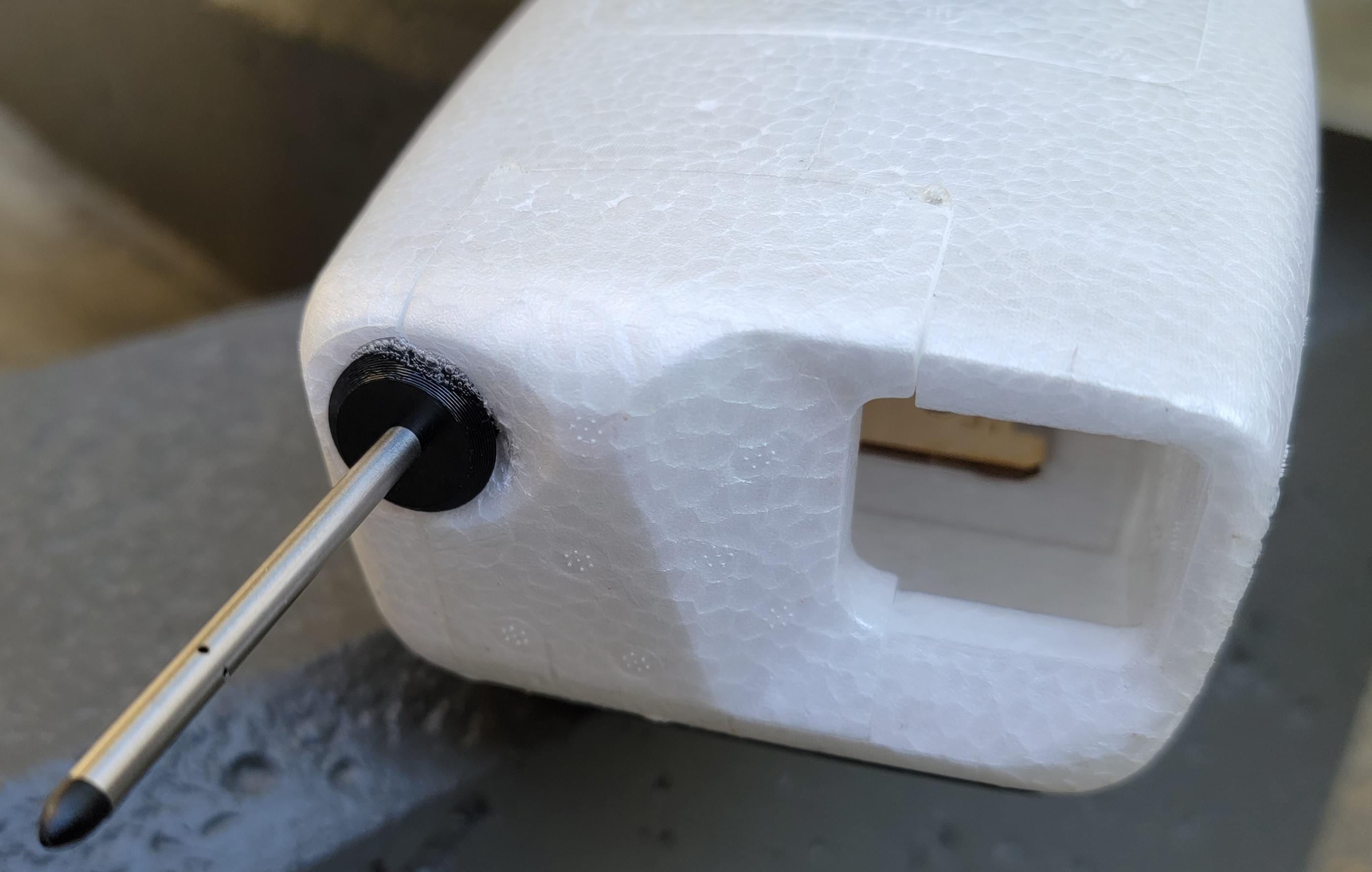
一根细长的无线电天线管穿过机身顶部,用于直立安装 ELRS 两根分集天线中的一根。第二根分集天线用胶带粘在机身侧壁上,与第一根天线成 90 度。使用双面胶带将 ELRS RX 固定在机身侧壁的空速压力传感器旁边。
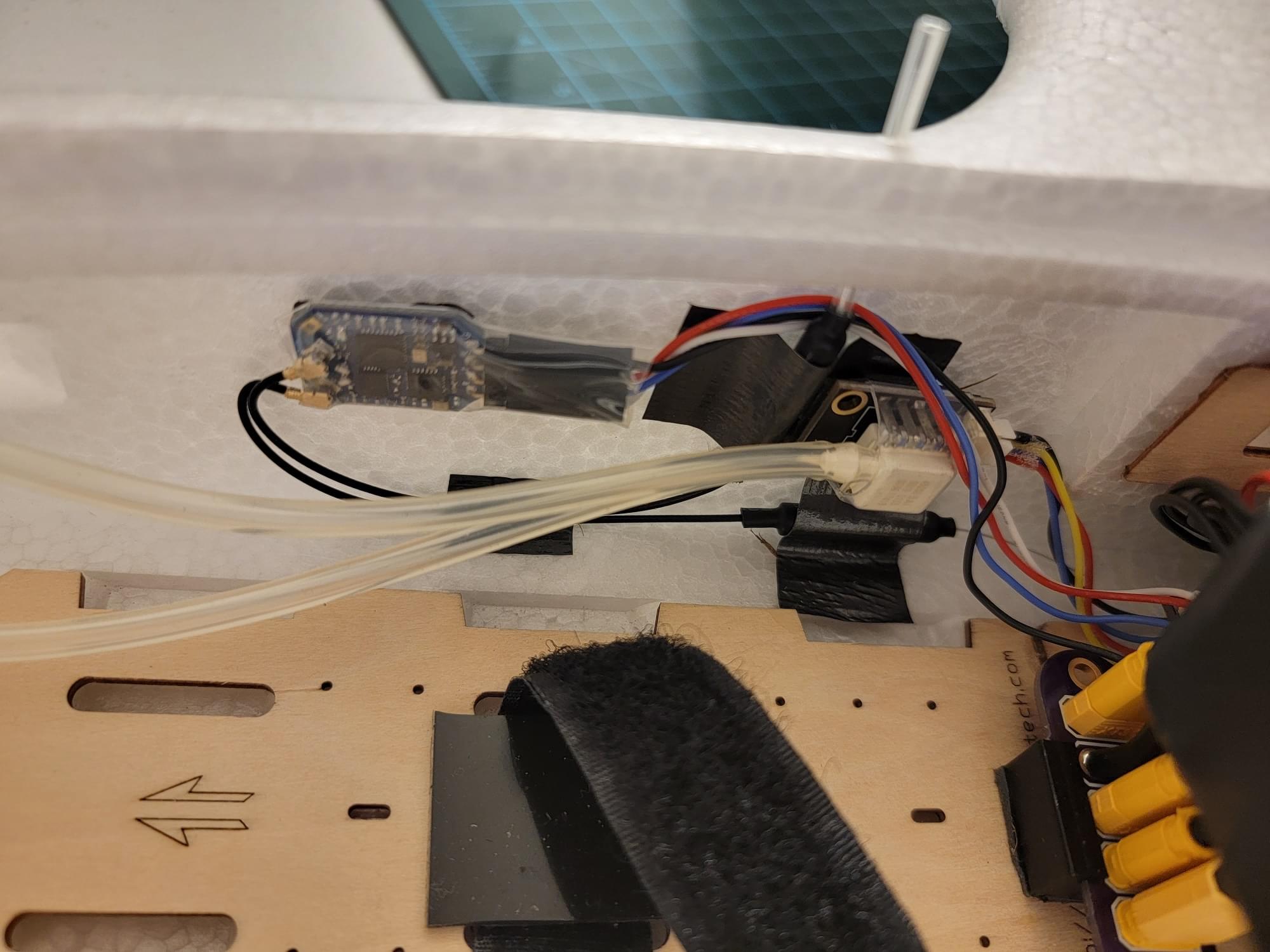
USB
使用直角 USB C 延长线可以方便地连接到调频装置上的 USB C 端口。
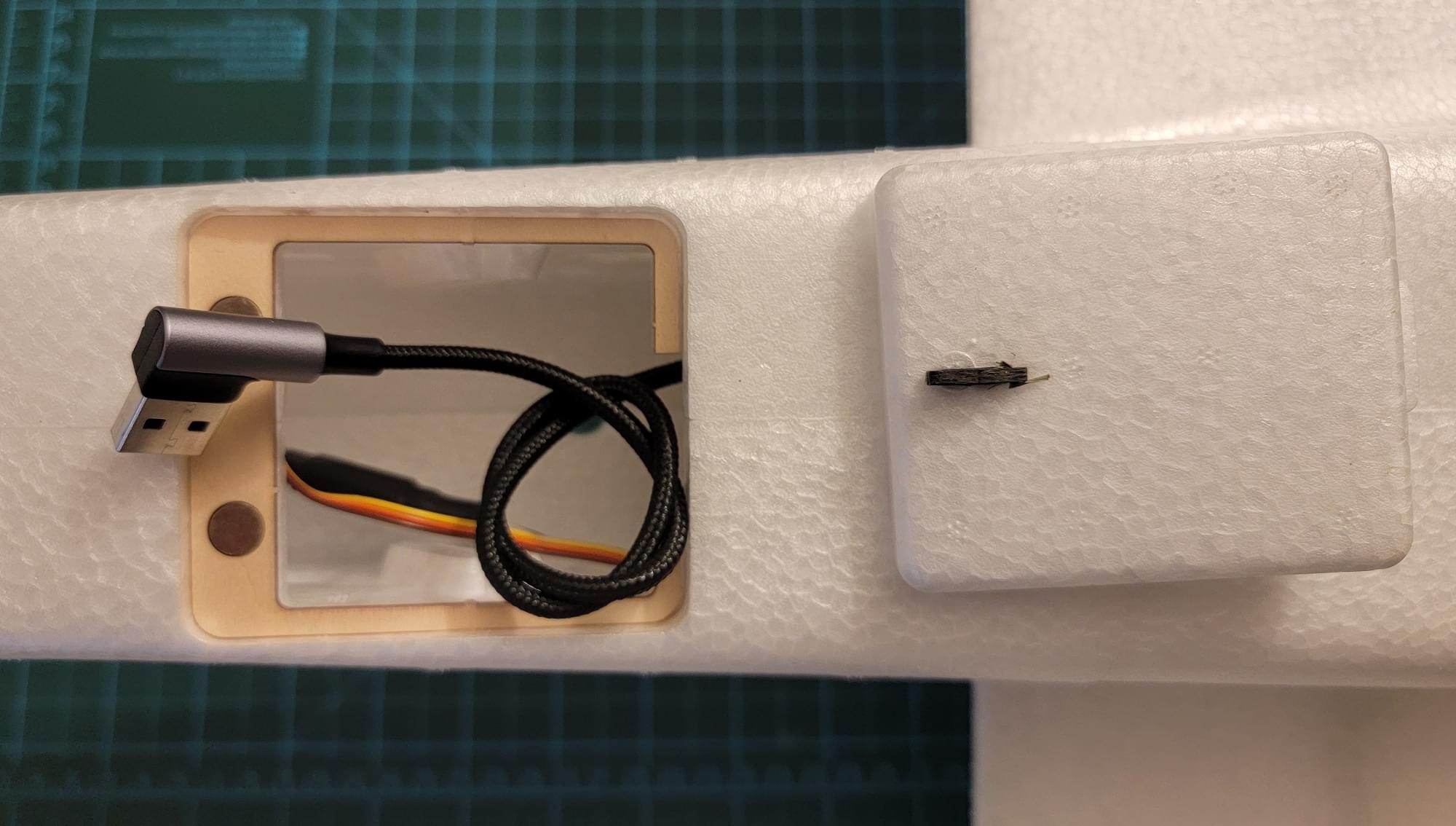
