CUAV V5 nano 自动驾驶仪
警告
PX4 不生产这种(或任何)自动驾驶仪。请联系 生产商 硬件支持或合规问题。
V5 nano® 是一种用于空间受限应用的自动驾驶仪,由 CUAV 设计® 与 PX4 团队合作。
自动驾驶仪体积小,可用于 220 毫米竞赛无人机,但功能强大,足以满足大多数无人机的使用要求。

它的一些主要功能包括
- 与 Pixhawk 项目 FMUv5 设计标准,并使用 Pixhawk 连接器标准 所有外部接口。
- 比 FMU v3 更先进的处理器、内存和闪存,以及更稳定可靠的传感器。
- 固件与 PX4 兼容。
- 宽敞的 2.6 毫米 I/O 引脚间距,使所有接口的使用更加方便。
信息
该飞行控制器 支持的制造商.
快速总结
主 FMU 处理器:STM32F765◦32 位 Arm® Cortex®-M7、216MHz、2MB 内存、512KB RAM
机载传感器
- Accel/Gyro: ICM-20689
- Accel/Gyro: ICM-20602
- Accel/Gyro: BMI055
- 磁力计IST8310
- 气压计MS5611
接口:8 个 PWM 输出
- FMU 上有 3 个专用 PWM/捕获输入端
- 用于 CPPM 的专用 R/C 输入
- 用于 Spektrum / DSM 和 S.Bus 的专用 R/C 输入
- 模拟/PWM RSSI 输入
- 4 个通用串行端口
- 3 个 I2C 端口
- 4 条 SPI 总线
- 2 条 CAN 总线
- 电池电压/电流模拟输入端
- 2 个额外的模拟输入端
- 支持 nARMED
电源系统:电源砖输入:4.75~5.5V
USB 电源输入:4.75~5.25V
重量和尺寸
- 尺寸:60*40*14 毫米60*40*14 毫米
其他特征
- 工作温度:-20 ~ 85°C (测量值)
购买地点
CUAV Aliexpress (国际用户)
CUAV 淘宝 (中国大陆用户)
信息
自动驾驶仪可与附带的 Neo GPS 模块一起购买
连接(接线)
引脚
下载 V5 nano 引脚 这里.
构建固件
TIP
大多数用户无需构建此固件!它已预置并由 QGroundControl 当连接了适当的硬件时。
至 建造 PX4 为这一目标:
make px4_fmu-v5_default调试端口
PX4 系统控制台 和 SWD 接口 在 FMU 调试 端口DSU7).电路板没有 I/O 调试接口。
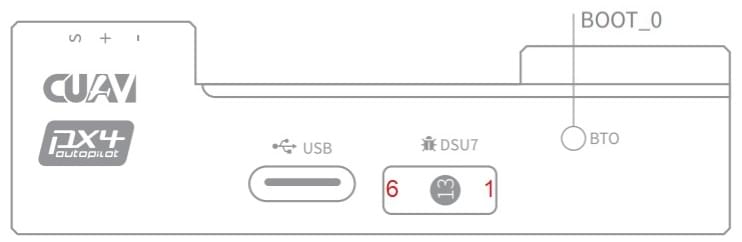
调试端口 (DSU7) 使用一个 JST BM06B 连接器,其引脚布局如下
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | 5V+ | +5V |
| 2(黑色) | DEBUG TX(输出) | +3.3V |
| 3(黑色) | DEBUG RX(输入) | +3.3V |
| 4(黑色) | FMU_SWDIO | +3.3V |
| 5(黑色) | FMU_SWCLK | +3.3V |
| 6(黑色) | 接地 | 接地 |
产品包装中包括一条方便的调试电缆,可以连接到 DSU7 端口。这将分出一条 FTDI 电缆,用于连接 PX4 系统控制台 USB 端口,以及用于 SWD/JTAG 调试的 SWD 引脚。提供的调试电缆不连接 SWD 端口 Vref 针 (1)。
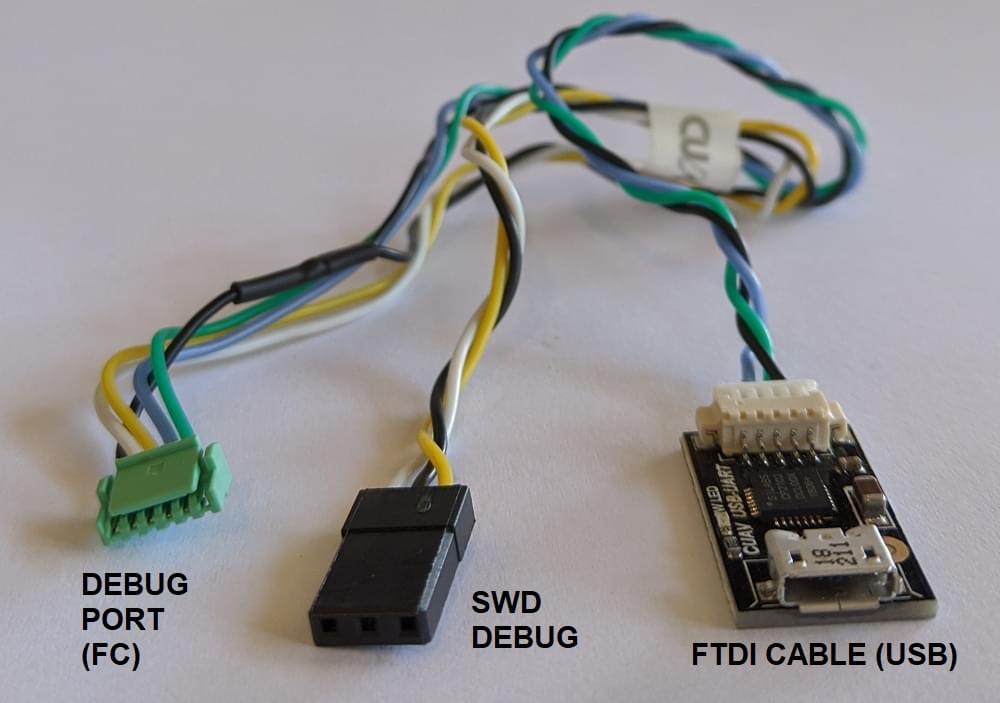
警告
SWD Vref 引脚 (1) 使用 5V 作为 Vref,但 CPU 运行电压为 3.3V!
