Foxtech Loong 2160 VTOL
Foxtech Loong 2160 VTOL 是一款易于制作的几乎可立即飞行 (ARF) 的四翼 VTOL 无人机,翼展为 2160 毫米。本制作指南展示了如何使用以下工具添加飞行控制器系统 Auterion Skynode 评估套件 或 Pixhawk 6C 并设置 PX4。

概述
规格
- 翼展:2160 毫米
- 机身长度: 1200 毫米
- 起飞重量约 7 千克(不包括有效载荷)
- 最长飞行时间: 1 小时 30 分钟
- 巡航速度约 17 米/秒
- 最大有效载荷重量约 1.5 千克
- 手提箱尺寸:125 厘米 x 34 厘米 x 34 厘米
主要功能
- 轻松组装:安装快捷方便
- 便携性设计小巧,随附便携包,方便携带
- 随时可飞:所有推杆均已预先安装和接线,最大限度地缩短了安装时间
- 延长飞行时间:最长 1 小时 30 分钟,取决于天气条件和起飞重量
- 多种有效载荷能力:宽敞的机身可容纳多种有效载荷,包括用于测绘应用的索尼 A7R 等选件。
购买地点
飞行控制器
已对以下选项进行了测试:
附加配件
- Auterion 12S 电源模块
- Holybro PM08D 电源模块(Auterion PM 的替代品)
