距离传感器(测距仪)
距离传感器提供距离测量,可用于 以下地形, 地形保持 (即精确悬停摄影),改进着陆行为(即条件范围援助)、警告规定的高度限制、预防碰撞等。
本节列出了 PX4 支持的距离传感器(可链接到更详细的文档),以及 PX4 的 通用配置 所有测距仪都需要、 测试和 Gazebo-经典模拟 信息。更详细的设置和配置信息请参阅下面(和侧边栏)链接的主题。



支持的测距仪
ARK 流量
ARK 流量 是一个开源的飞行时间(ToF)和光学流量传感器模块,能够测量 8 厘米到 30 米的距离。它可以通过 CAN1 端口连接到飞行控制器,也可以通过 CAN2 端口连接其他传感器。它支持 DroneCAN运行 PX4 DroneCAN 固件而且外形小巧。
Holybro ST VL53L1X 激光雷达
VL53L1X 是一款先进的飞行时间(ToF)激光测距传感器,增强了 ST FlightSense™ 产品系列。它是市场上速度最快的微型 ToF 传感器,精确测距达 4 米,快速测距频率达 50 赫兹。
它配备了一个 JST GHR 4 针连接器,可兼容 Pixhawk 4, Pixhawk 5X以及其他飞行控制器,它们遵循 Pixhawk 连接器标准).
激光雷达
激光雷达 是一款结构紧凑的高性能光学远距离测量测距仪。它的传感器量程为(5 厘米 - 40 米),可连接到 PWM 或 I2C 端口。
MaxBotix I2CXL-MaxSonar-EZ
MaxBotix I2CXL-MaxSonar-EZ 该测距仪有许多射程相对较短的声纳测距仪,适用于辅助起飞/着陆和避免碰撞。可以使用 I2C 端口连接这些设备。
使用参数 SENS_EN_MB12XX.
Lightware 激光雷达
Lightware SFxx 激光雷达 提供适用于多种无人机应用的各种轻型激光高度计。
PX4 支持SF11/c 和 SF/LW20。PX4 还可用于以下停产型号:SF02、SF10/a、SF10/b、SF10/c。
PX4 还支持 LightWare 激光雷达 SF45 旋转激光雷达 对于 预防碰撞 应用。
TeraRanger 测距仪
TeraRanger 提供了许多基于红外飞行时间(ToF)技术的轻型距离测量传感器。它们通常比声纳速度更快、范围更大,比基于激光的系统更小、更轻。
PX4 支持通过 I2C 总线连接的以下型号:TeraRanger One、TeraRanger Evo 60m 和 TeraRanger Evo 600Hz。
爱因斯坦 US-D1 标准雷达高度计
爱因斯坦 US-D1 标准雷达高度计 是一种紧凑型微波测距仪,经过优化后可用于无人机。它的感应范围约为 50 米。该产品的一个特别优势是,它可以在各种天气条件下和各种地形(包括水面)上有效工作。
LeddarOne
LeddarOne 这是一种小型激光雷达模块,具有窄而漫射的光束,整体探测范围广,性能卓越,封装坚固可靠,性价比高。它的感应范围从 1 厘米到 40 米不等,需要与 UART/串行总线连接。
TFmini
Benewake TFmini 激光雷达 是一款微型、低成本、低功耗激光雷达,射程达 12 米。
PSC-CM8JL65-CC5
蓝宝 PSK-CM8JL65-CC5 ToF 红外测距传感器 是一款非常小巧的红外距离传感器(38 毫米 x 18 毫米 x 7 毫米,重 10 克),量程为 0.17 米至 8 米,分辨率为毫米。它必须与 UART/串行总线相连。
航空电子设备匿名 UAVCAN 激光高度计接口
航空电子设备匿名 UAVCAN 激光高度计接口 允许几种常见的测距仪(例如 Lightware SF11/c、SF30/D等)连接到 CAN 途经 DroneCAN这是一个比 I2C 更强大的接口。
配置/设置
测距仪通常连接到串行(PWM)或 I2C 端口(取决于设备驱动程序),并通过设置特定参数在端口上启用。
硬件和软件设置 针对每个距离传感器 在各自的主题中都有涉及。
的通用配置。 所有距离传感器通用下文介绍了实际安装和使用情况。
通用配置
普通测距仪配置使用 EKF2_RNG_* 参数。这些参数包括(并非详尽无遗):
- EKF2_RNG_POS_X, EKF2_RNG_POS_Y, EKF2_RNG_POS_Z - 测距仪与载具重心在 X、Y、Z 方向的偏移量。
- EKF2_RNG_PITCH - 0 度(默认值)表示测距仪与载具纵轴完全对齐(即笔直向下),而 90 度表示测距仪指向前方。如果使用的是非零俯仰角,则使用简单的三角法计算与地面的距离。
- EKF2_RNG_DELAY - 数据从传感器到达估计器的大致延迟时间。
- EKF2_RNG_SFE - 测距仪的范围取决于噪声缩放器。
- EKF2_RNG_NOISE - 测距仪融合的测量噪声
测试
测试测距仪最简单的方法是改变测距范围,然后与 PX4 检测到的数值进行比较。下面的章节介绍了一些获取测量范围的方法。
QGroundControl MAVLink 检查器
QGroundControl MAVLink 检查器 您可以查看从载具发送的信息,包括 距离传感器 测距仪提供的信息。这两种工具的主要区别在于 分析 工具可以在图表中绘制数值。
信息
发送的信息取决于载具配置。您只会收到 距离传感器 如果连接的载具安装了测距仪,并正在发布传感器值,则会显示信息。
查看测距仪输出:
打开菜单 Q > 选择工具 > 分析工具:
选择信息
距离传感器然后选中绘图复选框当前距离.然后,该工具将绘制出结果: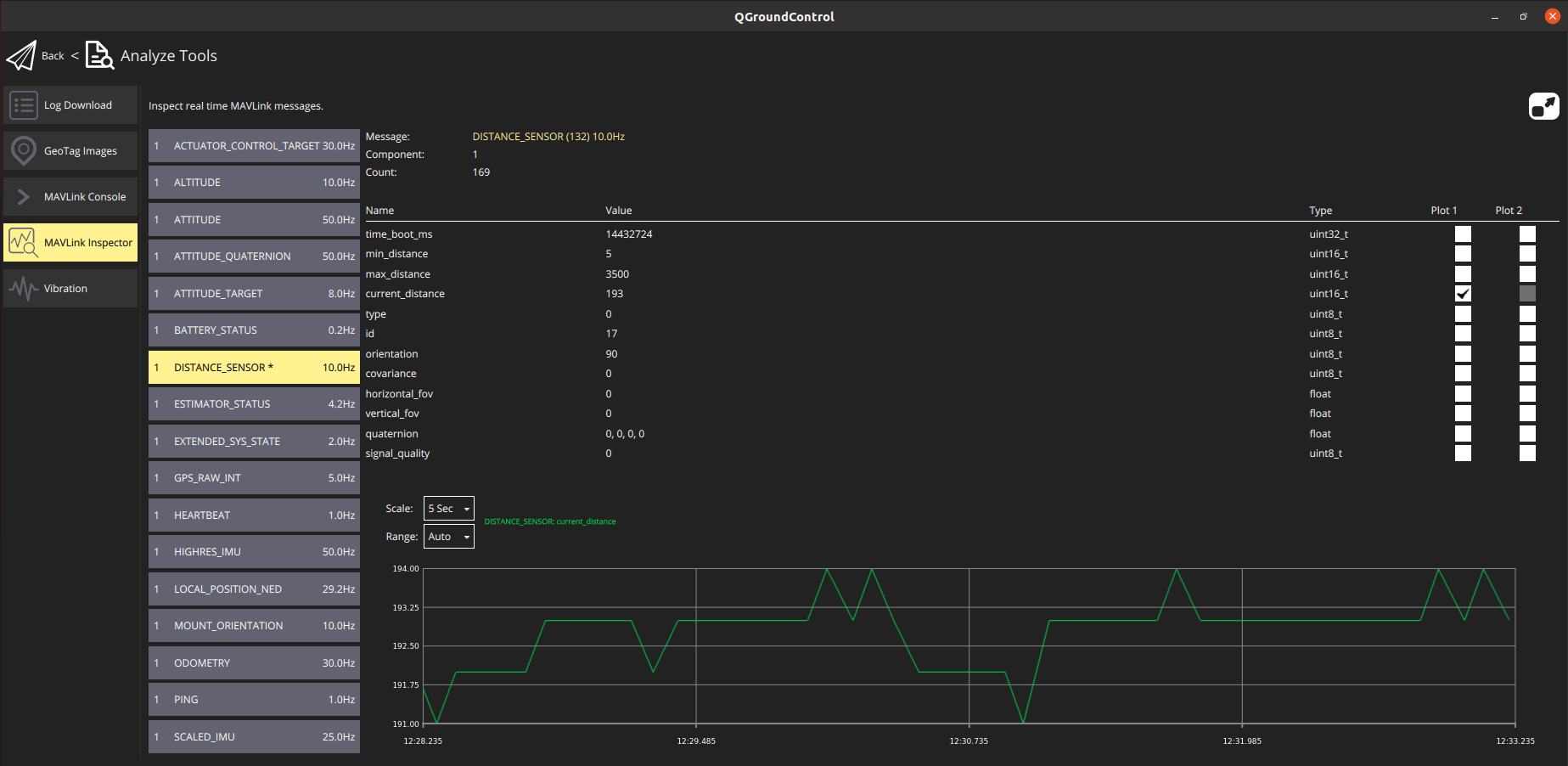
QGroundControl MAVLink 控制台
您还可以使用 QGroundControl MAVLink 控制台 观察 距离传感器 uORB 主题:
听众 距离传感器 5信息
QGroundControl MAVLink 控制台 在连接到 Pixhawk 或其他 NuttX 目标时有效,但在模拟器上无效。在模拟器上,您可以直接在终端运行命令。
欲了解更多信息,请参阅 开发> 调试/日志> 使用监听器命令调试传感器/主题.
炯炯有神--经典模拟
激光雷达和声纳测距仪可用于 经典仿真场景Gazebo 模拟器。为此,您必须使用包含测距仪的载具模型启动模拟器。
虹膜光流模型包括一个激光雷达测距仪:
生产 px4_sitl gazebo-classic_iris_opt_flowTyphoon_h480 包括一个声纳测距仪:
生产 px4_sitl 经典台风 H480如果您需要使用不同的飞行器,可以在其配置文件中包含该模型。您可以在鸢尾和台风各自的配置文件中看到如何操作:
- xml
<;包括>; <;uri>model://lidar</uri>; <;姿势>-0.12 0 0 3.1415 0</姿势>; </包括>; <;关节 名字="lidar_joint"; 类型="旋风";>; <;孩子>lidar::link</孩子>; <;父母>iris::base_link</父母>; <;轴线>; <;xyz>0 0 1</xyz>; <;限额>; <;鞋帮>0</鞋帮>; <;降低>0</降低>; </限额>; </轴线>; </关节>; - xml
<;包括>; <;uri>model://sonar</uri>; </包括>; <;关节 名字="sonar_joint"; 类型="旋风";>; <;孩子>声纳模型::链接</孩子>; <;父母>typhoon_h480::base_link</父母>; <;轴线>; <;xyz>0 0 1</xyz>; <;限额>; <;鞋帮>0</鞋帮>; <;降低>0</降低>; </限额>; </轴线>; </关节>;