返回模式(多旋翼飞行器)
")
返回 飞行模式用于 安全飞行 在畅通无阻的道路上飞往安全目的地,并在那里着陆。
多旋翼飞行器使用 原点/赛点返回类型 默认情况下。在这种返航类型中,如果需要,飞行器会上升到高于障碍物的安全高度,直接飞到最近的安全着陆点(集合点或原点),下降到下降高度,短暂等待,然后着陆。返航高度、下降高度和着陆延迟通常设置为保守的安全值,但也可根据需要进行更改。
多旋翼飞行器支持 其他 PX4 返回类型包括任务着陆、任务路径和最近的安全目的地。建议使用默认类型。
信息
技术摘要
多旋翼飞行器使用 原点/赛点返回类型 为默认值。对于此返回值,请键入直升机:
- 登上 最低返航高度 (安全地高于任何预期障碍物)。如果飞行器的初始高度高于最小返回高度,则保持初始高度。
- 通过一条直接的恒定高度路径飞往安全着陆点,该着陆点将是所有集结点中最近的一个,也是原点。
- 在到达目的地后,它迅速下降到下降高度(quot;descent altitude")。rtl_descend_alt).
- 它会等待一个可配置的时间 (RTL_LAND_DELAY),可用于展开起落架。
- 然后降落。
最低返航高度
默认情况下 最低返航高度 使用 RTL_RETURN_ALT,载具就会以较高的速度返回。 RTL_RETURN_ALT 或初始飞行高度。
最小返回高度可通过以下方式进一步配置 RTL_CONE_ANG它与 RTL_RETURN_ALT 定义了一个以目的地着陆点为中心的半锥角。当返回模式在目的地附近执行时,锥角可以降低最小返回高度。这在目的地附近障碍物较少时非常有用,因为它可以降低飞行器着陆前需要上升的最低高度,从而降低耗电量和着陆时间。
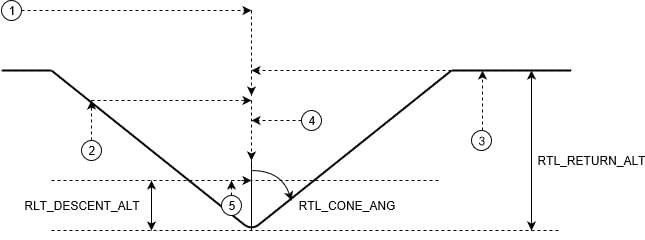
如果在由最大锥体半径和最小锥体半径定义的圆柱体内触发返回模式,锥体会影响最小返回高度。 RTL_RETURN_ALT:本气缸外 RTL_RETURN_ALT 使用。在代码中,最小返回高度是载具位置与锥体的交点,或 rtl_descend_alt (以较高者为准)。换句话说,载具必须始终上升到至少 rtl_descend_alt 如果低于该值。
有关该返回类型的更多信息,请参阅 原点/集结点返回类型 (RTL_TYPE=0)
参数
RTL 参数列于 参数参考 > 返回模式.
与多旋翼飞行器有关的参数(假设 RTL_TYPE 设置为 0)如下。
| 参数 | 说明 |
|---|---|
| RTL_RETURN_ALT | 以米为单位返回高度(默认值:60 米),当 RTL_CONE_ANG 如果已经超过该值,载具将以当前高度返回。 |
| rtl_descend_alt | 最小返回高度和飞行器从较高返回高度减缓或停止初始下降的高度(默认值:30 米) |
| RTL_LAND_DELAY | 时间徘徊在 rtl_descend_alt 着陆前(默认值:0.5 秒)--默认情况下,这段时间很短,因此飞行器只需减速然后立即着陆。如果设置为-1,系统将在 rtl_descend_alt 而不是着陆。提供延迟是为了让您配置起落架展开(自动触发)的时间。 |
| RTL_MIN_DIST | 从原点上升到锥体指定的返回高度时的最小水平距离。如果飞行器与原点的水平距离小于这个距离,则会以当前高度或 rtl_descend_alt (以较高者为准),而不是先升至 RTL_RETURN_ALT)。 |
| RTL_CONE_ANG | 定义飞行器 RTL 返回高度的锥体的半角。值(单位:度):0, 25, 45, 65, 80, 90.请注意,0 表示没有锥度(始终在以下高度返回 RTL_RETURN_ALT 或更高),而 90 则表示载具必须在当前高度或 rtl_descend_alt (以较高者为准)。 |
| com_rc_override | 控制在多旋翼飞行器(或 多旋翼 模式下的 VTOL)上移动摇杆是否会导致模式切换为 位置模式 (载具正在处理关键电池故障保护时除外)。该功能可分别在自动模式和离车模式下启用,默认在自动模式下启用。 |
| com_rc_stick_ov | 杆的移动量会导致过渡到 位置模式 (如果 com_rc_override 已启用)。 |