任务
任务是一个预定义的飞行计划,可在 QGroundControl 中进行规划并上传到飞行控制器,然后在 QGroundControl 中自主执行。 任务模式.
任务通常包括控制起飞、飞行一系列航点、捕捉图像和/或视频、部署货物和着陆等项目。QGroundControl 允许您使用全手动方式规划任务,也可以使用其更高级的功能规划地面区域勘测、走廊勘测或结构勘测。
本专题概述了如何计划和执行飞行任务。
规划任务
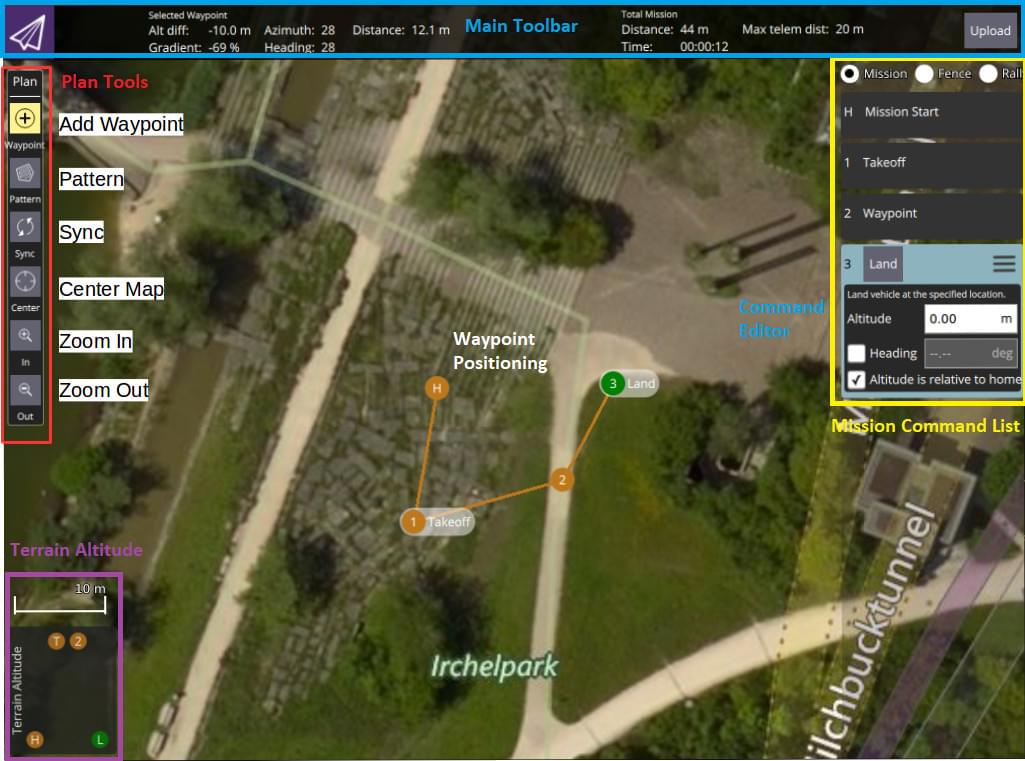
手动规划任务非常简单:
- 切换到任务视图
- 选择 添加航点 (加号)图标。
- 点击地图添加航点。
- 使用右侧的航点列表可修改航点参数/类型 底部的高度指示器可显示每个航点的相对高度。
- 完成后,点击 上传 按钮(右上角)将任务发送到载具。
您还可以使用 图案 自动创建调查网格的工具。
TIP
欲了解更多信息,请参阅 QGroundControl 用户指南.
任务可行性检查
PX4 会进行一些基本的合理性检查,以确定任务是否可行。例如,任务是否离飞行器足够近,任务是否会与地理围栏冲突,或者是否需要任务着陆模式但该模式不存在。
这些检查在任务上传时和运行前立即进行。如果任何一项检查失败,都会通知用户,并且无法启动任务。
有关检查和可能采取的行动的更多详情,请参阅: 任务模式 (FW) > 任务可行性检查 和 任务模式 (MC) > 任务可行性检查.
设置载具偏航
如果设置了该参数,多旋翼飞行器将偏航,朝向 标题 目标航点中指定的值(对应于 MAV_CMD_NAV_WAYPOINT.param4).
如果 标题 未明确设置目标航点 (param4=NaN则载具将偏航至参数 MPC_YAW_MODE.默认情况下,这是下一个航点。
无法独立控制偏航和行驶方向的载具类型将忽略偏航设置(如固定翼飞机)。
设置验收/转弯半径
接受半径 定义了一个航点周围的圆圈,在这个圆圈内,载具会认为自己已经到达该航点,并将立即切换到(并开始转向)下一个航点。
对于多旋翼无人机,接收半径可通过参数 NAV_ACC_RAD.默认情况下,半径较小,以确保多旋翼飞行器从航点上方通过,但也可以增大半径,以创建更平滑的路径,使无人机在到达航点之前就开始转弯。
下图显示了同一任务在不同接受半径参数下的飞行情况:

转弯时的速度根据接受半径(= 转弯半径)和允许的最大加速度和颠簸自动计算得出(参见 "转弯时的速度")。 多旋翼飞行器的振动抑制型轨迹).
TIP
有关航点周围接受半径影响的更多信息,请参阅: 任务模式 > 中途轨迹.
包裹运送(货物)任务
PX4 支持在任务中使用机械手运送货物。
这种任务的规划与其他任务大致相同。 航点任务在 "飞行任务 "中,有任务起点、起飞航点、各种路径航点以及可能的返回航点。唯一不同的是,包裹投递任务必须包含一个任务项,以说明包裹的投放方式和部署机制。更多信息请参阅 包裹投递任务.
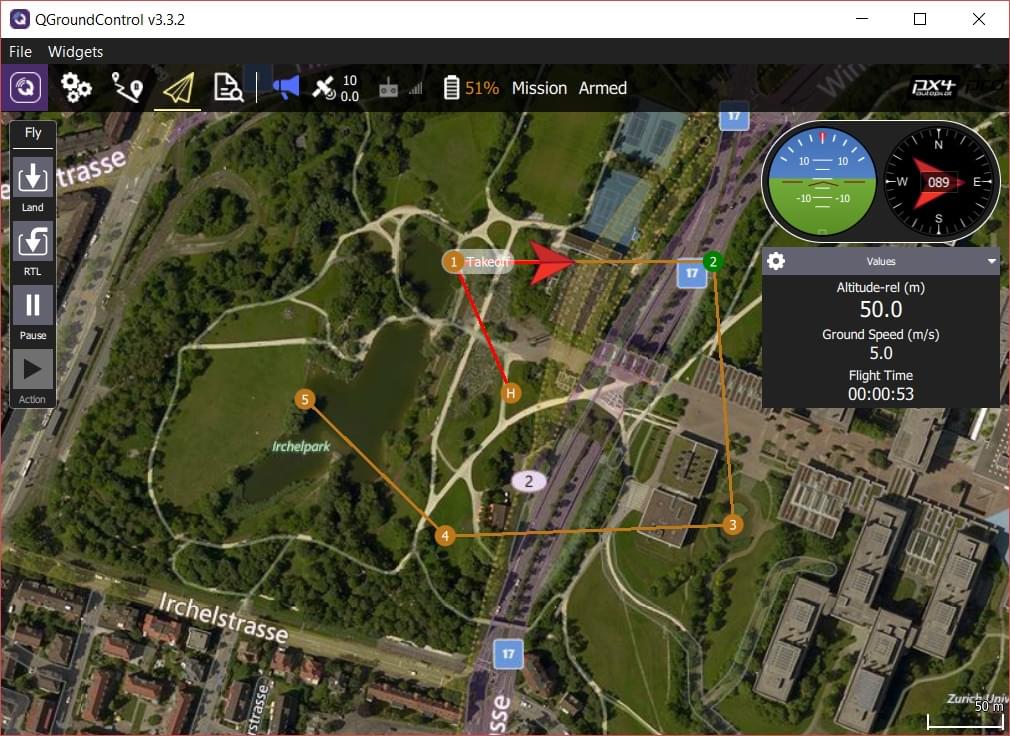
飞行任务
上传任务后,切换到飞行视图。任务的显示方式便于跟踪进度(在此视图中无法修改)。