TFSLOT - 文丘里效应空速传感器
TFSLOT 是一个开源的空速传感器,基于 文丘里效应 也有一个 IMU。
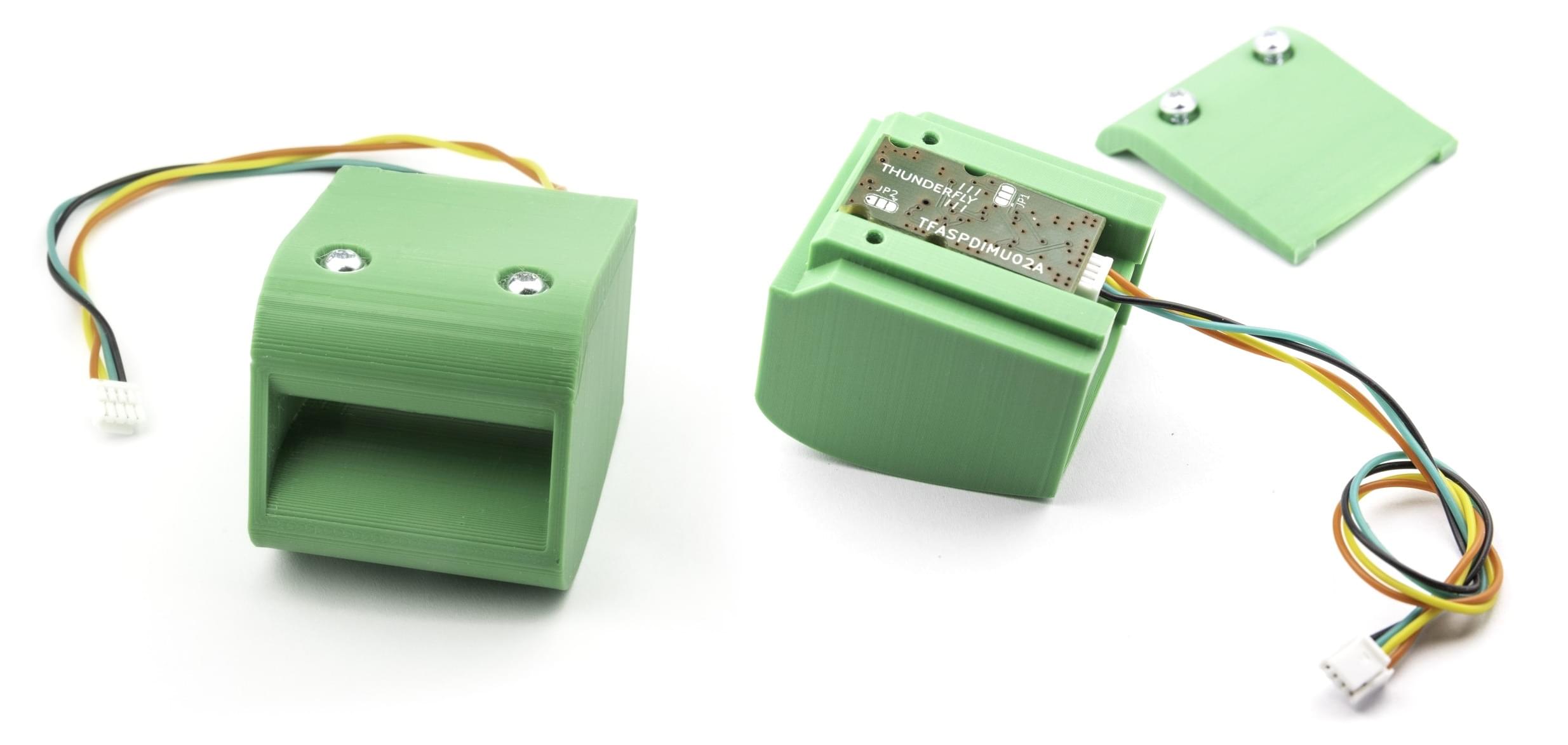
TFSLOT 是一种基于文丘里效应的空速传感器。在基本配置中,TFSLOT 配备了 TFASPDIMU02 传感器板,其中包含一个压差传感器 (Sensirion SDP3x 系列)和一个 9 轴运动跟踪传感器 (ICM-20948).IMU 单元可用作外部罗盘。
- 这种设计在小型和慢速飞行的无人机上使用时具有多种优势。
- 低气流速度(低于 10 米/秒)下的分辨率更高。
- 可通过更改配置文件来配置灵敏度。
- 不易堵塞(例如,着陆后被粘土堵塞)
- 防风雨(雨、雪等)
- 直接集成压差传感器,无需任何额外管道。减少传感器发生故障的几率。
- 可直接集成到无人机的构造中。设计完全开源。
- 集成外部 IMU 单元。
由于采用了印刷管,因此很容易改变测量曲线,从而改变某些速度范围内的灵敏度。其基本形式经过优化,使测量的压差与来自皮托管的压力一致。
 首次将 TFSLOT 纳入 TF-G2 自动步枪
首次将 TFSLOT 纳入 TF-G2 自动步枪
信息
完整的文档和源文件可在 GitHub.
购买地点
可以在以下网站购买 TFSLOT 廷迪商店 或发送电子邮件至 [email protected]
连接
TFASPDIMU02 配备了 I2C JST-GH 连接器,该连接器的引脚布局符合 dronecode 标准.因此,可使用 I2C 4 针 JST-GH 电缆将传感器直接连接到自动驾驶仪的 I2C 端口。
配置
因为有 IMU 集成电路 连接到传感器前,IMU IC 需要设置为桥接模式。然后运行空速传感器驱动程序。可以使用以下命令序列来完成。这些命令假定已连接到 I2C2 端口。
icm20948_i2c_passthrough 启动 -X -b 2 -a 0x68
sdp3x_airspeed 启动 -X -b 2该序列可以存储在 SD 卡的 /etc/config.txt 文件.有关 SD 卡配置的更多信息,请参阅 "SD 卡"。 单页.
由于将压差转换为空速的方法与皮托管不同,因此需要更改该曲线。参数 CAL_AIR_CMODEL 至 3(基于文丘里效应的空速传感器)
校准
校准有点困难,因为当前的固件版本不支持负值校准。由于使用的传感器对称测量两个气流方向且偏移量为零,因此无需在每次起飞前反复校准。但必须确保校准过程中没有气流。
最简单的校准方法是用胶带将其粘在传感器的压力入口之间。然后启动校准程序,并在出现提示时从背面吹气。如果压力至少达到 50 Pa,则校准成功。