- GPS F9P(包含在 Skynode 评估套件中)
- GPS M9N(F9P 的廉价替代品)
- 空速传感器(包含在 Skynode 评估套件中) - 建议提高安全性和性能
- 空速传感器(更便宜的替代品)
- Lidar Lightware lw20-c(包含在 Skynode 评估套件中) 可选
- Lidar Seeed Studio PSK-CM8JL65-CC5(更便宜的替代品) 可选
- 无线电 (RC) 系统 您喜欢的
- 地面站和无线电链路
- USB-C 延长线
- I2C 分路器
- 三轴打印支架
- 1x 底板
- 1x 叠放式灯具
- 1x 风扇安装
- 1x 无线电支架
- 1x 顶板
- 1x 无线电天线适配器
- 1x USB-C 底座 1
- 1x USB-C 底座 2
- 打乱螺纹刀片
- XT30 连接器
- 分部螺丝
- 拉链扎带
- 天线延长线 - 与无线电系统匹配
- 推荐电池(12S 22Ah)
工具
本次构建使用了以下工具。
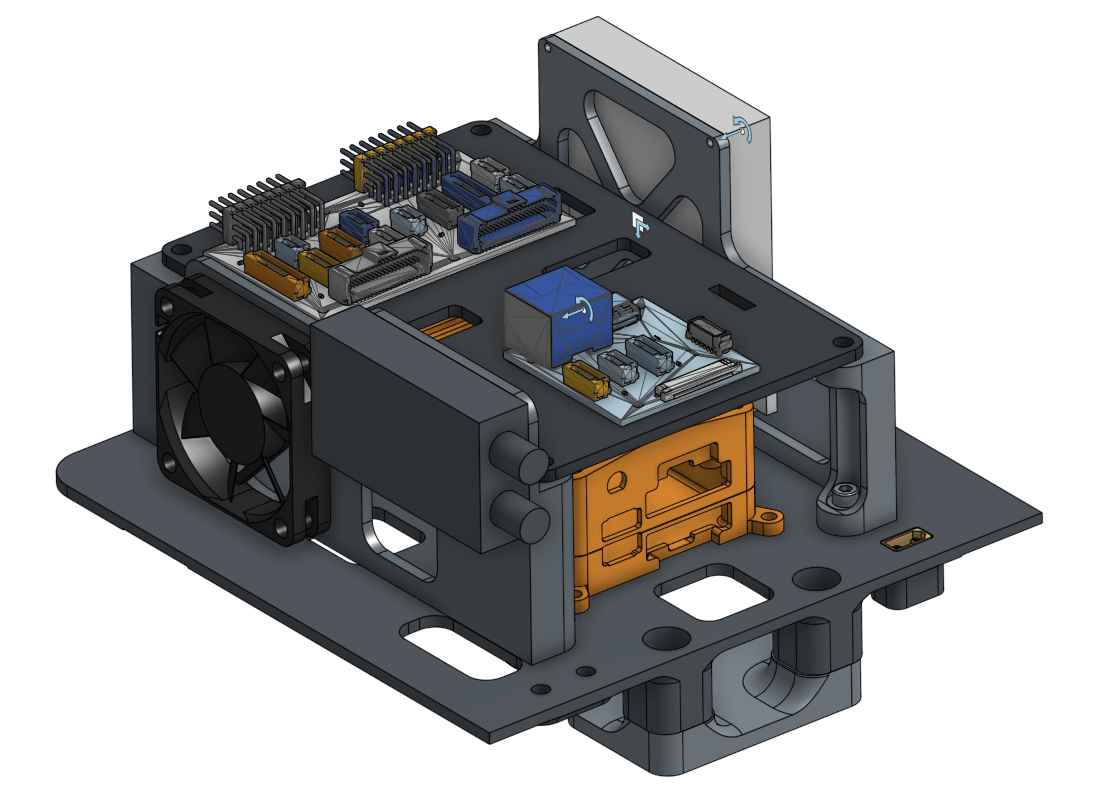
硬件集成
本文档将介绍 Auterion Skynode 的集成。安装 Pixhawk 的方法与此类似。
准备工作
航空电子设备
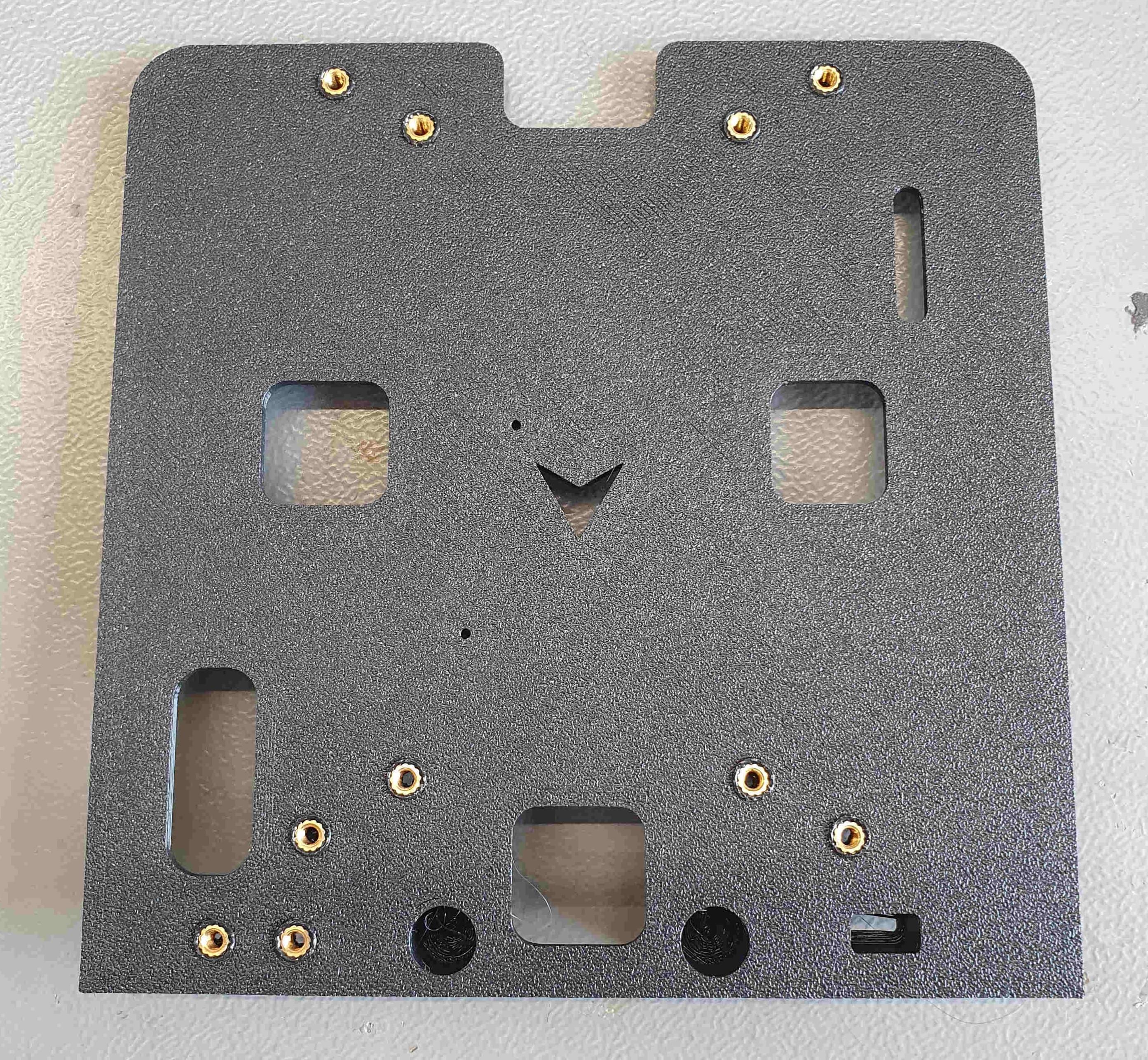
