安装飞行控制器
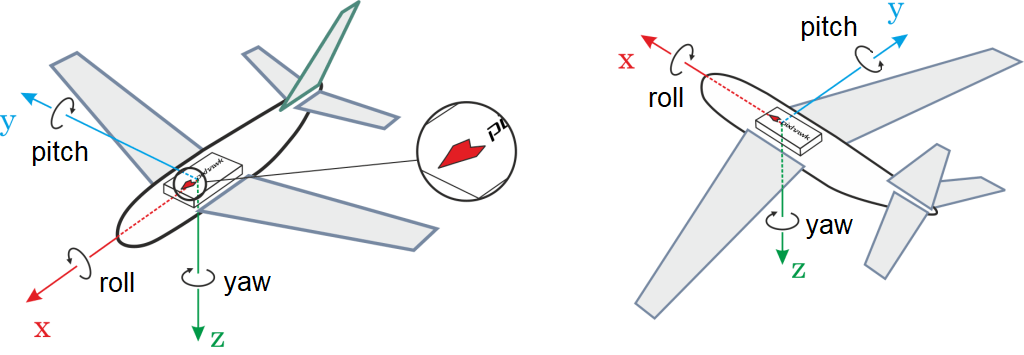
飞行控制器应尽可能靠近重力中心 (CoG) 放置在机架上,顶部朝上,并使其方向与重力中心 (CoG) 一致。 航标箭头 指向车头。 振动隔离 经常需要这样做,您应遵循制造商的建议。如果以这种方式安装,则无需进一步配置 PX4。
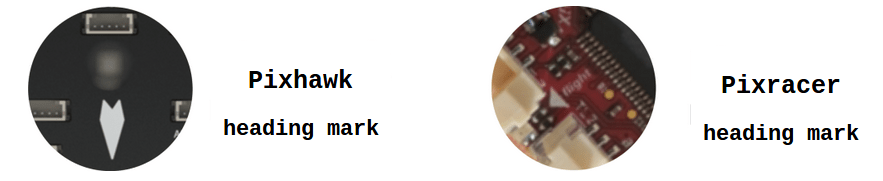
定向
几乎所有的飞行控制器都有一个 航标箭头 (如下图所示)。控制器应从上往下放置在机架上,方向箭头应指向飞行器的前方(适用于所有飞行器机架--飞机、多旋翼飞行器、VTOL、地面飞行器等)。
信息
如果由于物理限制无法按照推荐/默认方向安装控制器,则需要按照实际使用的方向配置自动驾驶仪软件: 飞行控制器定向.
定位(POSITION)
飞行控制器应尽可能靠近重心放置在框架上。
如果您不能将控制器安装在这个位置,那么您应该 配置 使用以下参数设置相对于 CoG 的偏移量: EKF2_IMU_POS_X, EKF2_IMU_POS_Y, EKF2_IMU_POS_Z (默认的 EKF2 估计器)。
请注意,如果不设置这些偏移量,那么 EKF2 的位置/速度估计值将位于 IMU 位置而非 CoG 位置。这可能会导致不理想的振荡,具体取决于 IMU 与 CoG 的距离有多远。
说明
要了解不设置这些偏移量的影响,请考虑以下情况:飞行控制器(IMU)位于 CoG 前方,您在定位模式下飞行,CoG 周围有向前俯仰的运动。高度估计值会下降,因为 IMU 事实上已经向下移动。作为反应,高度控制器将提供更大的推力进行补偿。振幅取决于 IMU 与 CoG 之间的距离。这可能可以忽略不计,但仍会持续施加一些不必要的控制力。如果指定了偏移量,那么纯俯仰运动将不会对高度估计值产生任何变化,因此寄生修正会减少。
振动隔离
内置加速度计或陀螺仪的飞行控制板对振动非常敏感。有些电路板具有内置隔振功能,而有些则带有 安装泡沫 可用于将控制器与载具隔离。
 减震泡沫
减震泡沫
应使用飞行控制器文档中推荐的安装策略。
TIP
利用飞行回顾和振动进行日志分析 说明如何测试振动水平是否可接受,以及 振动隔离 如果出现问题,建议采用多种可能的解决方案。