将 PX4 引导加载程序闪存到 Betaflight 系统上
本页记录了如何将 PX4 引导加载程序闪存到已闪存 Betaflight 的电路板上(例如 OmnibusF4 SD 或 卡库特 F7).
有三种工具可用于闪存 PX4 引导加载程序: Betaflight 配置器, dfu-util 命令行工具或图形 dfuse (仅限 Windows)。
信息
Betaflight 配置器 最简单,但新版本可能不支持非 betaflight 引导加载程序更新。您可以先尝试一下,如果固件更新不起作用,再使用其他方法。
Betaflight 配置器引导加载程序更新
信息
Betaflight 配置器 可能不支持 PX4 引导加载程序更新(截至 2023 年 5 月)。旧版本应该可以工作,但具体版本不详。
要安装 PX4 引导加载程序,请使用 Betaflight 配置器:
下载或构建 引导加载器固件 您要闪存的电路板。
下载 Betaflight 配置器 您的平台。
TIP
如果使用 铬 一个简单的跨平台替代方法是将配置器安装为一个 从这里扩展.
将电路板连接到电脑,然后启动配置器。
按下 加载固件 [本地] 按钮
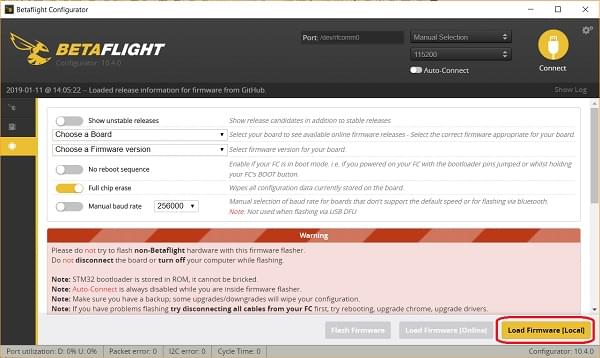
从文件系统中选择启动加载程序二进制文件,然后闪存电路板。
现在应该可以在电路板上安装 PX4 固件了。
DFU 引导加载程序更新
本节将介绍如何使用闪存编程器闪存 PX4 引导加载程序。 dfu-util 或图形 dfuse 工具(仅限 Windows)。
您首先需要下载或构建 引导加载器固件 您要闪存的电路板(以下称为 目标.bin>;).
信息
下面的所有方法都是安全的,因为 STM32 MCU 不会变砖!DFU 无法被闪存覆盖,即使闪存失败,也始终允许您安装新固件。
DFU 模式
这两种工具都要求电路板处于 DFU 模式。要进入 DFU 模式,请在将 USB 电缆连接到计算机时按住启动按钮。可在电路板通电后松开按钮。
dfu-util
信息
Holybro Kakute H7 v2 和微型飞行控制器可能要求您首先运行附加命令来擦除闪存参数(以解决参数保存问题):
dfu-util -a 0 --dfuse-address 0x08000000:force:mass-erase:leave -D build/<target>/<target>.bin该命令可能会产生错误,可以忽略。完成后,再次进入 DFU 模式完成常规闪存。
将引导加载程序闪存到飞行控制器上:
dfu-util -a 0 --dfuse-address 0x08000000 -D build/<target>/<target>.bin重新启动飞行控制器,无需按住启动按钮即可启动。
dfuse
在这里可以找到 dfuse 手册: https://www.st.com/resource/en/user_manual/cd00155676.pdf
使用该工具闪存 目标>.bin 锉刀
引导加载器固件
上述工具可闪存预置的引导加载器固件。大多数目标可使用正常的 PX4 源代码构建引导加载器固件,而其他目标只能使用引导加载器资源库中的源代码构建。
装有 PX4-Autopilot 引导程序的飞行控制器 生产 可以从 PX4-Autopilot 源码构建引导加载程序。运行以下命令可获得适用于该功能的控制器列表 生产 命令,并注意到 生产 以 _bootloader
$make list_config_targets
...
cuav_nora_bootloader
cuav_x7pro_bootloader
cubepilot_cubeorange_bootloader
holybro_durandal-v1_bootloader
holybro_kakuteh7_bootloader
holybro_kakuteh7v2_bootloader
holybro_kakuteh7mini_bootloader
matek_h743-mini_bootloader
matek_h743-slim_bootloader
modalai_fc-v2_bootloader
mro_ctrl-zero-classic_bootloader
mro_ctrl-zero-h7_bootloader
mro_ctrl-zero-h7-oem_bootloader
mro_pixracerpro_bootloader
px4_fmu-v6u_bootloader
px4_fmu-v6x_bootloader要为这些飞行控制器构建,请下载并构建 PX4-自动驾驶仪源然后使用以下命令创建目标:
Git 复制 --递归 https://github.com/PX4/PX4-Autopilot.git
CD PX4-自动驾驶仪
生产 <;油料t>; # 例如:Holybro_kakuteh7mini_bootloader如需其他飞行控制器,请下载 PX4/Bootloader 资源库,并使用适当的目标构建源代码:
git clone --recursive https://github.com/PX4/Bootloader.git
cd 引导程序
make <target> # 例如:omnibusf4sd_bl 或 kakutef7_bl重新安装 Betaflight
为了切换回 Betaflight:
- 备份 PX4 参数。您可以通过以下方式进行备份 出口 将它们存储到 SD 卡中。
- 保持 引导程序 在连接 USB 电缆时按下按钮
- 闪光灯 Betaflight 像往常一样 Betaflight-configurator