安装缆线时,缆线从像素鹰向飞机尾部延伸。缆线一直延伸到后舱门,在那里可以将多余的长度牢牢地绕成一个结。只需卸下后舱门并解开缆绳,就可以接触到这根缆绳。
固件构建
您不能为这辆车使用预制的 PX4 发布(或主)固件,因为它取决于 PX4 模块 crsf_rc 和 msp_osd 默认情况下不包括的
这些都需要一些自定义配置才能启用。
首先,遵循 本指南用于设置开发环境 和 本指南获取 PX4 源代码.
设置好构建环境后,打开终端并 CD 进入 PX4-自动驾驶仪 目录。要启动 PX4 板配置工具 (菜单) 运行:
make ark_fmu-v6x_default boardconfigcrsf_rc 模块
PX4 包含一个独立的 CRSF 分析器模块,支持遥测和 CRSF LinkStatistics。要使用该模块,默认 rc_input 模块必须禁用,并且 crsf_rc 模块必须启用。
- 在 PX4 电路板配置工具中,导航至
司机子菜单,然后向下滚动以突出显示rc_input. - 使用回车键删除
*从rc_input复选框。 - 滚动以突出显示
RC子菜单,然后按回车键打开。 - 滚动以突出显示
crsf_rc并按回车键启用。 - 保存并退出 PX4 板配置工具。
更多信息,请参见 TBS 穿越火线(CRSF)遥测技术.