准备 3D 打印部件
信息
用烙铁将螺纹插件压入 3D 打印部件。
如图所示,将 10 个 M3 螺纹插件插入底板:
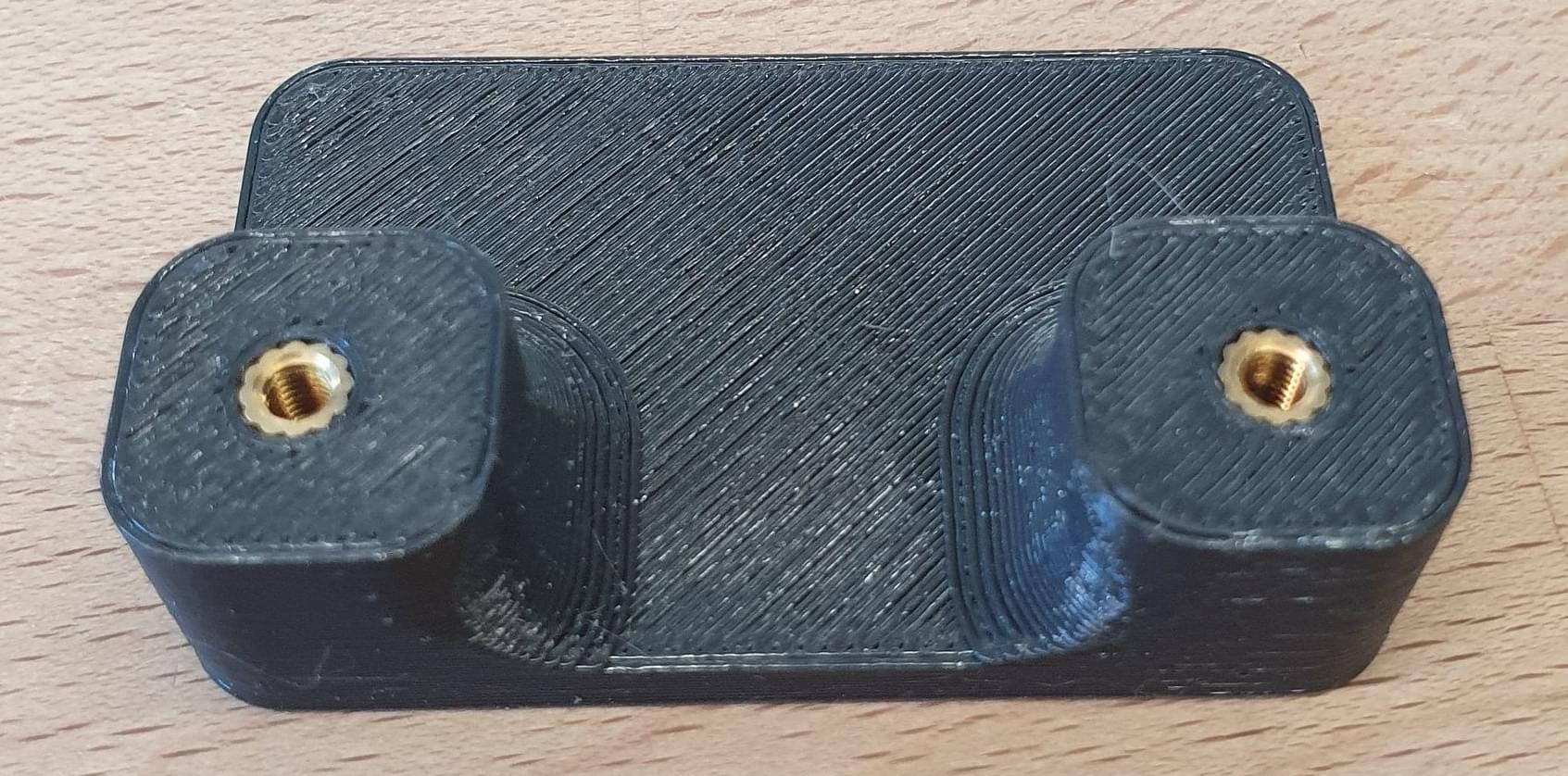
如下图所示,在堆叠夹具中插入 2 个 M3 螺纹插件:
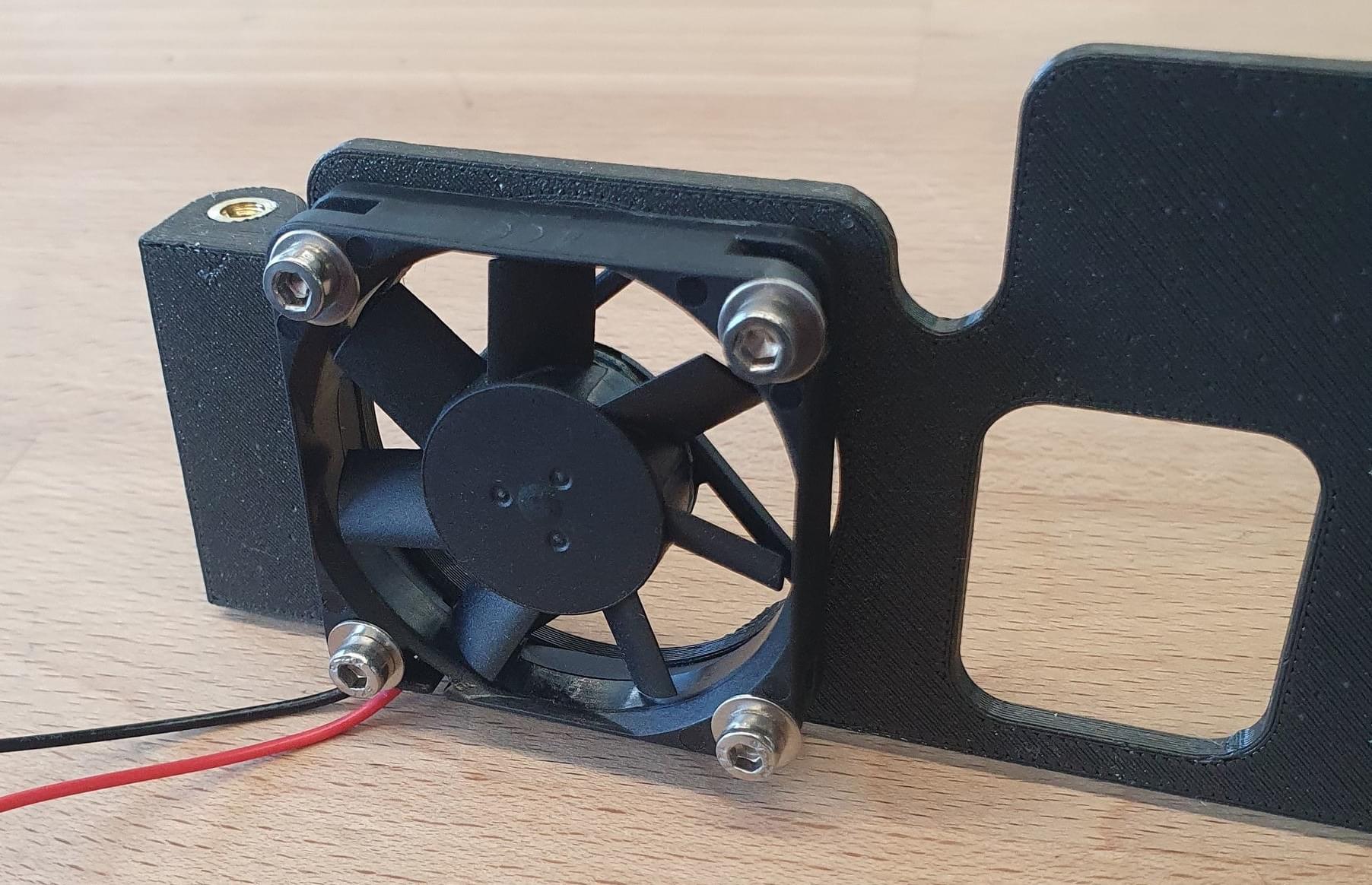
如下图所示,在风扇安装座和无线电安装座中插入 2 个 M4 螺纹插件。

如果您想在风扇支架上安装 40mm 5V 风扇,请插入 4 个 M3 插片。

将电缆连接器改为伺服连接器,以便将其插入要供电的伺服轨道。
信息
如果使用大功率收音机,可能需要风扇。
从载具上拆下原来的安装板。用胶带将电缆粘在机身外侧。

将底板滑入载具。
将堆叠夹具拧到底板上,并用胶带或笔标记堆叠夹具的位置。
从机身上取下部件,用热熔胶将堆叠夹具粘好。
40A 电源模块
使用 Skynode 时,40A 电源模块为航空电子设备供电(随 Skynode 评估套件提供):
卸下 40A PM 的外壳。
用 2x M2x6mm 螺丝将 PM 固定在底板底部。
创建一条电缆,将 XT60 连接器延伸至安装在底板上的 XT30。这样,6S 电池电源就可以通过载具自带的预配置电缆直接插入 XT30 连接器。