某些 JTAG 适配器(世纪佳缘 J-Link)会使用 Vref 电压来设置 SWD 线路的电压。对于直接连接到 Segger Jlink 我们建议您使用标有 "3.3 伏 "的连接器 4 号针脚上的 3.3 伏电压。 DSM/SBUS/RSSI 提供 Vtref 的电压(即提供 3.3V 和 3.3V 电压)。 不是 5V).
更多信息,请参见 使用 JTAG 进行硬件调试.
串行端口映射
| UART | 设备 | 港口 |
|---|---|---|
| UART1 | /dev/ttyS0 | 全球定位系统 |
| USART2 | /dev/ttyS1 | TELEM1(流量控制) |
| USART3 | /dev/ttyS2 | TELEM2(流量控制) |
| UART4 | /dev/ttyS3 | TELEM4 |
| USART6 | /dev/ttyS4 | TX 是来自 SBUS_RC 连接器的 RC 输入 |
| UART7 | /dev/ttyS5 | 调试控制台 |
| UART8 | /dev/ttyS6 | 未连接(无 PX4IO) |
额定电压
V5 nano 必须从 电源 在飞行过程中,还可以/或者从 USB 用于台架测试。
信息
PM2 连接器不能用于为电源供电 V5 nano (见 本期).
信息
伺服电源轨既不由 FMU 供电,也不向 FMU 供电。但是,标有 + 都是共用的,BEC 可以连接到任何伺服引脚组,为伺服电源轨供电。
过电流保护
V5 nano 没有过流保护功能。
外围设备
支持的平台/机身
任何可使用普通遥控伺服器或 Futaba S-Bus 伺服器控制的多旋翼飞行器、飞机、漫游车或船只。支持的全套配置可参见 机身参考.
兼容性
CUAV 采用了一些差异化设计,与某些硬件不兼容,下文将对此进行说明。
Neo v2.0 GPS 与其他设备不兼容
Neo v2.0 GPS 建议与 CUAV V5+ 和 CUAV V5 nano 与其他 Pixhawk 飞行控制器不完全兼容(特别是蜂鸣器部分不兼容,安全开关也可能有问题)。
UAVCAN NEO V2 PRO 全球导航卫星系统接收器 也可以使用,并与其他飞行控制器兼容。
使用 JTAG 进行硬件调试
DSU7 FMU 调试引脚 1 的电压为 5 伏,而不是 CPU 的 3.3 伏。
某些 JTAG 探头在与目标机通信时使用该电压设置 IO 电平。
用于直接连接 Segger Jlink 我们建议将 DSM/SBUS/RSSI 第 4 针的 3.3 伏电压用作调试连接器上的第 1 针 (Vtref).
PM2 无法为飞行控制器供电
PM2 只能测量电池电压和电流,但 不 为飞行控制器供电。
警告
PX4 不支持该接口。
已知问题
以下问题涉及 批号 中首次出现。批号是 V01 后面的四位数生产日期,显示在飞行控制器侧面的贴纸上。例如,序列号 Batch V011904((V01 是 V5 的编号,1904 是生产日期,即批号)。
SBUS / DSM / RSSI 接口 引脚 1 未熔断
警告
这是一个安全问题。
请勿在 SBUS / DSM / RSSI 接口上连接其他设备(遥控接收器除外),否则会导致设备损坏!
- 找到了 批次 V01190904xxxx
- 已修复: 晚于 V01190904xxxx 的批次
更多信息
- V5 nano 手册 (CUAV)
- FMUv5 参考设计引脚布局 (CUAV)
- CUAV Github (CUAV)
- 在大疆 FlameWheel450 上使用 CUAV v5 nano 制作机身日志