仿真场景Gazebo载具
本主题列出/显示 PX4 支持的载具 仿真场景Gazebo 模拟,以及 生产 运行这些命令所需的命令(这些命令通过终端在 PX4-自动驾驶仪 目录)。
模型作为子模块包含在 PX4 中,可从 仿真场景Gazebo模型库.
支持的飞行器类型包括:多旋翼机、VTOL、飞机。
警告
参见 仿真场景Gazebo老爷车 适用于与旧版 仿真场景Gazebo"经典"模拟.请注意,两个版本的模拟器不能互换载具模型:本页面上的载具仅适用于(新版)模拟器。 仿真场景Gazebo.
多旋翼飞行器
X500 四旋翼飞行器
吁
生产 px4_sitl gz_x500X500 四旋翼飞行器,带目视测距功能
吁
生产 px4_sitl gz_x500_vision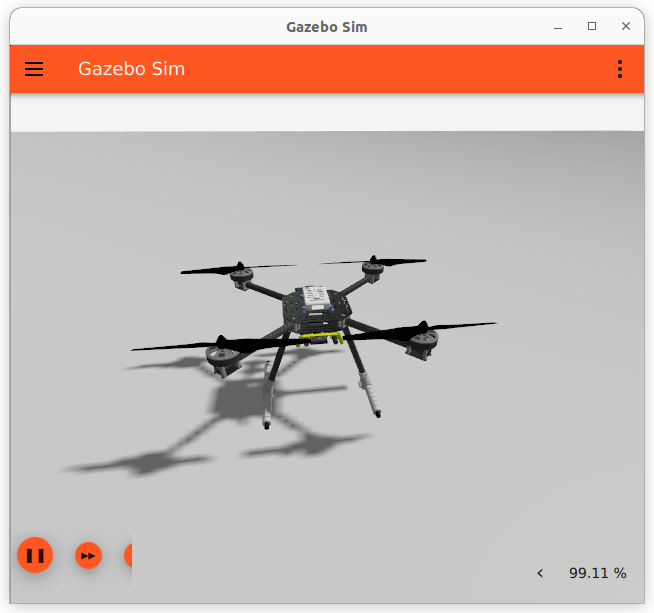
带深度摄像头的 X500 四旋翼飞行器
这些型号以 OAK-D 为蓝本,安装了深度摄像头。
前向深度摄像头
吁
生产 px4_sitl gz_x500_depth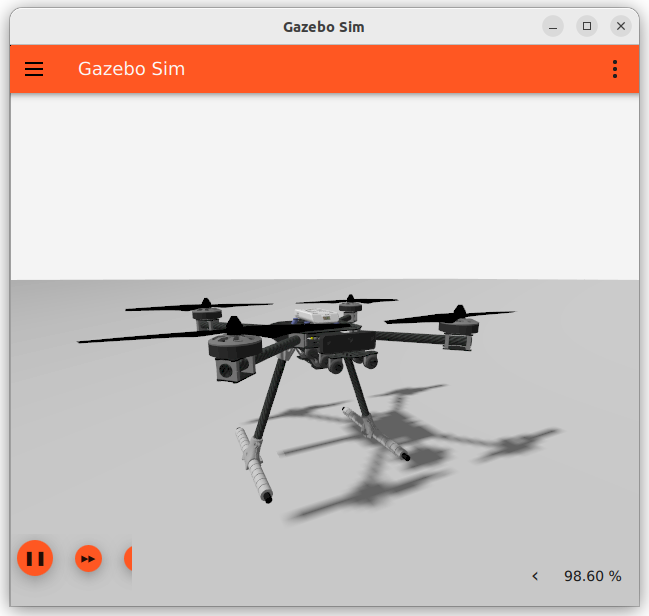
带单目摄像头的 X500 四旋翼飞行器
该模型附有一个简单的单目摄像头传感器(模型本身没有可视化的物理摄像头)。
吁
生产 px4_sitl gz_x500_mono_cam信息
在 QGroundControl 中,摄像机还不能用于视频流或图像捕捉。 PX4-Autopilot#22563 可用于跟踪全面启用这些用例所需的额外工作。
飞机/固定翼
标准平面
吁
生产 px4_sitl gz_rc_cessna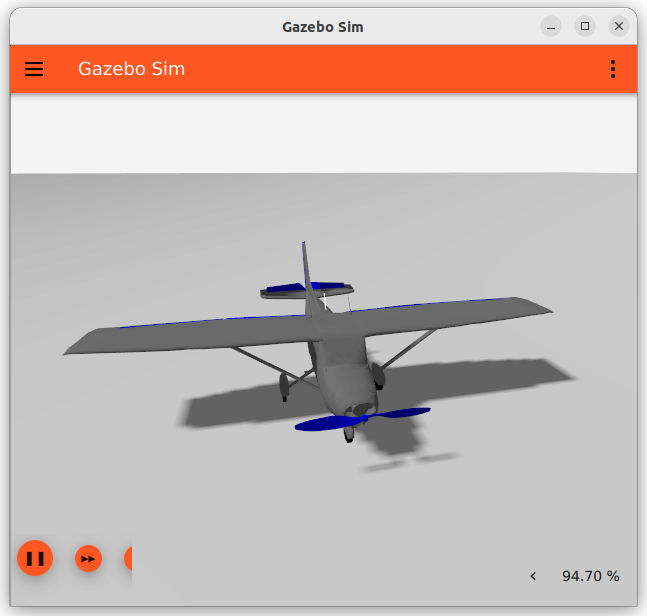
高级平面
吁
生产 px4_sitl gz_advanced_plane
信息
高级飞机与普通飞机的区别在于这两种机型使用的升力物理原理:
- 您可以配置 高级提升阻力 模型所使用的插件,使其与特定载具更匹配。 高级提升拖曳工具.
- 有关先进平面升力计算的更多详情,请参阅 PX4-SITL_gazebo-classic/src/liftdrag_plugin/index.md
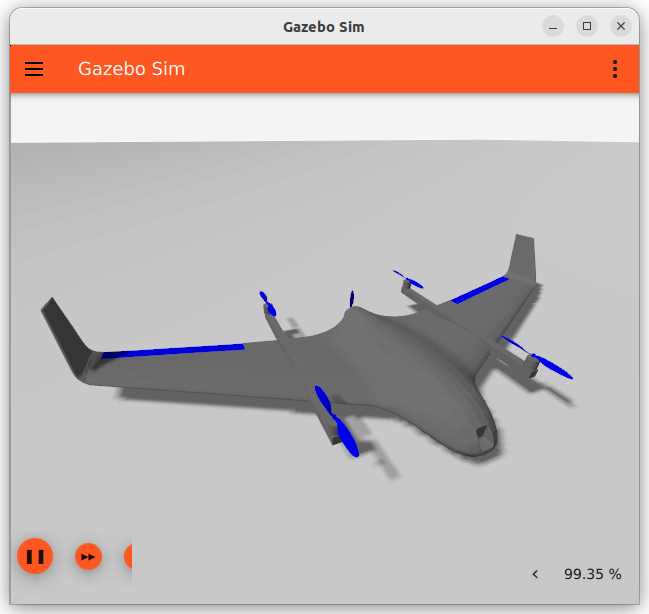
VTOL
标准 VTOL
吁
生产 px4_sitl gz_standard_vtol