FrSky 遥测技术
FrSky 遥测技术允许您访问载具的 遥测/状态 兼容遥控发射机的信息。
可用 这里列出了遥测其中包括:飞行模式、电池电量、遥控信号强度、速度、高度等。有些发射器还能提供声音和振动反馈,这对低电量和其他故障安全警告特别有用。
PX4 同时支持 S.Port (新)和 D(旧)FrSky 遥测端口。
硬件设置
FrSky 遥测技术要求
- 一个 兼容 FrSky 的遥控发射器 如 FrSky Taranis X9D Plus。
- 一个 具有遥测功能的 FrSky 接收机 如 XSR 和 X8R。
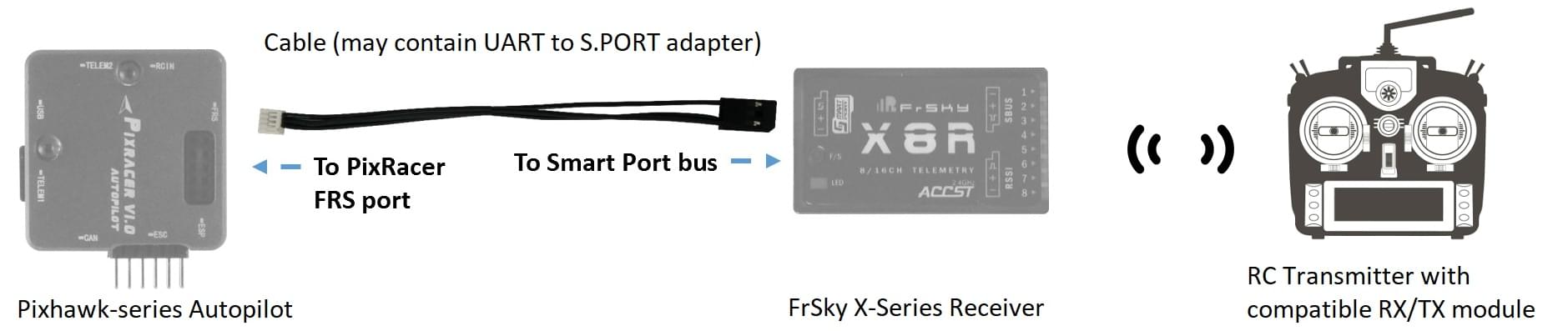
- 用于连接 FrSky 接收机智能端口(SPort)和飞行控制器 UART 的电缆。
第一 为 RC 频道连接接收器例如,连接接收器和飞行控制器上的 S.Bus 端口。
然后分别将接收器上的 SPort 连接到飞行控制器上的任意空闲 UART,设置 FrSky 遥测功能,然后 配置 PX4 以在 UART 上运行 FrSky 遥测技术.
具体做法略有不同,取决于 SPort 接收机是否有用于非反相输出的引脚,以及/或者 Pixhawk 的版本。
Pixhawk FMUv4(及更早版本)
对于 Pixhawk FMUv4 及更早版本,UART 端口和接收器遥测端口通常是不兼容的(除以下情况外 Pixracer).
一般来说,SPort 接收机有一个 颠 S.Port 信号,您必须使用转换器电缆将 S.Port 分成未反相的 TX 和 RX,以便连接到 Pixhawk UART。下面是一个示例。
如果使用的 S.Port 接收机有一个针脚用于 非逆变输出 您只需连接一个 UART'TX 引脚即可。
那么 配置 PX4.
Pixhawk FMUv5/STM32F7 及更高版本
对于 Pixhawk FMUv5 及更高版本,PX4 可直接读取反相(或非反相)S.Port 信号 - 无需特殊电缆。
信息
更普遍的情况是,采用 STM32F7 或更高版本的自动驾驶仪也会出现这种情况(例如,STM32F8 或更高版本)。 杜兰朵 它配有 STM32H7,可以直接读取反相或非反相 S.Port 信号)。
只需将 UART'TX 引脚之一连接到 SPort 反相或非反相引脚(PX4 会自动检测并处理任一类型)。然后 配置 PX4.
