ARK RTK GPS
ARK RTK GPS 是一款开源 DroneCAN RTK GPS, u-blox F9P磁力计、气压计、IMU、蜂鸣器和安全开关模块。

购买地点
从以下网站订购该模块
- ARK 电子 (美国)
硬件规格
- 开源原理图和 BOM
- 传感器
- Ublox F9P GPS
- 多频段全球导航卫星系统接收器可在数秒内提供厘米级精度
- 同时接收 GPS、GLONASS、伽利略和北斗信号
- 多波段 RTK,收敛时间快,性能可靠
- 高更新率,适用于高动态应用
- 在小型节能模块中实现厘米级精度
- 博世 BMM150 磁强计
- 博世 BMP388 气压计
- Invensense ICM-42688-P 6 轴 IMU
- Ublox F9P GPS
- STM32F412CEU6 单片机
- 安全按钮
- 蜂鸣器
- 两个 Pixhawk 标准 CAN 连接器(4 引脚 JST GH)
- F9P "UART 2 "连接器
- 3 引脚 JST GH
- TX、RX、GND
- Pixhawk 标准调试连接器(6 针 JST SH)
- LED 指示灯
- 安全 LED
- GPS 定位
- RTK 状态
- RGB 系统状态
- 美国建造
- 电源要求
- 5V
- 平均 170 毫安
- 最大 180mA
硬件设置
布线
ARK RTK GPS 使用 Pixhawk 标准 4 针 JST GH 电缆连接到 CAN 总线。有关详细信息,请参阅 CAN 接线 指示。
安装
建议的安装方向是让电路板上的连接器朝向电路板。 车后.
传感器可以安装在车架上的任何位置,但在安装时需要指定其相对于载具重心的位置。 PX4 配置.
固件设置
ARK RTK GPS 运行 PX4 cannode 固件.因此,它支持通过 CAN 总线进行固件更新,并支持 动态节点分配.
ARK RTK GPS 板在出厂时已预装最新固件,但如果您想自己构建和闪存最新固件,请参考 cannode 固件构建说明.
固件目标: ark_can-rtk-gps_default 目标引导程序 ark_can-rtk-gps_canbootloader
飞行控制器设置
启用 DroneCAN
要使用 ARK RTK GPS,请将其连接至 Pixhawk CAN 总线,并通过设置参数 UAVCAN_ENABLE 至 2 进行动态节点分配(或 3 如果使用 DroneCAN 电子调速器).
步骤如下
- 在 QGroundControl 设置参数 UAVCAN_ENABLE 至
2或3并重新启动(见 查找/更新参数). - 将 ARK RTK GPS CAN 连接到 Pixhawk CAN。
启用后,模块将在启动时被检测到。GPS 数据应该以 10Hz 的频率到达。
PX4 配置
您需要设置必要的 DroneCAN 如果传感器不在载具的中心位置,还可定义参数和偏移量:
- 通过设置 GPS 的第 3 位,启用 GPS 偏航融合。 EKF2_GPS_CTRL 为 true。
- 启用 GPS 混合功能,通过设置 SENS_GPS_MASK 到 7(所有三个比特都经过校验)。
- 启用 UAVCAN_SUB_GPS, UAVCAN_SUB_MAG和 uavcan_sub_baro.
- 参数 EKF2_GPS_POS_X, EKF2_GPS_POS_Y 和 EKF2_GPS_POS_Z 可以设置为 ARK RTK GPS 与载具重心的偏移量。
- 设置 CANNODE_TERM 至
1如果这是 CAN 总线上的最后一个节点,则在 GPS 上显示。
设置移动基线和 GPS 方位
使用两个 ARK RTK GPS 模块设置移动基线和 GPS 航向的最简单方法是通过 CAN,但如果需要,也可以通过 UART 来减少 CAN 总线上的流量。
请注意,只有当UGV无人车处于 RTX 固定模式时,才会输出航向。在 RTK 浮动模式下不会输出航向。
通过 CAN 进行设置:
- 确保 ARK RTK GPS 模块通过 CAN 连接到 Pixhawk(一个模块可以连接到另一个模块的辅助 CAN 端口)。两个 ARK RTK GPS 必须连接到同一 CAN 总线上,才能发送修正。
- 选择一个 ARK RTK GPS 作为 UGV无人车 一个是 移动基地.
