PWM 伺服器和电调(电机控制器)
本节介绍如何连接基于 PWM 的无刷电机控制器和伺服系统并为其供电。
电调连接概述
每个 PWM 电子调速器 (ESC) 至少有以下接线:
- 电源 VBAT(通常为红色粗线)
- 电源接地(通常为黑色粗线)
还有伺服插头:
- PWM 信号(通常为白色或黄色)
- 接地(通常为黑色或棕色)
伺服插头 可以 也有一根 +5V 导线(通常为红色或橙色)。该导线的用途和连接方式取决于特定的电调和载具类型。
TIP
在某些情况下(见下文)不需要 +5V 线路。与其剪断 +5V 线路,不如轻轻抬起该引脚伺服连接器塑料外壳的锁片(例如使用刀片或小螺丝刀),然后将引脚拔出。用电气隔离胶带将其隔离并粘在伺服电缆上。这样您就可以在以后需要时轻松解开电线。
电源连接
始终将电源 VBAT 和接地端连接至电池,将伺服插头的 PWM 信号和接地端连接至电机。
TIP
有 无设置 无需连接信号地线!
与 +5V 导线(如果存在)的连接取决于电调/载具。
固定翼 / VTOL
在固定翼(或 VTOL)电调上,+5V 线路通常提供电池消除电路 (BEC) 的输出:
它可以连接到 Pixhawk 伺服轨,用于为襟翼、副翼等伺服器供电。
信息
从自动驾驶仪的航空电子设备电源为舵机或电调供电是不安全的。这就是为什么 Pixhawk 系列 飞行控制器不为伺服轨道供电(AUX 伺服轨道不供电,功率限制为 1A)。
根据经验,您应该只连接 只有一个 BEC 的输出 到 Pixhawk 伺服轨道。(虽然可以将多个 +5V 输出连接到轨道上,但这取决于电调型号)。
多旋翼飞行器
在多旋翼飞行器上,+5V 线路可能不存在或(如果存在)可能未连接。
- 多旋翼飞机通常不需要舵机,因此不需要为 Pixhawk 伺服轨道供电(电机通常由配电板单独供电)。
- 将电线连接到伺服导轨没有任何坏处(或好处)。
- DJI 电调一般都包括这条线,但没有连接。
光隔离式电调
在光隔离式电调上 不带 在使用 BEC 时,可能需要连接 +5V 线路并为其供电(以便为 ESC 微控制器供电)。在这种情况下,电线通常会连接到飞行控制器伺服轨,伺服轨必须由额外的 BEC 供电。
PX4 配置
PWM 电机和伺服电机使用 执行机构配置 QGroundControl 中的屏幕。
在分配了输出和基本校准之后,您可能希望进行 电调校准.
其他 PX4 PWM 配置参数可在此处找到: PWM 输出.
故障排除
Pixhawk 与所有 PWM 电子调速器 在市场上。如果某个电调无法正常工作,则可能是接线或配置不正确。
接地连接
检查电调伺服连接器的接地(黑线)是否连接到 Pixhawk(没有接地参考的布线设置是无效的)。
警告
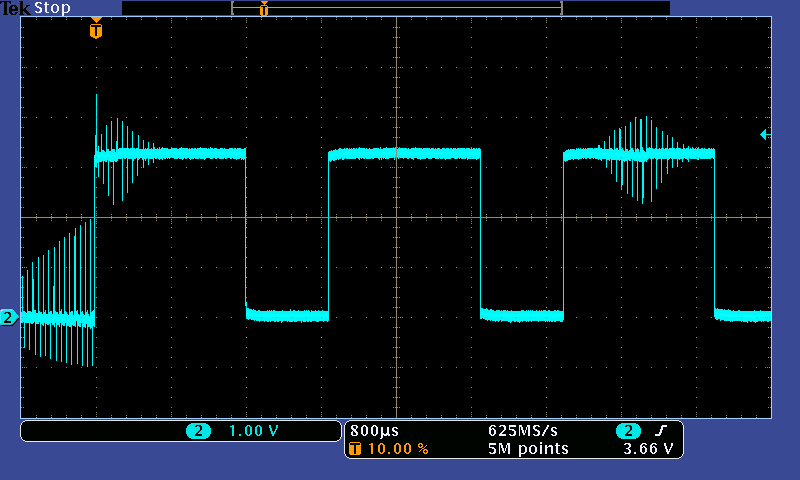
在没有接地的情况下飞行是不安全的。这是因为每一个正脉冲(电调信号)都需要有一个相邻的接地返回路径,以获得干净的信号形状。
下图显示了如果不连接 GND,信号会变得多么嘈杂。
电源连接/光电隔离电调
如果使用不提供 BEC / 电源输出的光电隔离式电调,请确保电调无需为光电隔离器的 +5V 线路供电。
有关其他电源连接注意事项,请参见本页第一部分的说明。
无效最小值
某些电调在开启前需要看到一个特殊的低值脉冲(以保护在开机时将油门杆置于中间位置的用户)。
PX4 会在解除载具防盗系统时发送一个脉冲,在解除防盗系统时使电子稳定性控制系统(ESC)静音,并确保电子稳定性控制系统(ESC)正确初始化。适当值的确定和设置是 执行器配置/测试 进程(在内部,这些参数设置了每输出参数 PWM_MAIN_DISn 和 PWM_AUX_DISn).
超时
如果某些电调在通电后几秒钟内未收到有效的低电平脉冲,则可能会超时(阻止电机启动)。
PX4 会在接通电源后立即发送空闲/解除脉冲,以阻止电调超时。适当值的确定和设置是 执行器配置/测试 进程(在内部,这些参数设置了每输出参数 PWM_MAIN_DISn 和 PWM_AUX_DISn).
有效脉冲形状、电压和更新率
信息
这应该不是问题,但为了完整起见,还是将其包括在内
Pixhawk 使用主动高电平脉冲,所有主要品牌(Futaba、Spektrum、FrSky)都使用这种脉冲。
PWM 接口没有正式标准化,不过,普通微控制器都使用 TTL 或 CMOS 电压电平。TTL 定义为低电压 0.8V 和高电压 2.0V,有些制造商使用 2.4V 以增加噪音余量。CMOS 逻辑定义为类似的电压电平。5V 电平为 从不 成功切换到 关于 州。
TIP
Futaba、FrSky 和 Spektrum 接收器输出 3.3V 或 3.0V 电压电平,因为它们远远高于 2.4V。Pixhawk 采用了这种通用的行业模式,在最近的电路板上输出 3.3V 电压电平。