PX4 配置
配置串行端口 FrSky 将使用 tel_frsky_config.无需设置端口的波特率,因为波特率由驱动程序配置。
信息
您可以使用任何免费的 UART,但通常 电话 2 用于 FrSky 遥测(除 Pixracer预配置为使用 FrSky 默认端口)。
无需进一步配置;FrSky 遥测技术会在连接后自动启动,并检测 D 或 S 模式。
兼容遥控发射机
您需要一个可以接收遥测数据流的遥控发射器(与 FrSky 接收机绑定)。
流行的替代品包括
- FrSky Taranis X9D Plus(推荐使用)
- FrSky Taranis X9D
- FrSky Taranis X9E
- FrSky Taranis Q X7
- Turnigy 9XR Pro
上述发射机无需进一步配置即可显示遥测数据。下文将介绍如何自定义遥测显示(例如,创建更好的用户界面/用户体验)。
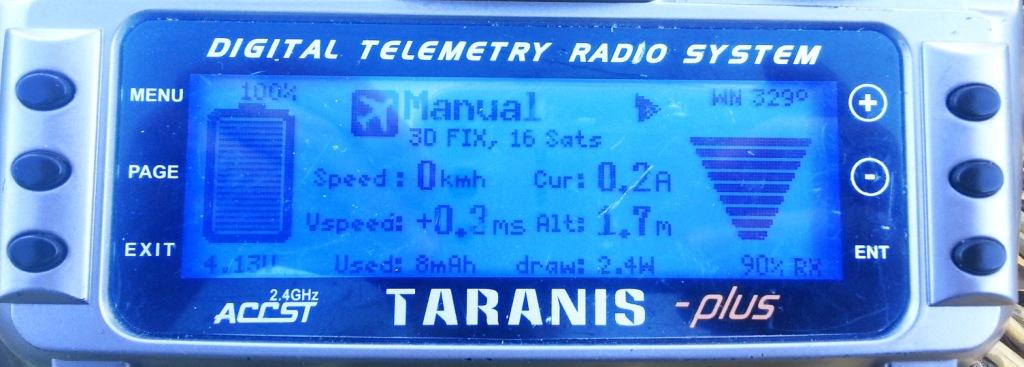
Taranis - LuaPilot 设置
运行 OpenTX 2.1.6 或更新版本的兼容 Taranis 接收机(如 X9D Plus)可使用 LuaPilot 脚本修改显示的遥测数据(如下截图所示)。
安装脚本的说明可在此处找到: LuaPilot Taranis 遥测脚本 > Taranis 设置 OpenTX 2.1.6 或更新版本
如果您打开 LuaPil.lua 您可以使用文本编辑器编辑配置脚本。建议的修改包括
本地 BattLevelmAh = -1- 使用载具的电池电量计算本地 SayFlightMode = 0- PX4 飞行模式没有 WAV 文件
遥测信息
FrySky 遥测技术可以从 PX4 传输大多数更有用的状态信息。S 端口和 D 端口接收器传输不同的信息集,如下文所述。
S 端口
S 端口接收器从 PX4 发送以下信息(从 这里):
- AccX、AccY、AccZ: 加速度计数值。
- Alt: 基于气压计的海拔高度,相对于家庭所在地。
- Curr: 实际电流消耗(安培)。
- 燃料 剩余电池百分比,如果
电池容量变量集和变量smartport_fuel_percent = ON否则将消耗 mAh。 - GAlt: GPS 高度,海平面为零。
- 全球定位系统: GPS 坐标
- GSpd: 当前水平地面速度,由 GPS 计算得出。
- Hdg: 航向(度数 - 北纬为 0°)。
- VFAS: 电池实际电压值(电压 FrSky 安培传感器)。
- VSpd: 垂直速度(厘米/秒)。
- Tmp1: 飞行模式,以整数形式发送:18 - 手动,23 - 高度,22 - 位置,27 - 任务,26 - 保持,28 - 返回,19 - Acro,24 0 Offboard,20 - Stabilized,25 - Takeoff,29 - Land,30 - Follow Me。
- Tmp2: GPS 信息。最右边的数字是 GPS 定位类型(0 = 无,2 = 2D,3 = 3D)。其他数字为卫星数量。
信息
PX4 不支持以下 S 端口标准报文: ASpd, A4.
D 端口
D 端口接收器传输以下信息(从 这里):
- AccX、AccY、AccZ: 加速度计数值。
- Alt: 气压计基于海拔高度,初始水平为零。
- 胶片 电池平均电压值(电池电压除以电池数量)。
- Curr: 实际电流消耗(安培)。
- 燃料 如果设置了容量,则剩余电池百分比,否则为毫安时。
- 日期 通电后的时间。
- GAlt: GPS 高度,海平面为零。
- 全球定位系统: GPS 坐标
- GSpd: 当前速度,由 GPS 计算得出。
- Hdg: 航向(度数 - 北纬为 0°)。
- 转速 如果已上膛,则为节流阀值,否则为电池容量。请注意,在 Taranis 中,叶片编号必须设置为 12。
- Tmp1: 飞行模式(与 S 端口相同)。
- Tmp2: GPS 信息(与 S 端口相同)。
- VFAS: 电池实际电压值(电压 FrSky 安培传感器)。
- Vspd: 垂直速度(厘米/秒)。
FrSky 遥测接收器
Pixhawk/PX4 支持 D(旧)和 S(新)FrSky 遥测技术。下表所列为通过 D/S.PORT 支持遥测的所有 FrSky 接收机(理论上,所有这些接收机都应工作)。
TIP
请注意,推荐使用下面列出的 X 系列接收器(如 XSR、X8R)。R 和 G 系列尚未经过测试小组的测试/验证,但应该可以使用。
| 接收器 | 范围 | 综合产出 | 数字遥测输入 | 尺寸 | 重量 |
|---|---|---|---|---|---|
| D4R-II | 1.5 公里 | CPPM (8) | D. 港口 | 40x22.5x6 毫米 | 5.8g |
| D8R-XP | 1.5 公里 | CPPM (8) | D. 港口 | 55x25x14 毫米 | 12.4g |
| D8R-II Plus | 1.5 公里 | 没有 | D. 港口 | 55x25x14 毫米 | 12.4g |
| X4R | 1.5 公里 | CPPM (8) | 智能端口 | 40x22.5x6 毫米 | 5.8g |
| X4R-SB | 1.5 公里 | S.Bus (16) | 智能端口 | 40x22.5x6 毫米 | 5.8g |
| X6R / S6R | 1.5 公里 | S.Bus (16) | 智能端口 | 47.42×23.84×14.7 毫米 | 15.4g |
| X8R / S8R | 1.5 公里 | S.Bus (16) | 智能端口 | 46.25 x 26.6 x 14.2 毫米 | 16.6g |
| XSR / XSR-M | 1.5 公里 | S.Bus (16) / CPPM (8) | 智能端口 | 26x19.2x5mm | 3.8g |
| RX8R | 1.5 公里 | S.Bus (16) | 智能端口 | 46.25x26.6x14.2 毫米 | 12.1g |
| RX8R PRO | 1.5 公里 | S.Bus (16) | 智能端口 | 46.25x26.6x14.2 毫米 | 12.1g |
| R-XSR | 1.5 公里 | S.Bus (16) / CPPM (8) | 智能端口 | 16x11x5.4 毫米 | 1.5g |
| G-RX8 | 1.5 公里 | S.Bus (16) | 智能端口 + 集成变速器 | 55.26178 毫米 | 5.8g |
| R9 | 10 公里 | S.Bus (16) | 智能端口 | 43.3x26.8x13.9 毫米 | 15.8g |
| R9 超薄型 | 10 公里 | S.Bus (16) | 智能端口 | 43.3x26.8x13.9 毫米 | 15.8g |
信息
上表来源于 http://www.redsilico.com/frsky-receiver-chart 和 FrSky 产品文档.
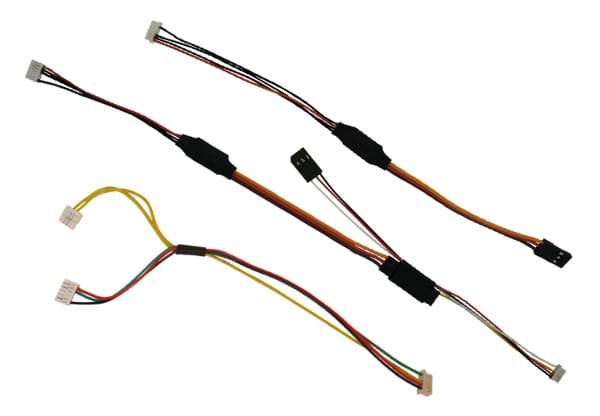
现成电缆
与 Pixhawk FMUv4 及更早版本(Pixracer 除外)配合使用的现成电缆可从以下网站获取:
工艺与理论.可提供与 DF-13 兼容的版本。 PicoBlade 连接器 (用于 FMUv2/3DR Pixhawk、FMUv2/HKPilot32)和 JST-GH 连接器 (适用于 FMUv3/Pixhawk 2 "The Cube" 和 FMUv4/PixRacer v1)。
DIY 电缆
您可以自己制作转接电缆。您需要与自动驾驶仪相匹配的连接器(如 JST-GH 连接器 适用于 FMUv3/Pixhawk 2 "The Cube" 和 FMUv4/PixRacer v1,与 DF-13 兼容 PicoBlade 连接器 适用于老式自动驾驶仪)。
Pixracer 包含在 S.PORT 和 UART 信号之间进行转换的电子元件,但对于其他电路板,您需要 UART 到 S.PORT 适配器。这些适配器可从以下网站获取:
有关不同电路板连接的更多信息如下。
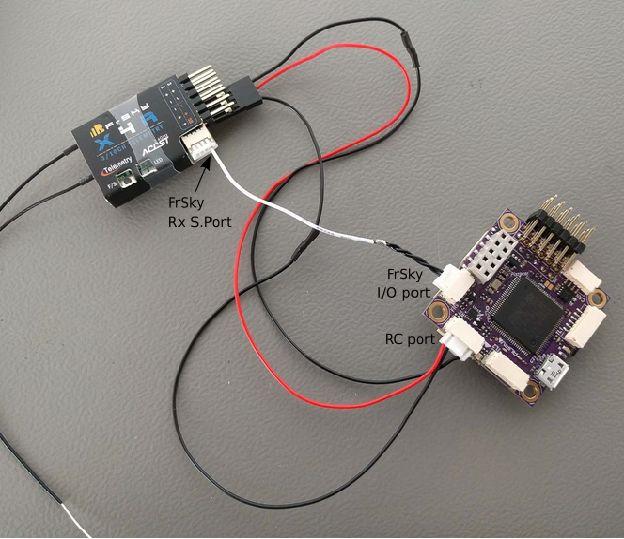
Pixracer 至 S 端口接收器
将 Pixracer FrSky 的 TX 和 RX 线(焊接在一起)连接至 X 系列接收机的 S.port 引脚。不需要连接 GND,因为在连接 S.Bus 时已经完成了连接(正常的 RC 连接)。
S 端口连接如下所示(使用提供的输入/输出连接器)。

Pixracer 至 D 端口接收器
TIP
现在,绝大多数用户都喜欢使用 S.PORT。
将 Pixracer FrSky TX 线路(FS 输出)连接到接收器的 RX 线路。将 Pixracer FrSky RX 线路(FS 输入)连接至接收器 TX 线路。不需要连接接地,因为在连接到 RC/SBus 时已经连接了接地(用于普通 RC)。
Pixhawk Pro
Pixhawk 3 Pro 可以连接到 TELEM4(无需额外的软件配置)。您需要通过一个 UART 至 S.PORT 适配器板或一个 现成电缆.
Pixhawk FMUv5 及更高版本
只需将 UART'TX 引脚之一连接到 SPort 反相或非反相引脚(PX4 会自动检测并处理任一类型)。
其他执行局
大多数其他电路板通过 TELEM2 UART 与 FrSky 遥测接收器连接。例如,这包括 Pixhawk 1, mRo Pixhawk, Pixhawk2.
您需要通过 UART 至 S.PORT 适配器板,或通过一个 现成电缆.
其他信息
有关更多信息,请参阅以下链接: