涡轮木材进化(TTE)构建
Turbo Timber Evolution 是 Horizon Hobby 出售的一款模型,最初用于经典的视距遥控模型飞行。该模型设计用于 STOL 飞行,并具有许多显著特征,这些特征也使其成为改装成 FPV PX4 平台的理想候选者。

概述
此次建造的目标是创建一个可用于一般 PX4 测试/开发的平台。这一设计目标意味着需要有代表传统飞机的自然平衡控制。由于经典遥控飞机通常设计为手动飞行,不使用计算机增强飞行控制,因此它们往往专门设计为在开箱后就能很好地修整和平衡。这些飞机也更注重确保其在空中的操控性。虽然即使是最简单的泡沫板飞机也能飞起来,但在空中操控方面的很多细微差别都可以通过更多的工程努力来改善。这架飞机就是一个很好的例子,它的副翼可以最大限度地减少偏航。
机身主要特点
- 宽敞的内部空间
- 顶部电池舱门
- 可选的前缘板条
- 福勒襟翼
- 带转向尾轮的坚固起落架
- 预装室外照明
- 可选浮筒
- 温和的飞行特性
- 内部连杆和最小突起带来低阻力
主要建筑特点
整体建造简单,机身设置最少
轻松连接 Pixhawk USB 和调试连接器
第一人称视角 (FPV) 带摄像机摇摄支架
空气数据由机翼悬挂式皮托管静态吊舱提供
飞行时间长(可选锂离子电池 > 24 分钟)
部件清单
Pixhawk 4 Mini (带 GPS 和电源模块)
MS4525DO 差压模块和皮托管
- Pixhawk 4 Mini 支架和顶部 GPS 支架
- FPV 吊舱和相机支架
- 皮托管静态吊舱和机翼硬点吊架
其他硬件M3 硬件(支座、垫圈、螺栓)、XT30 连接器、热胶、热缩管、Molex Microfit 连接器
硅胶接线(14 号线用于大电流,16 号线用于小电流,22 号线用于小功率和信号)
3.6Ah 4S 锂电池或 4s2p 18650 锂离子电池
机身制造
飞行器开箱时已接近完成。舵机和连杆已经安装完毕,剩下的工作就是安装起落架和水平稳定器。对于这部分组装工作,只需按照手册进行即可。
信息
一些报告 表示,与飞机捆绑在一起的原装电调存在过热问题。
由于这次组装的重量特别大,因此可能需要电调提供更高的平均功率,因此在测试过程中将原有的 60A 电调更换为 80A 的 Turnigy PLUSH-32。原装电机也换成了 更大功率电机.原装螺旋桨被换成了 装甲运兵车 13x4 与原有的三叶螺旋桨相比,效率更高。这种新型电调、电机和螺旋桨组合在测试中表现出色。
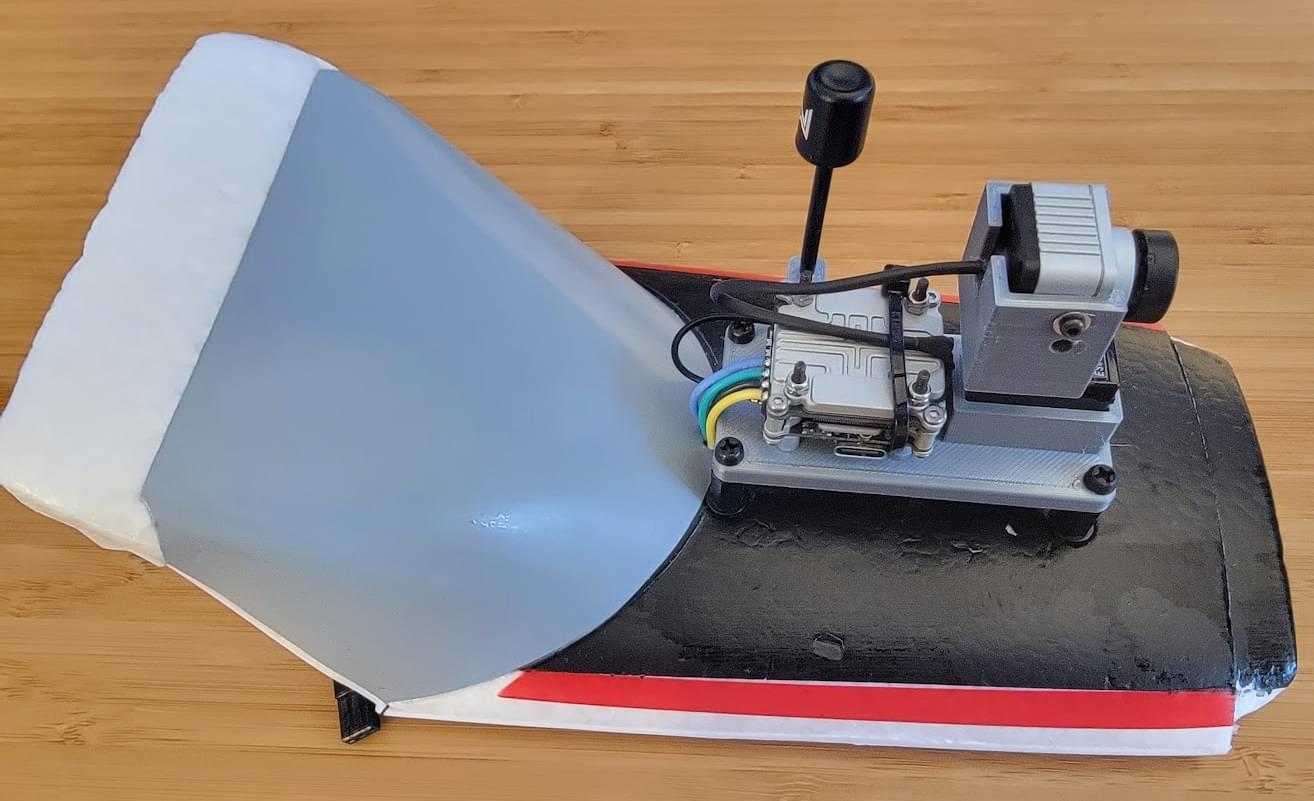
FPV 吊舱
FPV 吊舱使用 M3 尼龙硬件安装在电池舱顶部。将 FPV 吊舱放在顶部(注意用尺子对准中心),然后用螺丝刀在泡沫塑料上打穿 FPV 吊舱的安装孔。然后用一个长的 M3 尼龙螺钉和一个垫圈固定在底部,再用一个垫圈和支座固定在电池舱盖的顶部,这样就可以安装 FPV 吊舱了。
皮托管
一个 空速传感器 强烈建议在固定翼飞行器上使用。此构建使用 MS4525DO 压差模块和皮托管,安装在一个 3D 打印吊舱中,吊舱上有一个用于将其连接到机翼的硬点吊架。

在皮托管内,MS4525DO 压差传感器与皮托管/静压管之间用一根短管连接。拉链被用作软管夹,以防止软管从传感器和皮托管端口上脱落。i2c 和电源线直接焊接到 MS4525 模块上,然后用热熔胶对连接处进行机械加固。

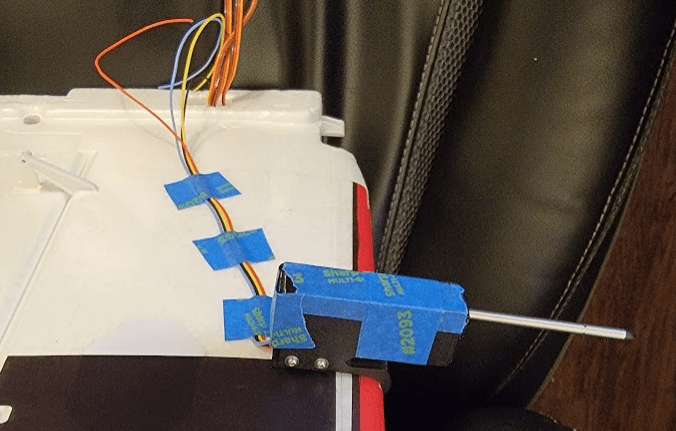
利用粘在机翼前缘的 3D 打印吊架,将皮托管/静压差传感器安装在机翼上(螺旋桨半径之外)。一个 M2 螺钉和尼龙锁将吊舱固定在吊架上。
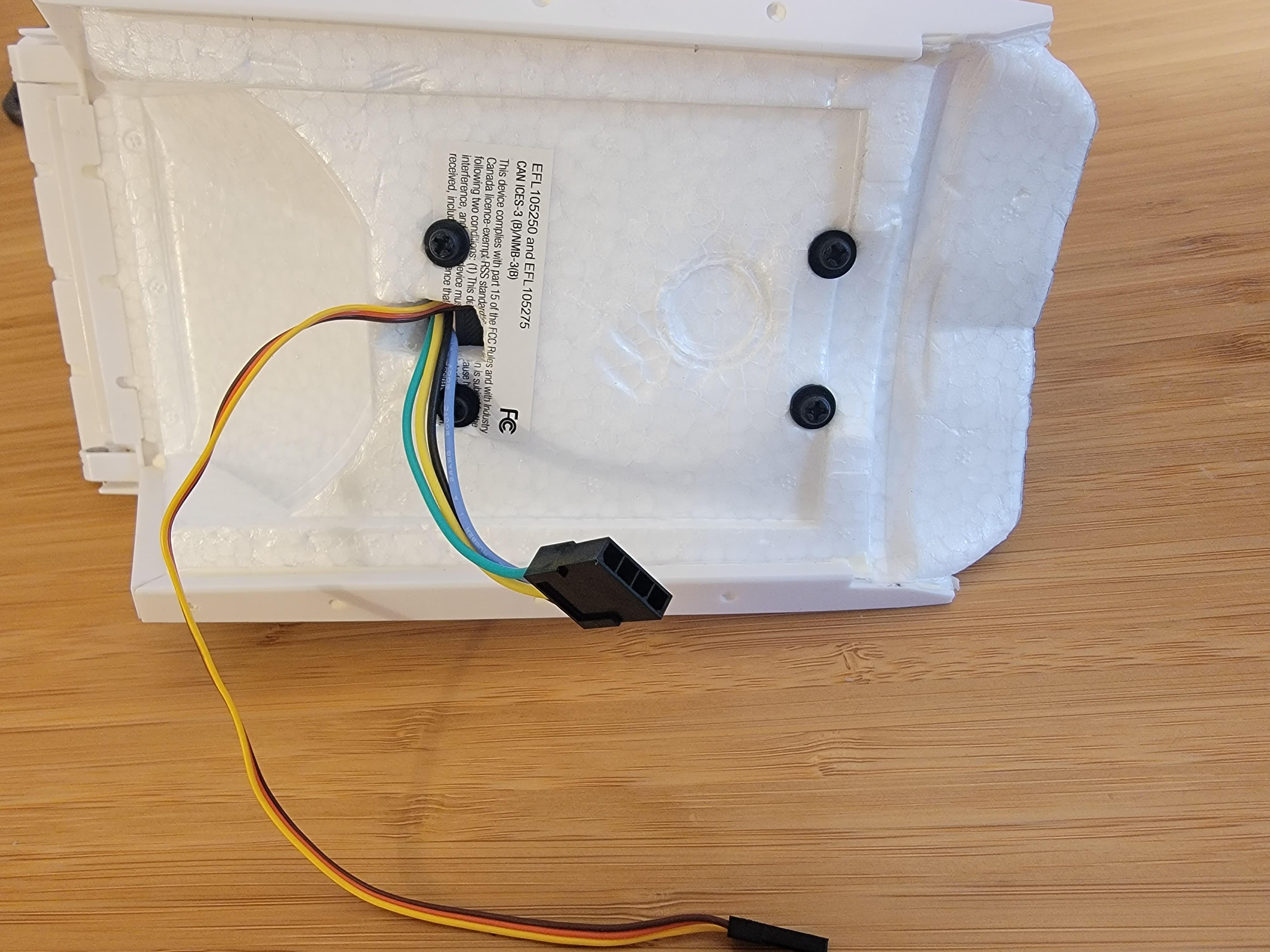
然后,将这四根引线绑在机翼底部,并将其引回 Pixhawk 4 Mini。
最初是用胶带粘住皮托管舱的盖子,以便在首飞后对设置进行测试并在需要时进行修改。首飞后,盖子用热熔胶固定到位。
飞行计算机安装
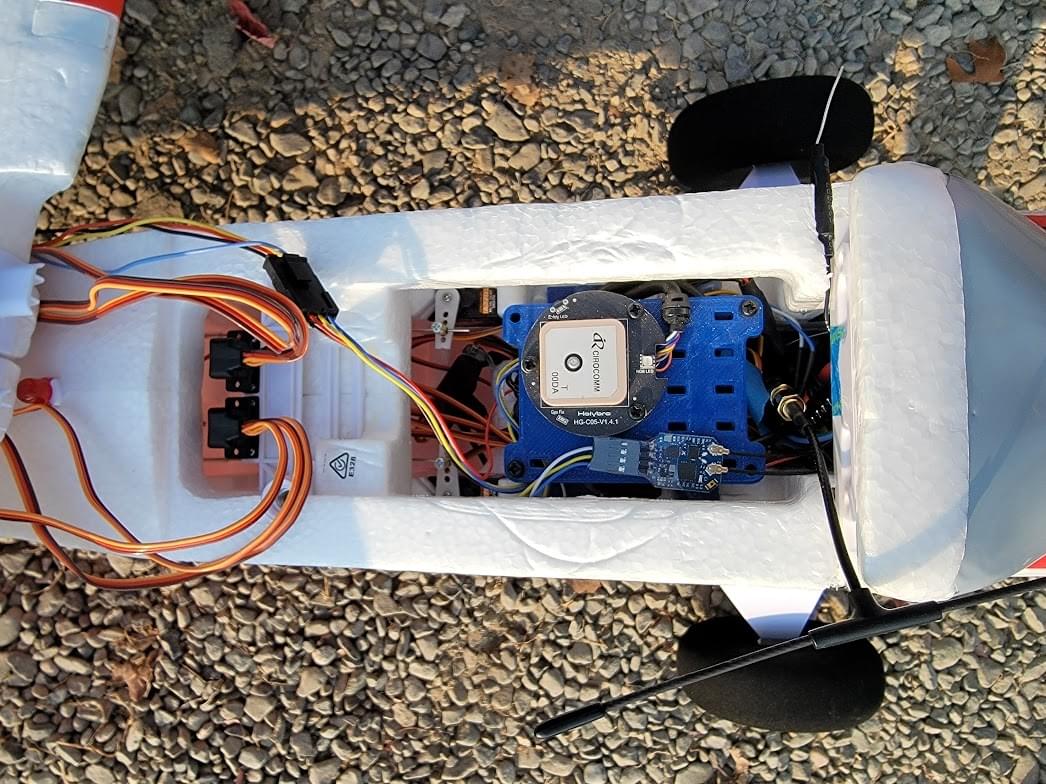
我们为 PX4 Mini 设计并 3D 打印了一个定制支架(见 3D 打印部件 所有部件)。该支架经过精心设计,利用了 TTE 机身内部泡沫模具的特点,连接牢固,对齐良好。支架由双层结构的两个部件组成,用 M3 螺纹支座栓在一起。底部支架承载 Pixhawk 并与机身相连,顶部支架承载 GPS 和 ExpressLRS RX。
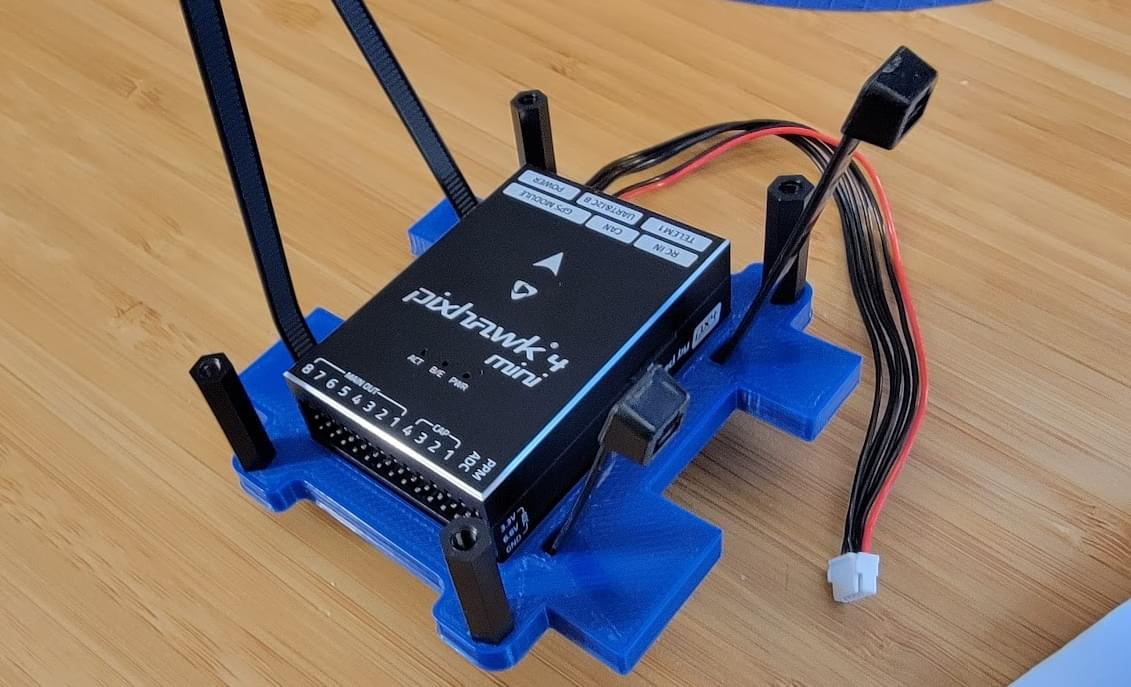
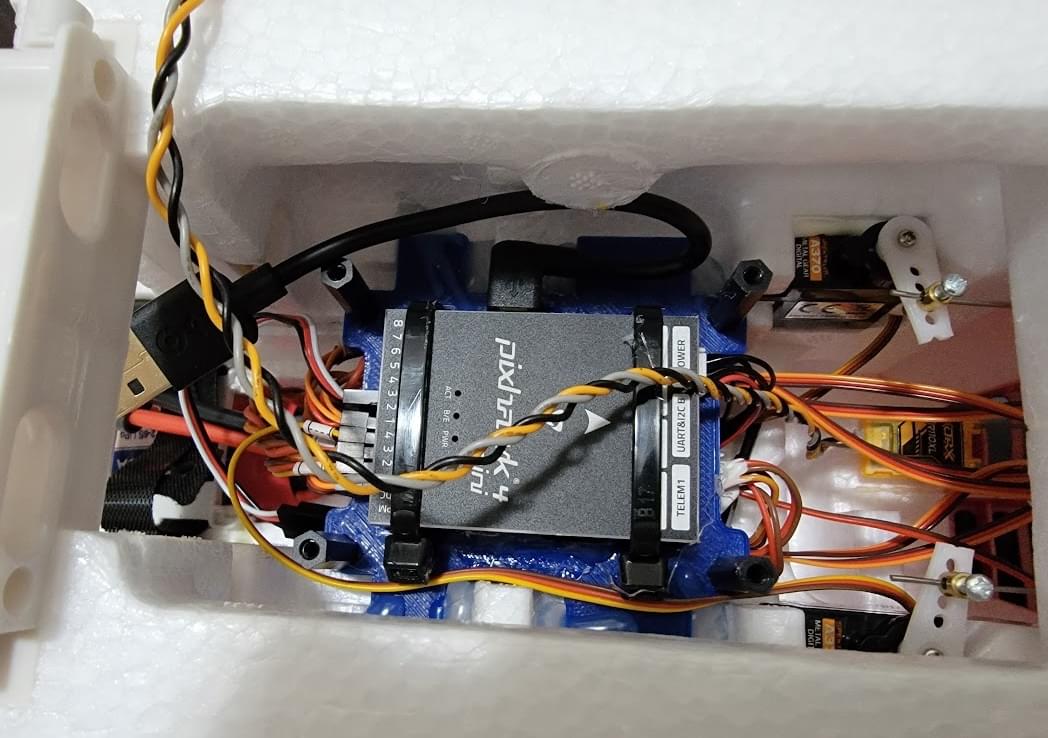