msp_osd 模块
msp_osd 模块将 MSP 遥测数据传送到选定的串行端口。Caddx Vista Air 设备支持监听 MSP 遥测,并将在其 OSD(屏幕显示)中显示接收到的遥测值。
- 在 PX4 电路板配置工具中,导航至
司机子菜单,然后向下滚动以突出显示OSD. - 使用回车键打开
OSD子菜单 - 向下滚动以突出显示
msp_osd并按回车键启用
建筑物 & 闪光灯
一旦 msp_osd 和 crsf_rc 模块已启用,并且 rc_input 如果禁用模块,则必须编译固件源,并将生成的映像闪存到 FMU。
要编译和闪存固件,请通过 USB 将 FMU/Carrier 与构建主机连接并运行:
使 ark_fmu-v6x_default 上传PX4 配置
参数配置
该参数文件包含此构建的自定义 PX4 参数配置,包括无线电设置、调整参数和传感器配置。通过 QGC 加载该文件,使用以下说明 参数> 工具 (QGC 用户指南)。
您可能需要为您的构建修改一些参数:
- MSP_OSD_CONFIG 参数必须与连接到 Caddx Vista 的串行端口相匹配(在此版本中,串行端口必须与 Caddx Vista 的串行端口相匹配)、
/dev/ttyS7). - rc_crsf_prt_cfg 参数必须与连接到 ELRS RX 的串行端口相匹配(在此构建中、
Telem 1).
无线电设置
您应该在控制器上启用手动、Acro 和定位模式(至少在第一次飞行时)。有关说明,请参阅 飞行模式配置
我们还建议配置 自动调整开关 因为这样可以在飞行时更方便地启用/禁用自动调整功能。
该版本的通道映射包含在提供的 参数文件.通道顺序为油门、翻滚、俯仰、偏航、(空白)和飞行模式。
信息
ExpressLRS 要求 AUX1 作为上膛通道。该上膛通道独立于 PX4'上膛机制,用于通知 ELRS TX 可以切换到高发射功率。
在 PX4 频道映射中,我直接跳过了这个频道。在我的发射机上,该通道被设置为始终保持高电平,因此 ELRS 始终处于上膛状态。
电机安装 & 螺旋桨安装
电机和飞行控制面的设置在 致动器 节。提供的 参数文件 按照本构建中的描述映射致动器。
RD2 套件配有顺时针和逆时针螺旋桨,可用于反向旋转的发动机。使用逆时针螺旋桨时,飞机可以设置成没有 关键电机.
由于没有关键的发动机,即使发动机出现故障,也能最大限度地提高可控性。电机方向的设置应使螺旋桨朝向飞机顶部的机身。换句话说,如果飞机朝向左边的电机,它应该顺时针旋转,而右边的电机应该逆时针旋转。
取下螺旋桨后,为飞机提供动力并使用 致动器 在 QGC 中进行测试,以启动电机。如果左侧或右侧电机的旋转方向不正确,请交换两根电调引线,然后再次检查。最后,当两个电机的旋转方向都正确时,使用扳手安装螺旋桨。
最后检查
在首次飞行之前,必须进行全面的飞行前准备。
我建议检查以下项目:
- 传感器校准(QGC)
- 磁体校准
- 加速度计校准
- 空速校准
- 水平线校准
- 检查控制面偏转
- 右摇杆 -> 右副翼上升,左副翼下降
- 左摇杆 -> 左副翼上升,右副翼下降
- 向后摇杆 ->;升降器上升 -向前摇杆 ->;升降器下降
- 左舵 -> 舵向左
- 右舵 ->舵向右
- 检查 Px4 输入(在
稳定模式) - 向右翻滚 -> 右副翼下降
- 向左翻滚 -> 左副翼下降
- 俯仰 -> 电梯下降
- 俯仰下降 ->电梯上升
首次飞行
我建议首次起飞使用手动模式。由于这架飞机没有起落架,因此您需要自己抛掷飞机,或者最好请人帮忙抛掷。在抛掷任何飞机时,都要以机头略微向上的姿态全油门抛掷。
关键是要随时准备好向后输入操纵杆,以防止飞机碰巧向下调整时撞击地面。飞机成功升空后,巡航至几百英尺的高度,然后切换到 Acro 模式.这是使用 自动调整 来调整机身。
如果飞机在 Acro 模式切换到 位置模式.
打造成果和性能
总的来说,这次建造是成功的。在这种配置下,RD2 飞行性能良好,机载传感器和其他硬件也有足够的空间。
性能
- 失速速度:指示时速 15mph
- 巡航速度: 35-50mph
- 耐力~40 分钟,时速 28mph
视频及飞行日志
飞行记录的 FPV 视频: