返回模式(通用载具)
")
返回 飞行模式用于 安全飞行 在畅通无阻的道路上飞往安全目的地,并在那里着陆。
如果您使用这些类型的载具,应首先阅读以下主题:
信息
- 模式是自动的,无需用户干预 所需 来控制载具。
- 模式需要一个全局 3D 位置估计值(来自 GPS 或从 本地位置).
- 飞行器在没有全球定位的情况下无法切换到这种模式。
- 飞行器一旦失去位置估计,就会发生故障。
- 模式要求设置原点。
- 该模式可防止上膛(切换到该模式时载具必须已上膛)。
- 遥控开关可用于改变任何飞行器的飞行模式。
- 在多旋翼飞行器(或多旋翼飞行器模式下的 VTOL)中移动遥控杆将 默认情况下 改为 位置模式 除非正在处理重要的电池故障保护装置。
- VTOL 将根据触发返回模式时的模式,以 多旋翼 或 FW 模式返回。在 多旋翼 模式下,它将尊重多旋翼参数,例如着陆锥。在 FW 模式下,它将尊重固定翼参数(忽略锥体),但除非使用任务着陆,否则将过渡到 多旋翼 模式,并在下降高度徘徊后在目的地着陆。
概述
PX4 提供了几种选择安全返回路径、目的地和着陆的机制,包括使用任务中定义的原点、集结点(安全点)、任务路径和着陆顺序。
所有载具 名义上 支持所有这些机制,但并非所有机制对特定载具都有意义。例如,多旋翼飞行器几乎可以在任何地方着陆,因此除非在极少数情况下,否则使用着陆序列毫无意义。同样,固定翼飞行器需要飞行一条安全的着陆路径:它可以使用原点作为返回点,但默认情况下不会尝试在原点着陆。
本主题涵盖所有可能的返回类型,任何载具 也许 载具特定返回模式主题涵盖了每种载具的默认/推荐返回类型和配置。
以下各节将介绍如何配置 返回类型, 最低返航高度 和 着陆/抵达行为.
返回类型 (RTL_TYPE)
PX4 为寻找通往安全目的地和/或着陆的畅通无阻的路径提供了四种备选方法,这些方法通过以下方式设置 RTL_TYPE 参数。
从高层次上讲,它们是
- 原点/赛点返回 (
RTL_TYPE=0):上升到安全高度,然后通过直接路径返回最近的集结点或家园。 - 特派团着陆/返回集结点 (
RTL_TYPE=1):上升到安全高度,直飞最近的目的地 家庭以外:集结点或任务着陆点的起点。如果未定义任务降落点或集结点,则通过直接路径返航。 - 任务路径返回 (
RTL_TYPE=2):使用任务路径并快速继续任务着陆(如果已定义)。如果没有任务 着陆 确定的、快速返回家园的任务。如果没有 使命 定义,直接返回原点(忽略集结点)。 - 最近的安全目的地返回 (
RTL_TYPE=3):上升至安全高度,通过直接路径返回最近的目的地:原居地、任务着陆模式的起点或集合点。如果目的地是任务着陆模式,则按照模式着陆。
下文将对每种类型进行更详细的解释。
原点/集结点返回类型 (RTL_TYPE=0)
的默认返回类型。 多旋翼机 (更多信息请参见主题)。
在此返回键中键入载具:
- 上升到安全地带 最低返航高度 (高于任何预期障碍)。
- 直接飞往原点或集结点(以最近者为准)
- 关于 新来的人 下降到下降高度并等待可配置的时间。这段时间可用于展开起落架。
- 着陆或等待(这取决于着陆参数),默认情况下,多旋翼 模式下的 多旋翼 或 VTOL 将着陆,固定翼飞行器将在下降高度盘旋。FW 模式下的 VTOL 会将航向对准目的地点,切换到 多旋翼 模式,然后着陆。
信息
如果没有定义集结点,则与 返回发射 (RTL)/返回首页 (RTH)。
任务着陆/集结点返回类型 (RTL_TYPE=1)
的默认返回类型。 固定翼飞机 或 VTOL 载具(更多信息,请参阅主题)。
在此返回键中键入载具:
- 上升到安全地带 最低返航高度 (如果需要,飞行器还将保持其初始高度(高于任何预期障碍物)。如果飞行器的初始高度高于最小返回高度,则保持初始高度。
- 通过直接的恒定高度路径飞往集结点或航线起点。 任务着陆模式 (以最近者为准)。如果没有确定任务降落点或集结点,飞行器将通过直接路径返航。
- 如果目的地是任务着陆模式,它将按照模式着陆。
- 如果目的地是集结点或家庭,它将 落脚 下降高度(取决于着陆参数)。默认情况下,处于 多旋翼 模式的 多旋翼 或 VTOL 将着陆,而固定翼飞行器则在下降高度盘旋。FW 模式下的 VTOL 会将航向对准目的地点,转换为 多旋翼 模式,然后着陆。
信息
固定翼飞行器通常还设置 mis_tkoo_land_req 至 要求 任务着陆模式。
任务路径返回类型 (RTL_TYPE=2)
这种返回类型使用任务(如果已定义)来提供安全返回 路和 任务着陆模式 (如果已定义)提供着陆行为。如果有任务但没有任务着陆模式,则飞行该任务 反过来.集结点(如有)将被忽略。
信息
这种行为相当复杂,因为它取决于飞行模式,以及是否定义了任务和任务着陆。
使命 与 着陆模式:
- 任务模式 以 "快进 "模式继续执行任务(跳跃、延迟和任何其他非位置指令被忽略,悬停和其他位置航点被转换为简单航点),然后着陆。
- 任务模式以外的自动模式:
- 上升到安全地带 最低返航高度 超过任何预期的障碍。
- 直接飞到最近的航点(对于 FW 而言,不是着陆 WP),然后下降到航点高度。
- 从该航点以快进模式继续执行任务。
- 手动模式
- 上升到安全地带 最低返航高度 超过任何预期的障碍。
- 直接飞到着陆顺序位置,并下降到航点高度
- 使用任务着陆模式着陆
使命 不带 着陆模式已确定:
- 任务模式
- 任务模式以外的自动模式:
- 直接飞到最近的航点(对于 FW 而言,不是着陆 WP),然后下降到航点高度。
- 继续反向执行任务,就像在任务模式中触发返回模式一样(如上所述)
- 手动模式 直接飞往家庭所在地并着陆。
如果未定义任务,PX4 将直接飞往原点并着陆(忽略集结点)。
如果任务在返回模式中发生变化,则会根据新任务重新评估行为,并遵循上述相同规则(例如,如果新任务没有着陆顺序,而您正在执行任务,则任务会被逆转)。
最近的安全目的地返回类型 (RTL_TYPE=3)
在此返回键中键入载具:
- 上升到安全地带 最低返航高度 (高于任何预期障碍)。
- 直接飞往最近的目的地:母港、任务着陆模式或集结点。
- 如果目的地是 任务着陆模式 载具将按照该模式着陆。
- 如果目的地是原点或集结点,载具将下降到下降高度 (rtl_descend_alt),然后 降落或等待.默认情况下,处于 多旋翼 模式的 多旋翼 或 VTOL 将着陆,而固定翼飞行器则在下降高度盘旋。FW 模式下的 VTOL 会将航向对准目的地点,然后切换到 多旋翼 模式并着陆。
最低返航高度
对于大多数 返回类型 载具将上升到 最低安全高度 在返回之前(除非已经超过该高度),以避开与目的地之间的任何障碍物。
信息
例外情况是在执行 任务路径返回 从 在任务范围内.在这种情况下,飞行器会沿着任务航点前进,我们假定这些航点是为避开任何障碍物而规划的。
固定翼飞行器或 VTOL 在固定翼模式下的返航高度可通过参数 RTL_RETURN_ALT (不使用下一段描述的代码)。
在 多旋翼 模式下,多旋翼飞行器或 VTOL 飞行器的返航高度可通过以下参数配置 RTL_RETURN_ALT 和 RTL_CONE_ANG,定义了以目的地(原点或安全点)为中心的半圆锥体。
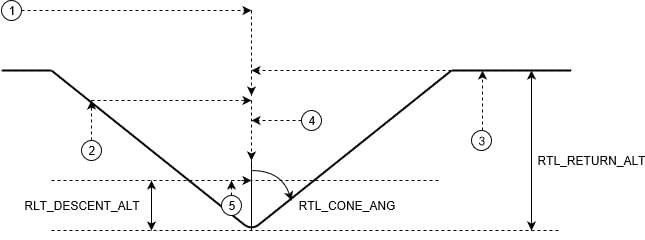
如果载具是
- 以上 RTL_RETURN_ALT (1) 它将在当前高度返回。
- 在锥体下方,它将返回与锥体相交的位置 (2) 或 rtl_descend_alt (以较高者为准)。
- 在锥体 (3) 外,它会先爬升,直到到达 RTL_RETURN_ALT.
- 锥体内部
- 以上 rtl_descend_alt (4) 它将以当前高度返回。
- 下图 rtl_descend_alt (5) 它将首先升至
rtl_descend_alt.
请注意:
- 如果 RTL_CONE_ANG 为 0 度时,没有圆锥体:
- 载具在
RTL_RETURN_ALT(或以上)。
- 载具在
- 如果 RTL_CONE_ANG 为 90 度时,载具将以较大的
rtl_descend_alt和当前高度。 - 载具将始终至少上升 rtl_descend_alt 返回。
在目的地着陆
除非执行 任务着陆模式 作为返回模式的一部分,载具将到达目的地,并迅速下降至 rtl_descend_alt 高度,它将在那里停泊 RTL_LAND_DELAY 降落前。如果 rtl_land_delay=-1 它会无限期地悬停。
默认着陆配置取决于载具:
- 多旋翼飞行器可短暂盘旋,必要时展开起落架,然后着陆。
- 固定翼飞行器使用带有 任务着陆模式,因为这样可以实现自动着陆。如果不使用任务着陆,默认配置是无限期悬停,这样用户就可以接管并手动着陆。
- 多旋翼 模式下的 VTOL 飞行和着陆与多旋翼飞行器完全一样。
- FW 模式下的 VTOLS 飞向着陆点,过渡到 多旋翼 模式,然后在目的地着陆。
任务着陆模式
任务着陆模式是作为任务计划的一部分而确定的着陆模式。它包括 mav_cmd_doo_land_start一个或多个定位航点,以及一个 mav_cmd_nav_land (或 mav_cmd_nav_vtol_land VTOL飞行器)。
任务中定义的着陆模式是自动着陆飞机的最安全方法。 固定翼飞机 PX4 上的载具。因此,固定翼载具配置为使用 任务着陆/真点返回 默认情况下。
参数
RTL 参数列于 参数参考 > 返回模式 (并概述如下)。
| 参数 | 说明 |
|---|---|
| RTL_TYPE | 返回机制(路径和目的地)。0:通过直接路径返回集合点或原点(以最近者为准)。1:通过直接路径返回集结点或任务着陆模式起始点(以最近者为准)。如果既未定义任务降落点也未定义集合点,则通过直接路径返航。如果目的地是任务着陆模式,则按照模式着陆。2:如果定义了着陆模式,则使用任务路径快进到着陆,否则快退到原点。忽略集结点。如果未定义任务计划,则直接飞回原点。3:通过直接路径返回最近的目的地:原点、任务着陆模式的起点或安全点。如果目的地是任务着陆模式,则按照模式着陆。 |
| RTL_RETURN_ALT | 以米为单位返回高度(默认值:60 米),当 RTL_CONE_ANG 如果已经超过该值,载具将以当前高度返回。 |
| rtl_descend_alt | 最小返回高度和飞行器从较高返回高度减缓或停止初始下降的高度(默认值:30 米) |
| RTL_LAND_DELAY | 等待时间 rtl_descend_alt 着陆前(默认值:0.5 秒)--默认情况下,这段时间很短,因此飞行器只需减速然后立即着陆。如果设置为-1,系统将在 rtl_descend_alt 而不是着陆。提供延迟是为了让您配置起落架展开(自动触发)的时间。 |
| RTL_MIN_DIST | 从原点上升到锥体指定的返回高度时的最小水平距离。如果飞行器与原点的水平距离小于这个距离,则会以当前高度或 rtl_descend_alt (以较高者为准),而不是先升到 RTL_RETURN_ALT。 |
| RTL_CONE_ANG | 定义飞行器 RTL 返回高度的锥体的半角。值(单位:度):0, 25, 45, 65, 80, 90.请注意,0 表示没有锥度(始终在以下高度返回 RTL_RETURN_ALT 或更高),而 90 则表示载具必须在当前高度或 rtl_descend_alt (以较高者为准)。 |
| com_rc_override | 控制在多旋翼飞行器(或 多旋翼 模式下的 VTOL)上移动摇杆是否会导致模式切换为 位置模式 (载具正在处理关键电池故障保护时除外)。该功能可分别在自动模式和离车模式下启用,默认在自动模式下启用。 |
| com_rc_stick_ov | 杆的移动量会导致过渡到 位置模式 (如果 com_rc_override 已启用)。 |
| RTL_LOITER_RAD | [仅限固定翼飞机] 待机圆半径(以 RTL_LAND_DELAY). |
| mis_tkoo_land_req | 指定任务降落或起飞模式是 所需.一般情况下,固定翼飞行器需要设置着陆模式,但 VTOL 不需要。 |