首先,将 Pixhawk 4 Mini 放入下支架。再用热胶将 fcu 与支架牢固地连接起来,并用两个拉链提供额外的安全性。安装上支架的支座,并牢牢拧紧螺栓。安装好下支架后,就无法再接触到这些螺钉,因此要注意确保它们拧得足够紧,这样就不会反弹。
电气
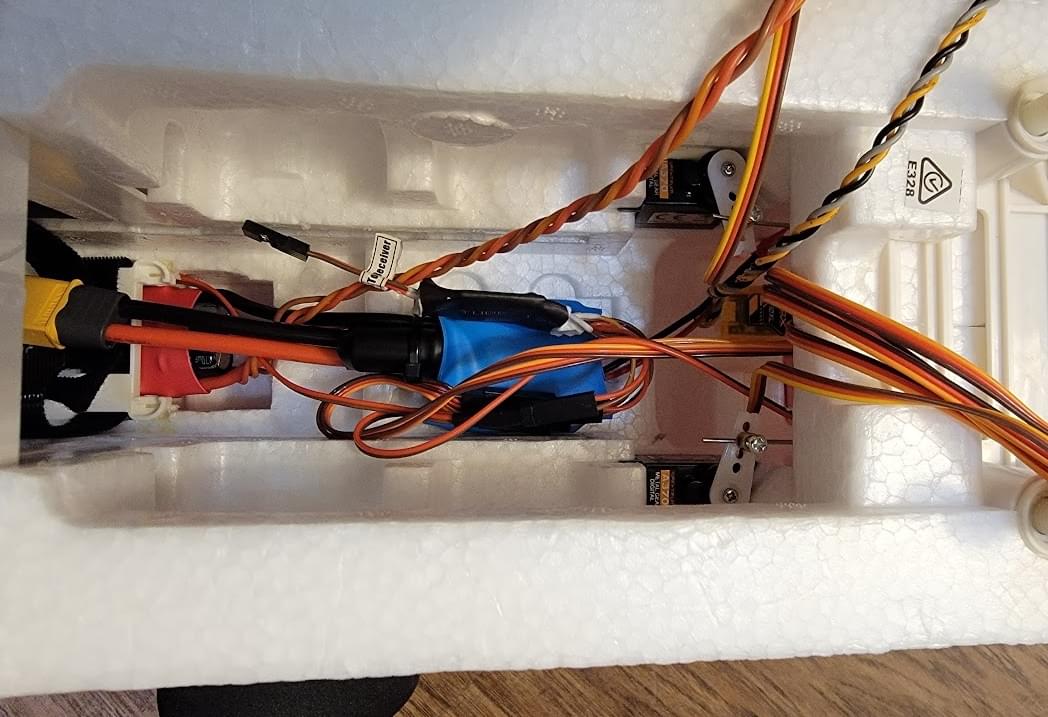
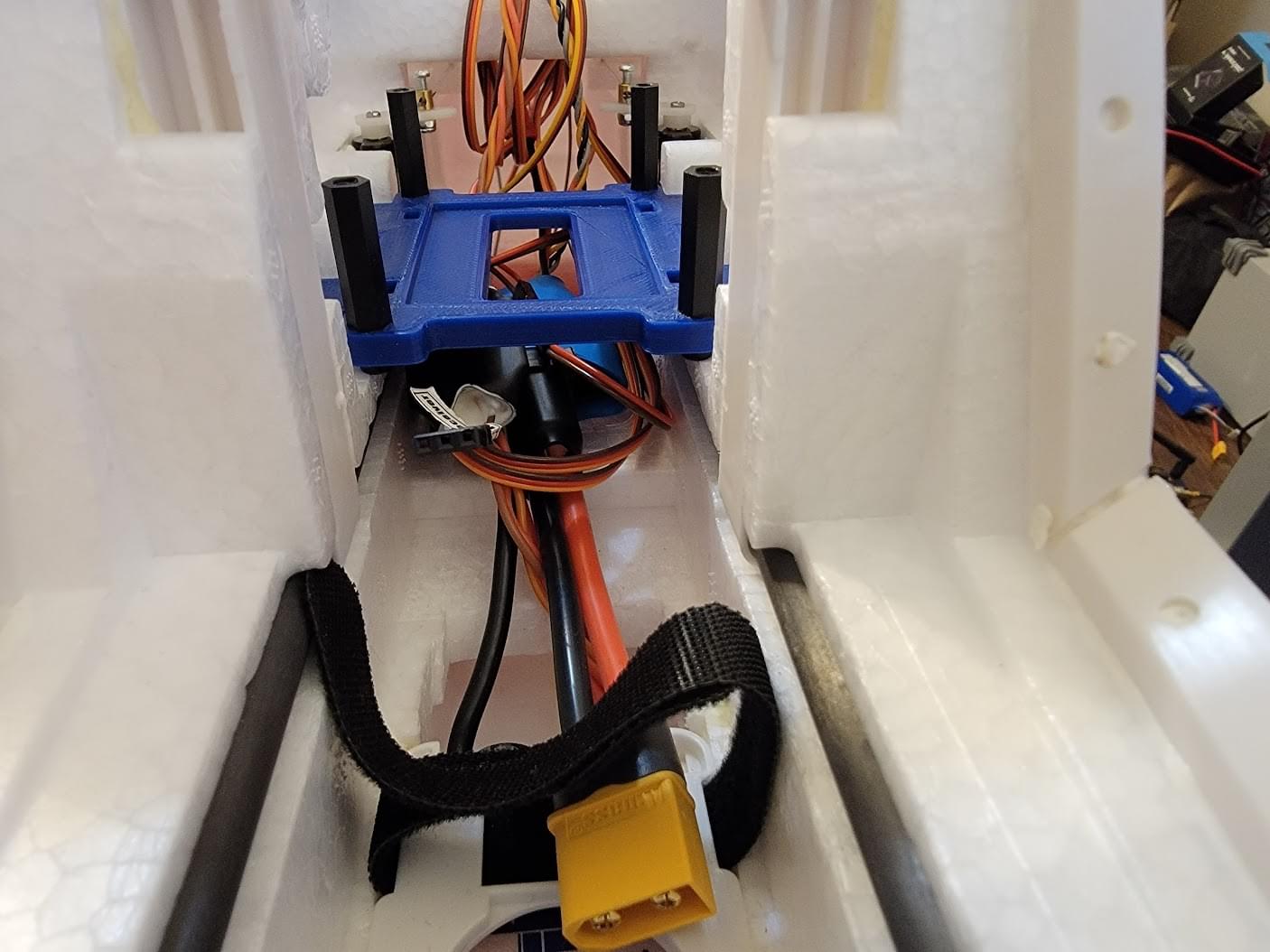
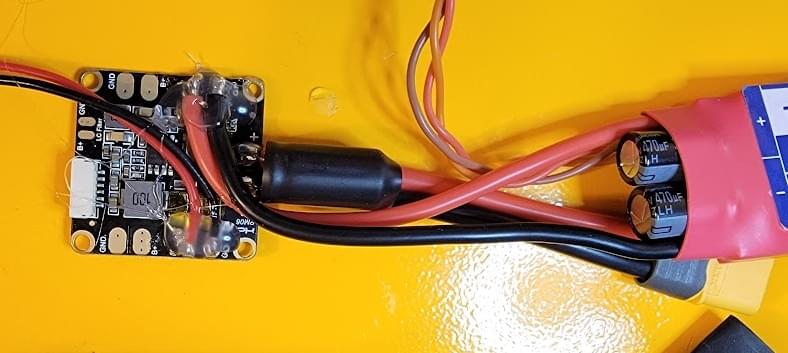
电源
Holybro 电源模块与电调连接在一起。此外,还断开了一条备用的 16AWG 电源线,并将其端接至 XT30。这条备用电源线将用于为 Caddx Vista FPV 装置供电,但也可以连接到分流器,为更多外围设备供电。舵机和照明的电源将由电调中的 BEC 电源提供。
TTE 在电池选择方面非常灵活。我同时使用 3.6Ah 4S Turnigy 电池组和升级能源 4s2p 锂电池组。虽然 3.6Ah 锂电池价格便宜,但升级能源锂离子电池组的飞行时间几乎是它的两倍(24 分钟对 12 分钟)。

伺服系统
舵机按照副翼、升降舵、方向舵、油门、襟翼和 FPV 平移的顺序连接到飞行计算机。还需要为照明系统安装一个额外的电源插头,但它不携带舵机信号,因此可以放在任何备用通道上。
喷嘴配置 屏幕如下所示。
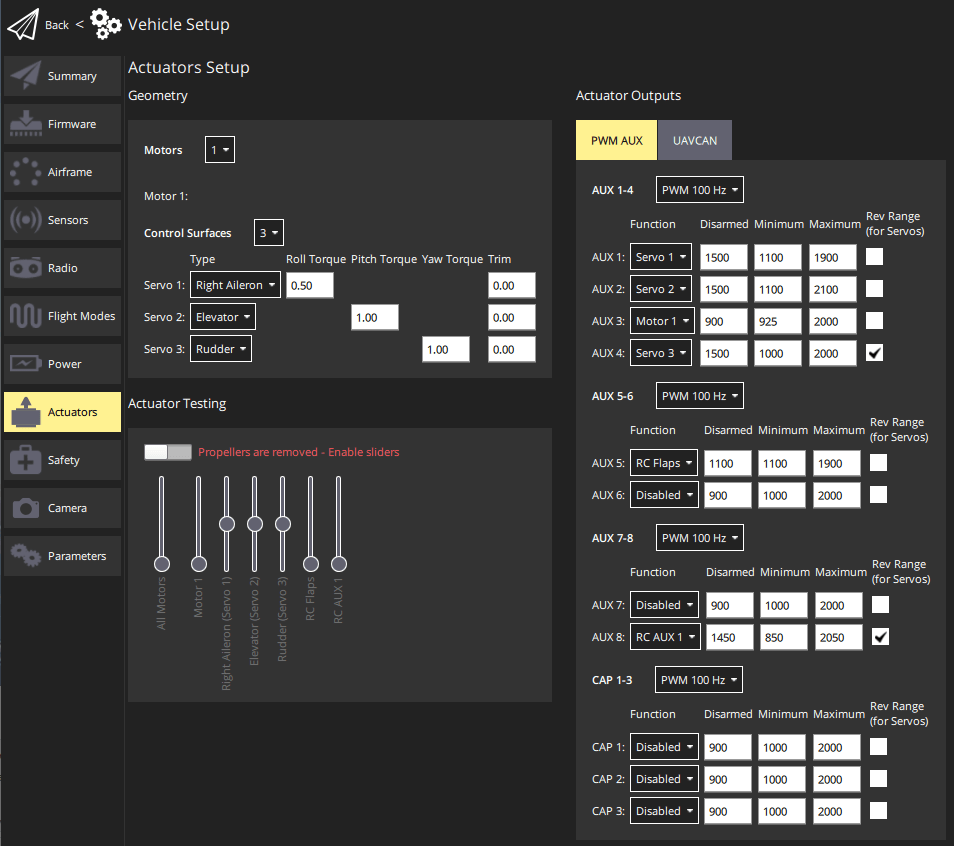
伺服端点是通过使用伺服测试仪确定伺服 PWM 脉冲宽度来获得的,以达到每个表面在每个方向上的最大行程。
配置 & 调试
访问 Pixhawk 4 Mini 需要拆下上支架。虽然这并不难,但这是简化现场调试的一个考虑因素。使用直角 USB 微型短延长线可轻松连接 Pixhawk 4 Mini 的 USB 接口。该电缆的 USB-A 端悬挂在电池舱内。同样,还制作了一个 JST PH 至标准间距接头适配器,也放在电池舱内,方便使用。
外围设备
遥控接收器
为连接 ExpressLRS RX (遥控接收器) 连接到 Pixhawk 4 Mini。
由于 Pixhawk 4 Mini 的 uarts 数量有限,因此将 RX 连接到了没有 TX 引脚的 RC 输入。这意味着 RX 只能向 FCU 发送控制数据,而不能从 FCU 向 RX 发送遥测数据。使用热缩管固定电缆的杜邦连接器,使其无法从 ExpressLRS RX 的针座上脱落。