- 重新打开 QGroundControl,转到参数,然后选择
标准隐藏下拉菜单,然后选择组件 ##查看每个 ARK RTK GPS'CAN 节点参数信息
组件 ##除非在打开 QGroundControl 之前将 ARK RTK GPS 连接到 Pixhawk,否则将无法看到。 - 在 UGV无人车设置如下:
- GPS_UBX_MODE 至
3 - GPS_YAW_OFFSET 至
0如果你的 UGV无人车 在你的 移动基地,90如果 UGV无人车 是 移动基地,180如果 UGV无人车 落后 移动基地或270如果 UGV无人车 左边是 移动基地. - 子插管 至
1.
- GPS_UBX_MODE 至
- 在 移动基地设置如下:
- GPS_UBX_MODE 至
4. - 插图 至
1.
- GPS_UBX_MODE 至
通过 UART 设置:
- 确保 ARK RTK GPS 模块通过 CAN 连接到 Pixhawk。
- 确保 ARK RTK GPS 模块通过其 UART2 端口相互连接(UART2 引脚分配如下所示)。请注意,一个模块的 TX 需要与另一个模块的 RX 相连。
| 针脚 | 名称 |
|---|---|
| 1 | 德克萨斯州 |
| 2 | RX |
| 3 | 接地 |
- 在 UGV无人车设置如下:
- GPS_UBX_MODE 至
1 - GPS_YAW_OFFSET 至
0如果你的 UGV无人车 在你的 移动基地,90如果 UGV无人车 是 移动基地,180如果 UGV无人车 落后 移动基地或270如果 UGV无人车 左边是 移动基地.
- GPS_UBX_MODE 至
- 在 移动基地设置如下:
- GPS_UBX_MODE 至
2.
- GPS_UBX_MODE 至
LED 的含义
GPS 状态指示灯位于连接器右侧
- 绿色闪烁表示 GPS 定位
- 蓝色闪烁表示收到校正和 RTK 浮标
- 蓝色实线为 RTK 固定
CAN 状态指示灯位于连接器左上方
- 慢速闪烁的绿色表示正在等待 CAN 连接
- 绿色快速闪烁表示运行正常
- 慢速闪烁的绿色和蓝色表示 CAN 枚举
- 绿色、蓝色和红色缓慢闪烁表示正在进行固件更新
- 红色闪烁表示出错
- 如果您看到红色 LED 指示灯,说明出现了错误,应检查以下内容
- 确保飞行控制器已安装 SD 卡
- 确保 ARK RTK GPS 已
ark_can-rtk-gps_canbootloader在闪光前安装ark_can-rtk-gps_default - 删除 SD 卡根目录和 ufw 目录中的二进制文件,然后尝试重新构建和闪存
- 如果您看到红色 LED 指示灯,说明出现了错误,应检查以下内容
更新 Ublox F9P 模块
ARK RTK GPS 随 Ublox F9P 模块提供 1.13 或更新版本。不过,如果需要,您可以检查版本并更新固件。
步骤如下
- 从 u-blox.com 下载 u-center 并安装到电脑上(仅限 Windows)
- 打开 u-blox ZED-F9P 网站
- 向下滚动并单击"显示遗留文件"框
- 再次向下滚动到 "固件更新",下载所需的固件(至少需要 1.13 版)。
- 按住 ARK RTK GPS 上的安全开关,通过其中一个 CAN 端口将其连接到电源,并保持直到所有 3 个 LED 快速闪烁。
- 使用 Black Magic Probe 或 FTDI 等电缆,通过调试端口将 ARK RTK GPS 连接到电脑。
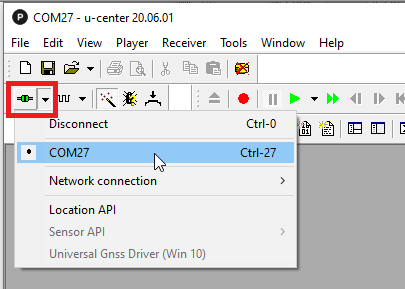
- 打开 u-center,选择 ARK RTK GPS 的 COM 端口并连接
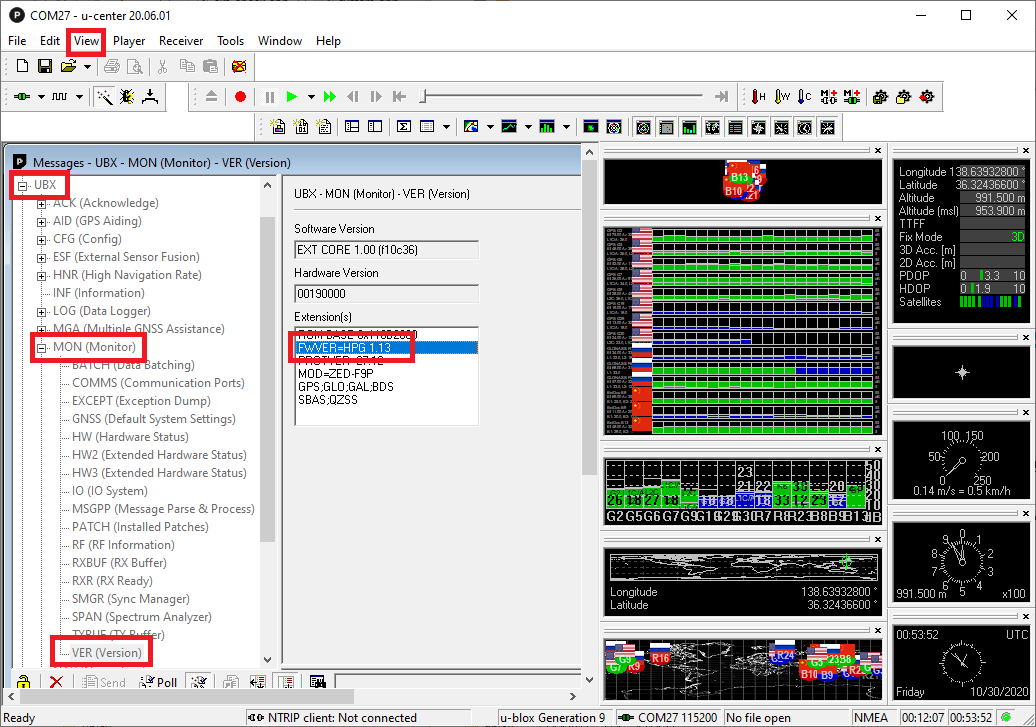
- 选择 "查看"、"信息查看"、"UBX"、"MON"、"VER",检查当前固件版本。
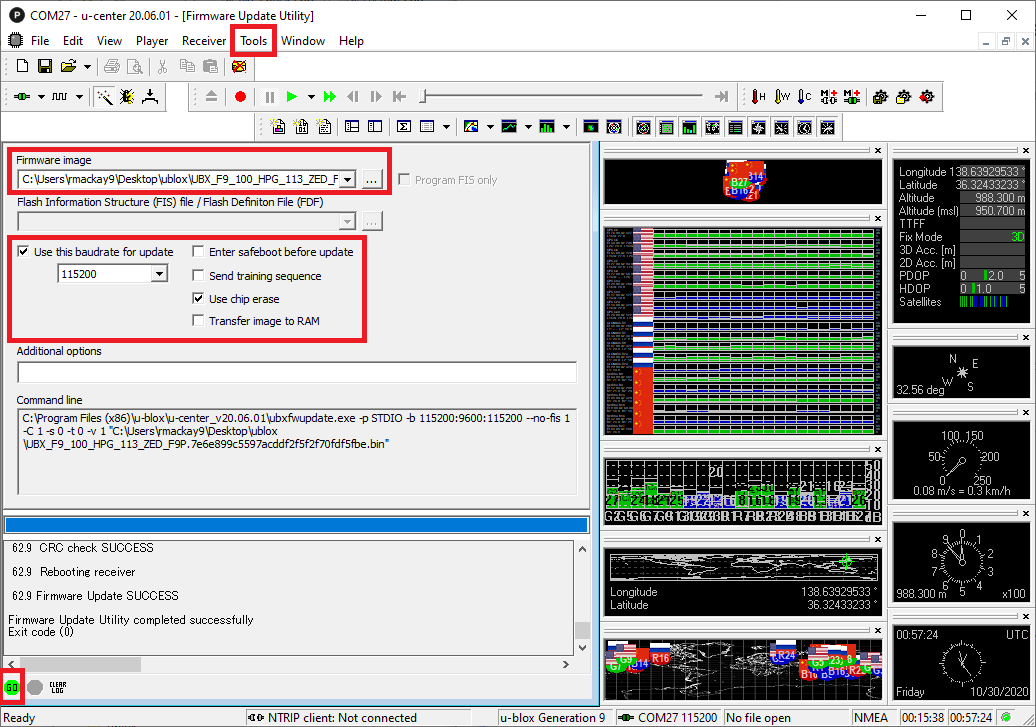
- 更新固件:
- 选择工具、固件更新
- 固件图像字段应为从 u-blox ZED-F9P 网站下载的 .bin 文件
- 选中 "使用此波特率进行更新"复选框,并从下拉框中选择 115200
- 确保其他复选框如下所示
- 按下左下方的绿色 GO 按钮
- 如果更新成功,应显示 "固件更新成功"。