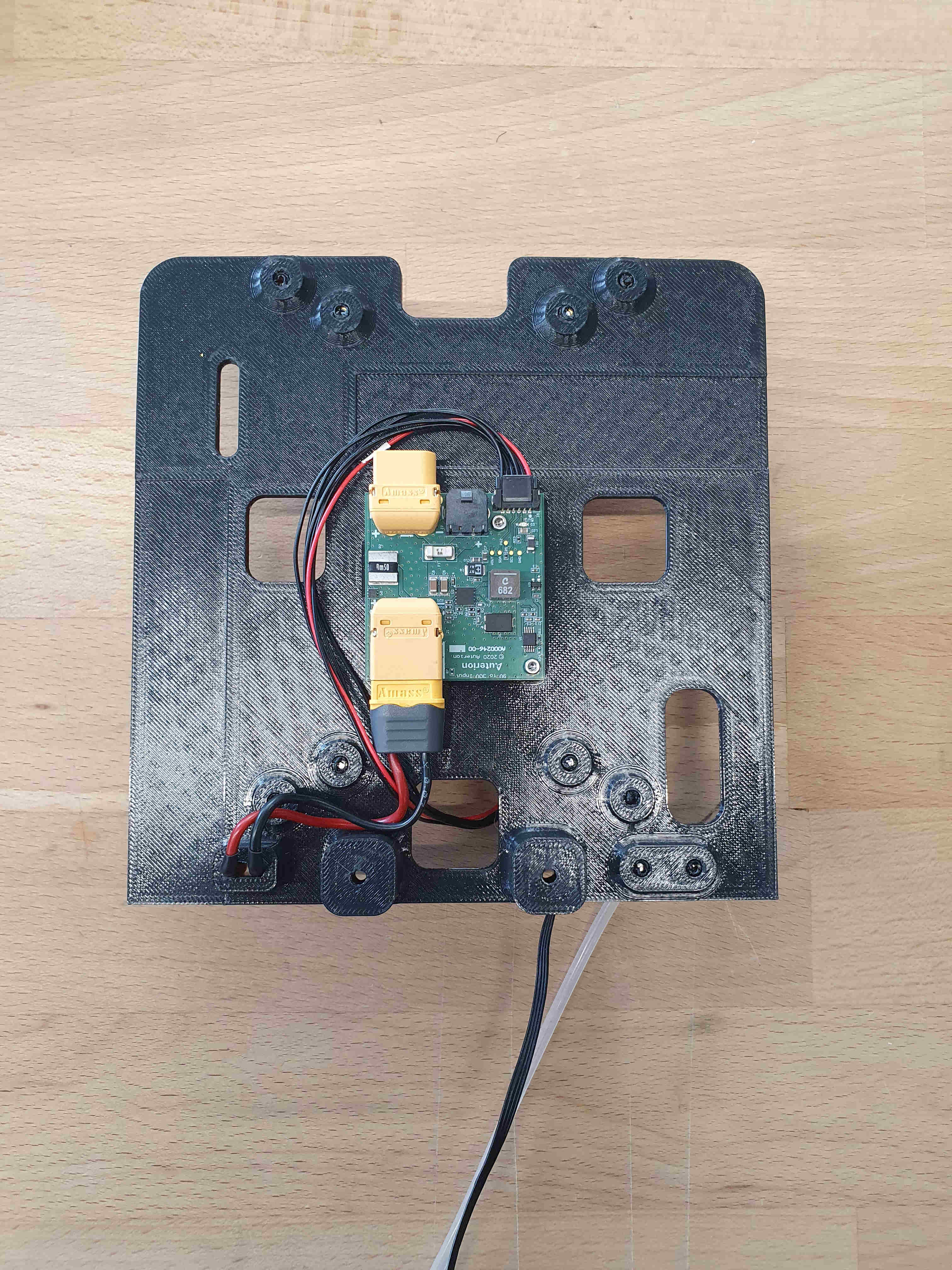
如有必要,还可通过安装在 6S 电池输入 XT60 旁的 XT30 将 PM 无线电端口的 10V 输出暴露出来。
传感器
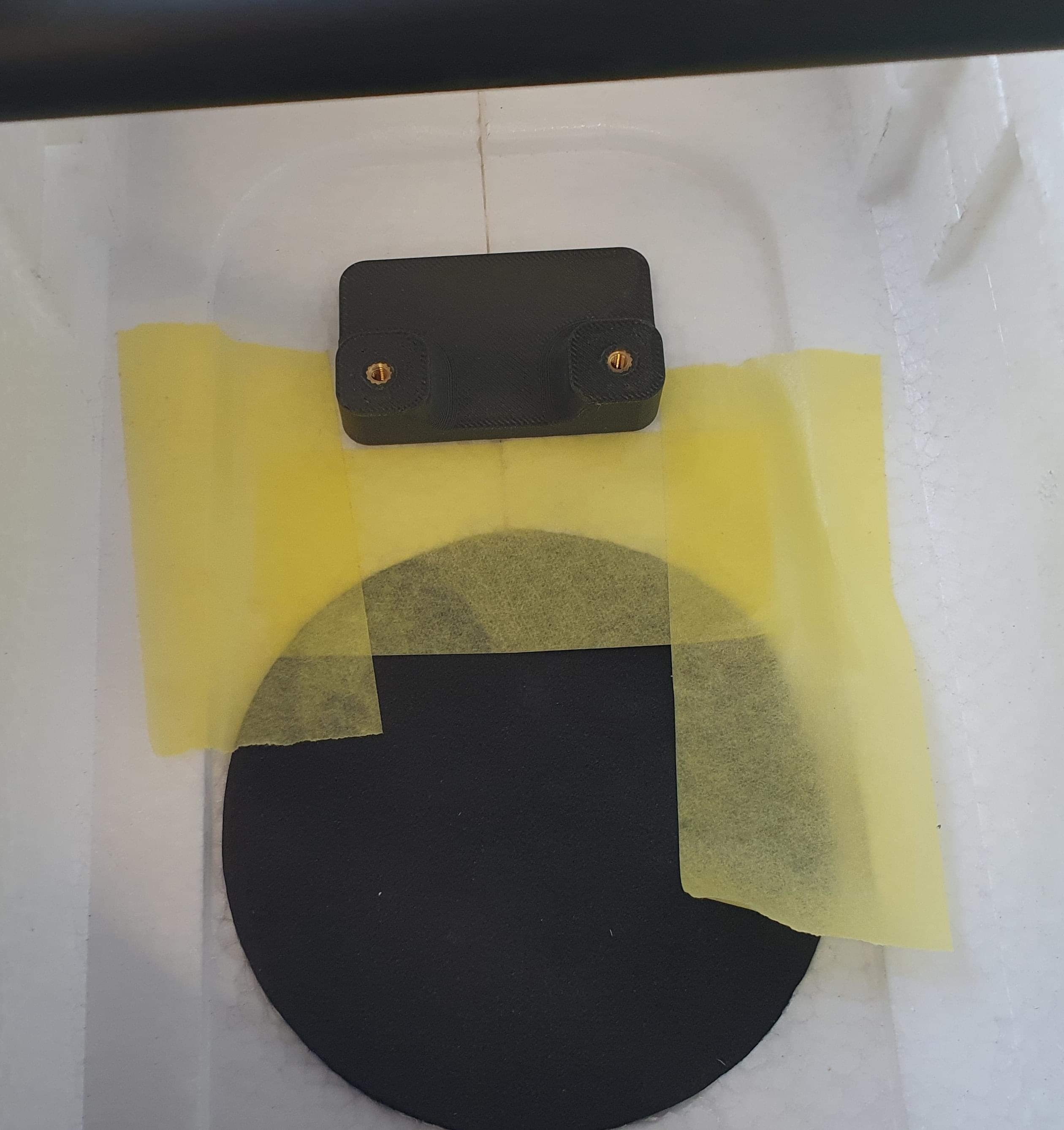
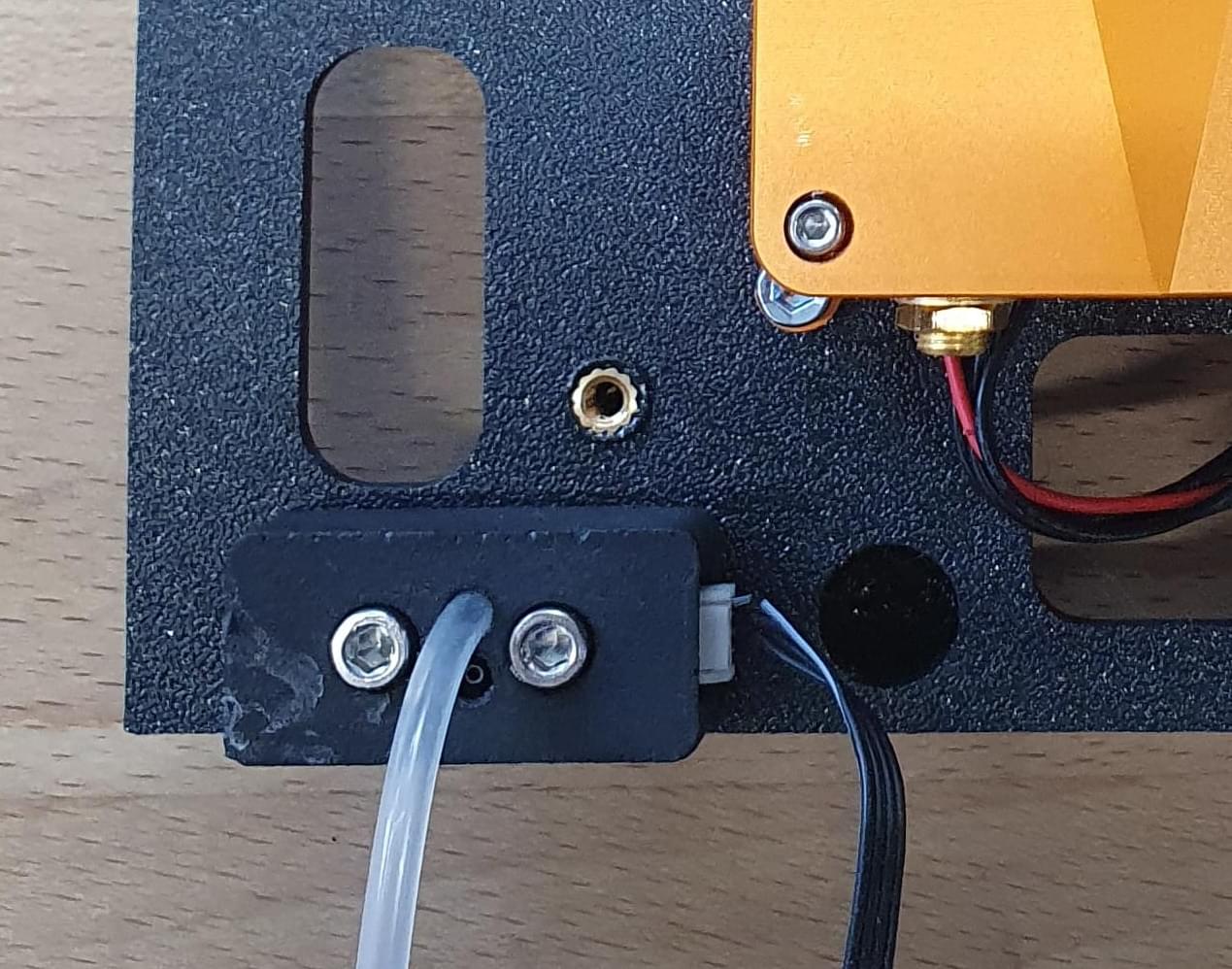
皮托管
传感器可使用 2 个 M3x16mm 螺丝安装在底板的右前角。注意将连接器朝向机身中央。
只使用了前面的管子(图中没有显示);其他管子可以去掉,因为我们的经验表明,机身内的压力足以作为静压。
当叠层安装在机身内时,需要将来自机翼的管子和来自空速传感器的管子拼接在一起。用唾液(这是最简单的方法)将它们推到一起,然后用热缩管加固连接。
警告
小心使用热源,因为泡沫在高温下会开始融化。
激光雷达
信息
建议安装激光雷达!如果没有安装激光雷达,则应禁止在悬停时使用固定翼驱动装置加速前进(设置为 vt_fwd_thrust_en 至 0 而不是 1).
用胶带或笔标出安装激光雷达的位置。在 PVC 外壳和泡沫塑料上开孔,以便激光雷达安装到位。

用热胶固定激光雷达。

全球定位系统/指南针
使用双面胶将 GPS 安装在载具后部的后门闩下方。

可以忽略 GPS 上的方向箭头。飞行控制器将在校准过程中检测方向。
飞行控制器
将 Pixhawk 或 Skynode 安装到底板上。
Pixhawk 6c/6c mini
- 使用双面胶将飞行控制器安装到底板上。
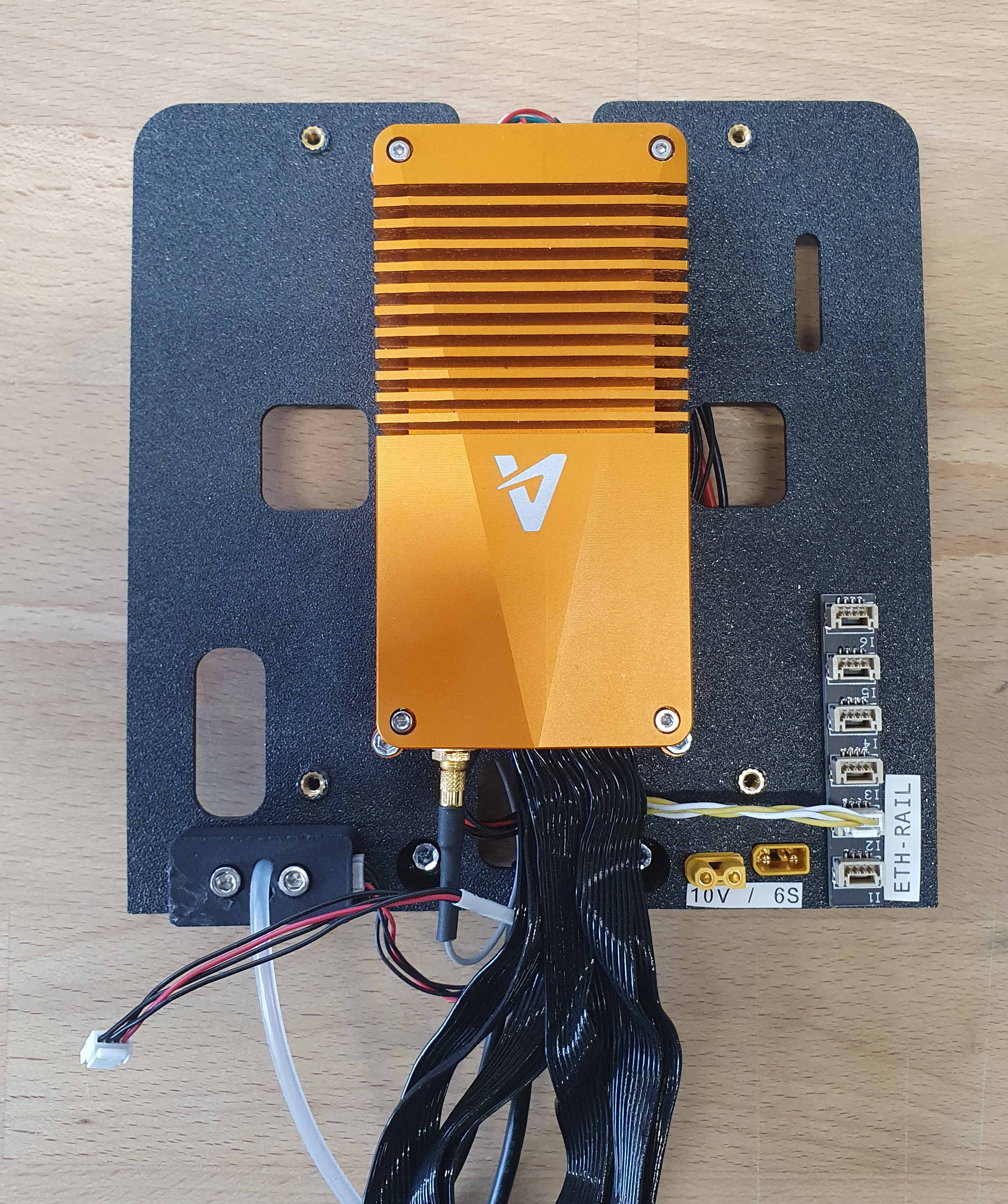
Skynode
- 使用 4 个 M3x8 螺钉将 Skynode 安装到底板上。确保"A"的顶部朝向载具前方。
- 将 40A 电源模块插入两个电源连接器中的上一个。
- 将一个(或必要时两个)USB 适配器插入 Skynode 背面的 4 针 JST-GH 接头,然后将其馈送到板的前面。用拉链将电缆固定到位。
- 将 I2C 分线器粘贴在底板右前侧(分线器可用于插入 ETH 设备,如无线电链路)。
- 将 I2C 分路器与 Skynode 背面的 ETH 端口相连。
- 将两根 40 针电缆插入 Skynode 前部。
- 插入 USB-C 延长线,然后将它弯到前面。弯曲时要非常紧,这样才能将板子装入车内。
适配器板
- 将 Pixhawk 适配器板拧到顶板上。
天线和遥控接收器
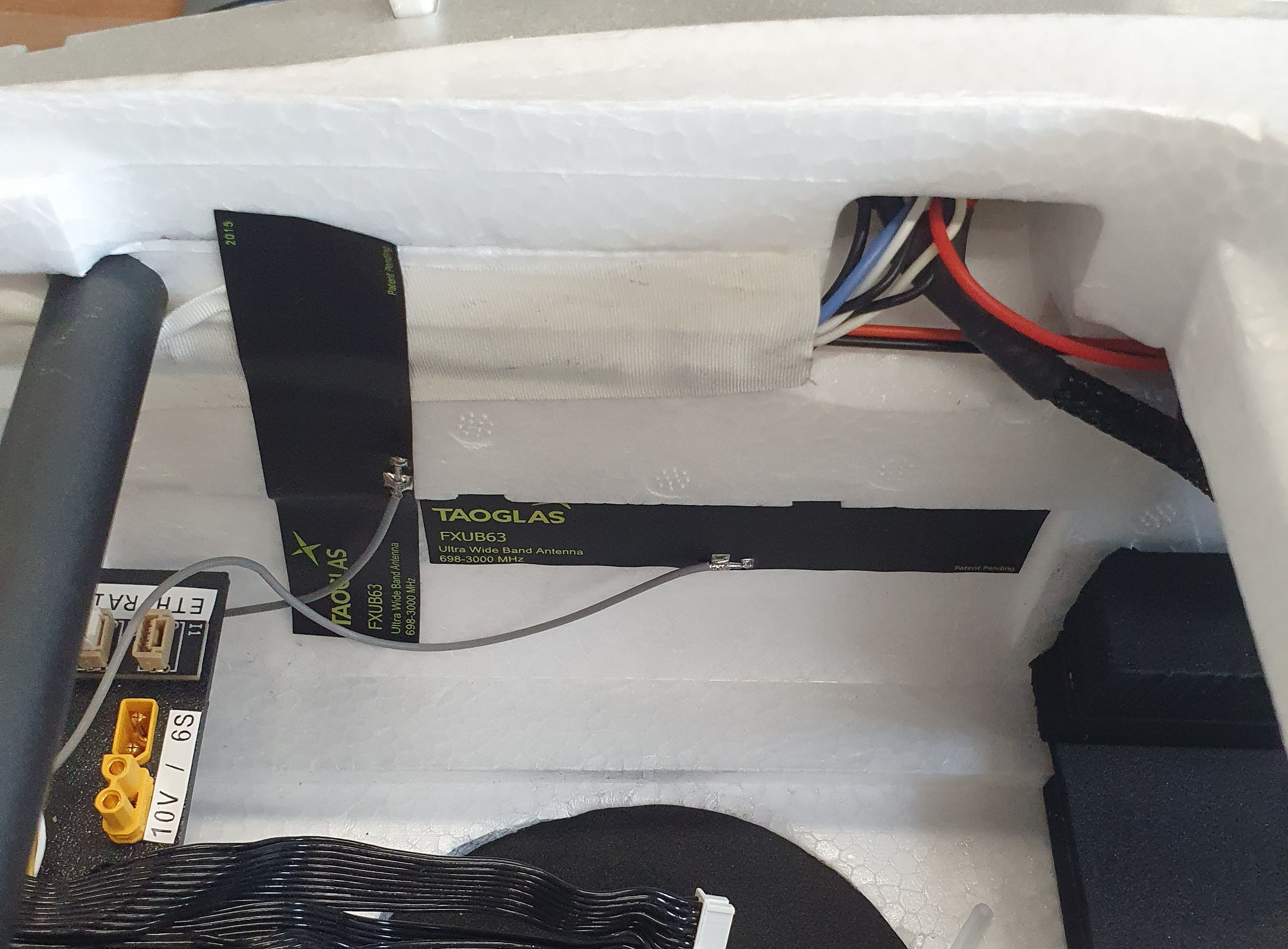
将 Skynode LTE 天线粘贴到机身侧面,如图所示:
如果使用无线电遥测模块,可以将天线安装在机身顶部。在前部,您可以直接安装天线延长线。

背面可以使用 3D 打印的天线适配器。可以用热胶将适配器粘在适当的位置。

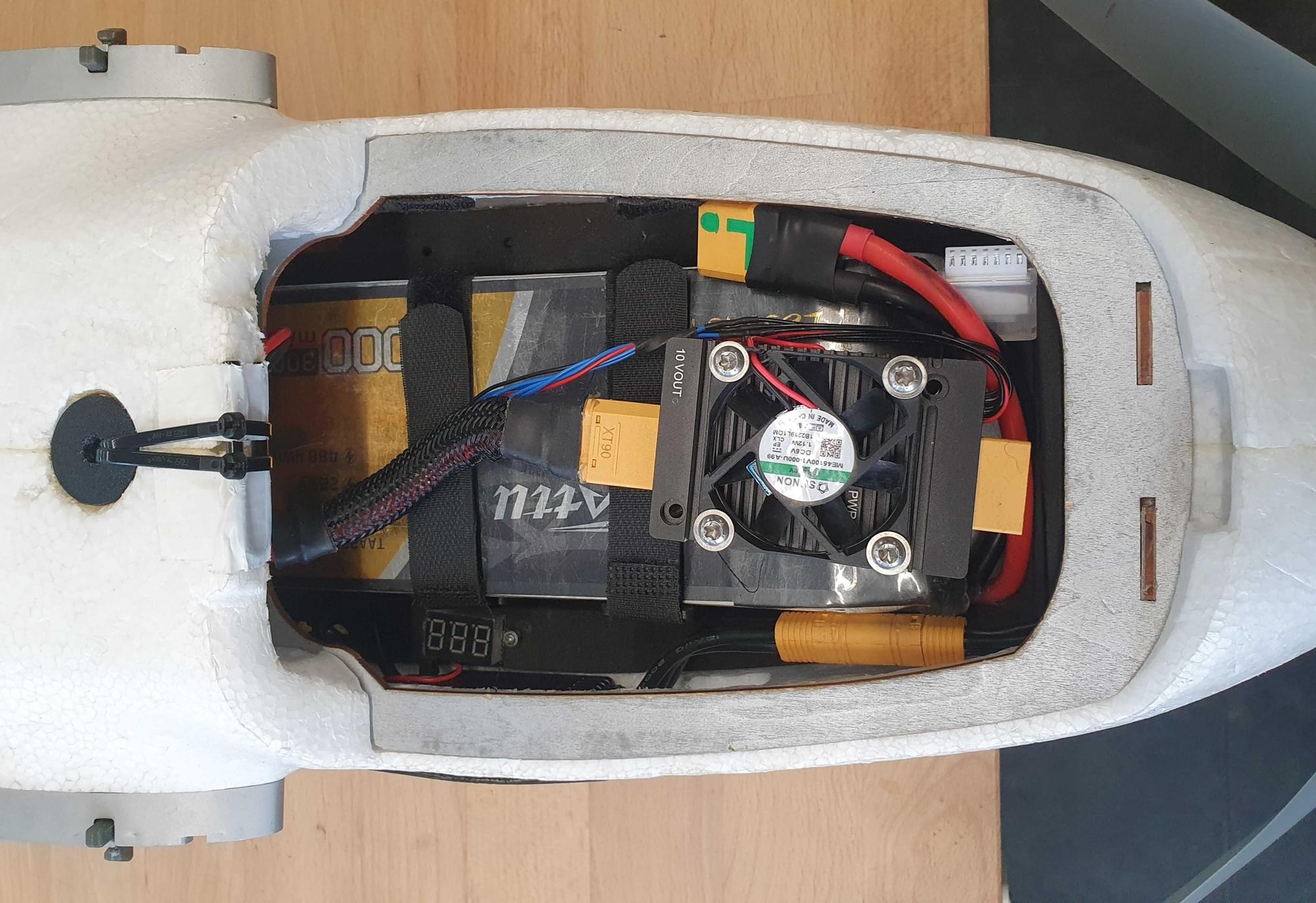
12S 电源模块
这个 12S 电源模块是电机的主电源模块。与用于为航空电子设备供电的 40A 电源模块相比,它可以处理更高的电流,而且由于 Loong 在悬停阶段需要使用高达 120A 的电流,因此也需要它。
12S 电源模块将安装在电池顶部。将安装在车内的 XT90 插入 PM。连接 Skynode 的电源线需要延长。这是获得电源模块电池读数所必需的。
电源模块可用作 Skynode 的 5V 备用电源。
装配
组装步骤如下
- 将底板滑入载具。
- 将 LTE 天线插入 Skynode。
- 将风扇安装座和无线电安装座拧到底板上。
- 将底板向后滑动,并用螺丝将其固定在堆叠夹具上。
- 将顶板放在堆栈顶部,然后将来自 Skynode 的 40 针电缆穿过 Pixhawk 适配器板前面的两个孔。
- 确保将顶部连接器连接到具有 GPS1' 输入的转接板上。
按以下顺序将推杆插入 Pixhawk 适配器板:
MAIN:
- 拉拔器电机
- 空,或风扇(如安装