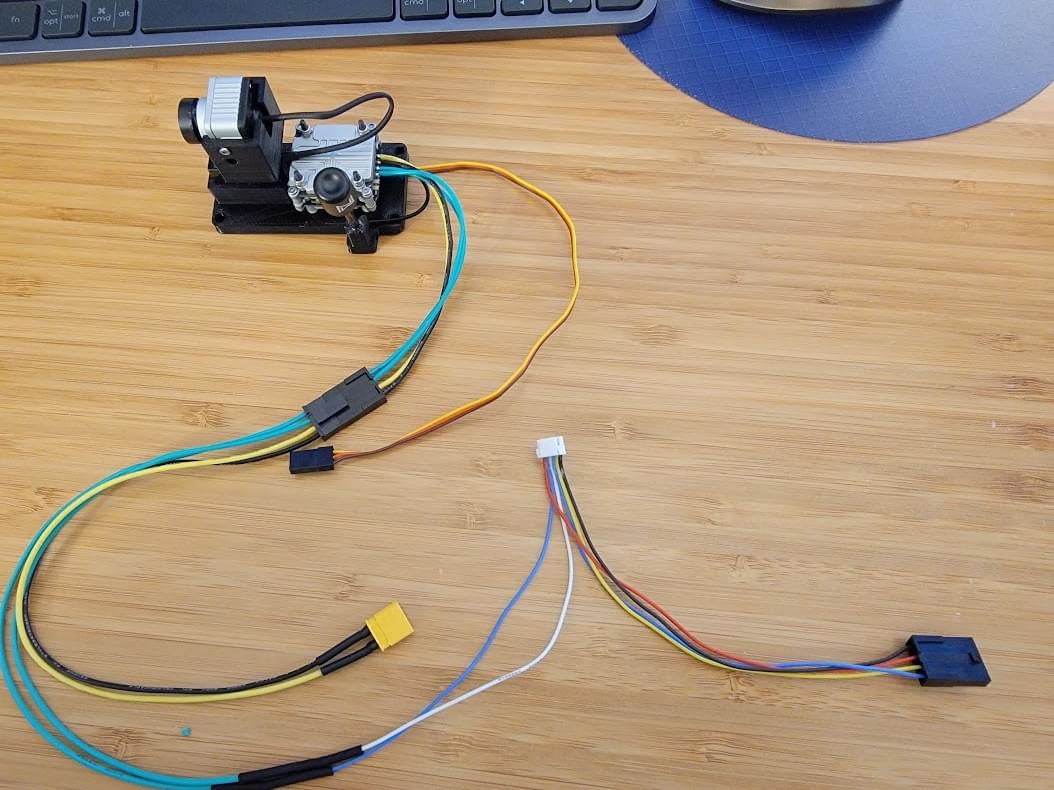
FPV 吊舱和空速电缆
我们还制作了另一条定制电缆,用于将 Caddx Vista FPV 发射器连接到 FCU UART(来自 UART/I2C B 在 Vista 附近加装了一个 Molex 微型配件,这样就可以轻松断开连接,而无需接触 Pixhawk。在 Vista 附近增加了一个 Molex 微型接头,这样就可以轻松断开连接,而无需接触 Pixhawk。顾名思义 UART/I2C B 端口同时提供 UART 和 I2C 接口。该端口与定制电缆分开,一侧为 I2C 空速传感器提供电源和数据,另一侧为 Caddx Vista 提供电源和 UART TX/RX。从 UART/I2C B 端口,5V、接地和 I2C SCL/SDA 被连接到 I2C 空速传感器,而串行 RX 和 TX 被连接到 Caddx Vista(接地由 Vista 的独立电池电源/接地引线提供)。
msp_osd 该模块用于将遥测数据流传输到 Caddx Vista,在启用自定义 OSD 功能后,可在大疆目镜上看到 Caddx Vista。
SIK 遥测无线电
SIK 遥测无线电的塑料外壳被拆除,以减轻重量和缩小模块体积。使用热缩管对裸板进行电绝缘,并将无线电安装在飞行计算机上下支架之间。
打造成果和性能
总的来说,这次建造是成功的。
即使由于安装了 Pixhawk 4 Mini 而增加了重量,飞机仍能保持良好的平衡,并有足够的动力保持其原有的 STOL 特性。PX4 可以轻松实现飞机稳定,并可通过以下方式对速率环进行微调 固定翼自动调整.调整结果见 参数文件链接如下.
在测试中,我发现在不使用襟翼的情况下,起飞高度可短至 10 英尺(3 米)。我在着陆时使用全副襟翼,以减缓机身的滑动。


性能
- 失速速度(无襟翼):指示速度 14MPH
- 巡航速度: 35-65MPH
- 起飞翻滚(襟翼全开):10 英尺
- 续航时间使用 5.2Ah 4s2p 锂离子电池 ~24 分钟,使用 3.6Ah 4S 锂聚合物电池 ~12 分钟
视频
飞行日志
参数文件
该参数文件包含此构建的自定义 PX4 参数配置,包括无线电设置、调整参数和传感器配置。参数文件可通过 QGC 加载,使用说明如下 参数> 工具 (QGC 用户指南)。