- 右副翼
- 左副翼
- 电梯右侧
- 电梯左侧
- 舵
AUX:
- 电机前部右侧
- 电机后部左侧
- 左前电机
- 电机右后方
如果希望将执行机构连接到不同的输出端,则需要修改执行机构输出映射(请参阅 "执行机构输出映射")。 执行机构配置).
软件设置
选择机身
加载参数文件
接下来,我们加载一个 参数文件 该软件包含定义框架几何形状、输出映射和调整值的参数,因此您无需进行配置!如果您遵循了电机的接线说明,那么除了传感器校准和修正微调之外,您可能不需要做更多的配置。
加载文件:
传感器选择
- 如果 Lidar Lightware lw20-c(包含在 Skynode 评估套件中) 使用、 SENS_EN_SF1XX 需要设置为 6(SF/LW/20c)。
- 确保选择了正确的空速传感器。如果使用推荐的 SDP33 空速传感器 无需更改,因为 SENS_EN_SDP3X 已启用(设置为
1参数文件中的
传感器校准
首先确保设置 飞行控制器的正确方向.这应该是默认值 (旋转_无).
然后校准主要传感器:
RC 设置
我们建议您为以下文件中定义的一组模式分配 RC 开关 飞行模式配置> 我应该设置哪些飞行模式和开关?.特别是,您应该为 VTOL 转换开关, 关闭开关和一个开关来选择 稳定模式 和 位置模式.
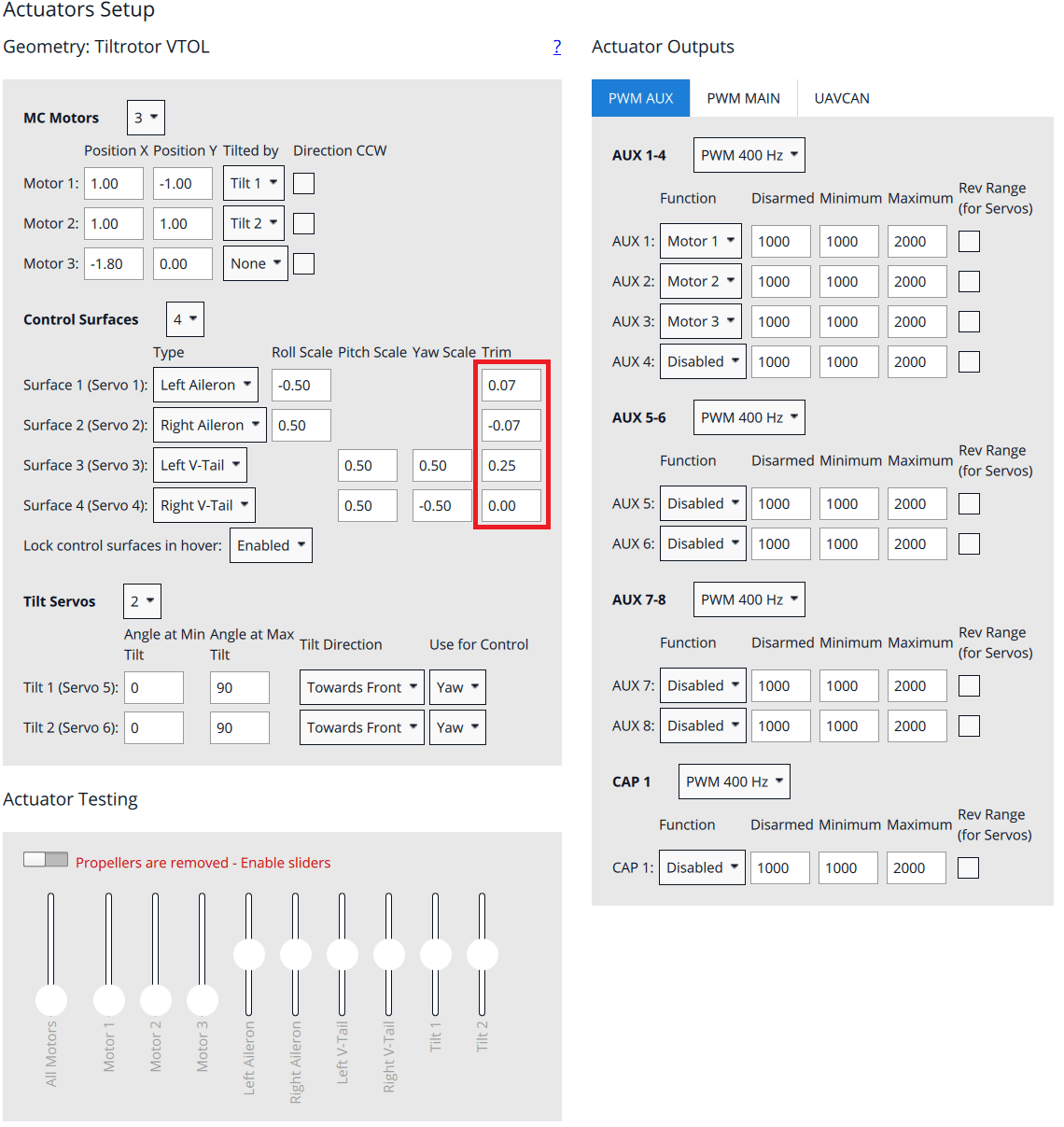
致动器设置和电调校准
警告
确保螺旋桨已卸下!电机很容易在执行器选项卡中意外启动。
在 QGroundControl 中配置电机、控制面和其他执行器。 执行器配置与测试.
参数文件 之前加载的内容意味着该屏幕的设置应该已经正确:您只需根据具体载具的情况进行调整。如果电机/伺服器连接的输出端与建议的不同,则需要更改执行器输出端部分的输出端到功能映射。
要校准 ESC',请在未连接机翼的情况下启动载具,然后进入 "校准 "模式。 致动器 选项卡。启用 "电机测试 "并将 "电机 "滑块调至最大。将机翼插入机身,等待哔哔声序列完成(约 5 秒)。然后将滑块调至最小。
控制面
检查是否需要使用遥控控制器反转执行机构:
- 切换到 手动模式
- 向右摇杆。右副翼应向上,左副翼应向下。
- 将杆向后倾斜(向上飞)。两个 V 形尾翼表面都应向上移动。
- 向右偏航。两个表面都应向右移动
现在调整微调值,使所有表面都处于中立位置。
电机方向和定位
在螺旋桨仍未拆下的情况下上膛载具。 稳定模式.检查所有四马达是否以类似的低空转速度旋转,并确认方向是否正确。检查以下反应:
- 向右转动摇杆。左侧的两个电机应该启动
- 滚动杆到后面。前面的两个电机应该启动
- 向右偏航。右前和左后发动机应启动
信息
如果看不到反应,就稍微加大油门。 Airmode 不为偏航轴启用。
首次飞行
- 安装螺旋桨(使用蓝色 Loctite 螺钉)。
- 检查重心 (GG)。检查重心时,用两根手指从连接机翼的插销处向上提起载具。飞行器应保持水平平衡。如果飞行器向尾部或机头倾斜,则需要将电池向相反方向移动。如果用这种方法无法平衡飞行器,则需要调整某些部件的位置或增加重量以平衡飞行器。
- 检查传动器方向和中位调整
- 检查控制面板在 稳定模式.将飞行器切换到前向飞行模式。
- 将载具向右翻滚。右副翼应向下。左副翼应向上。
- 将载具向上倾斜(车头向上)。两个升降舵都应向下。
- 向右偏转飞行器(机头向右)。两个升降舵都应向左。
- 如果一个 开关 使用时,确保其工作正常,不会在飞行中意外启动!
- 手臂 稳定模式 并检查电机是否响应命令,例如,向左滚动会增加右侧电机的油门
- 起飞 稳定模式 并进行一些基本操作
- 如果一切顺利,将在 位置模式 并在 50 米左右进行过渡。如果出现问题,尽快切换回多旋翼模式(使用过渡开关)。