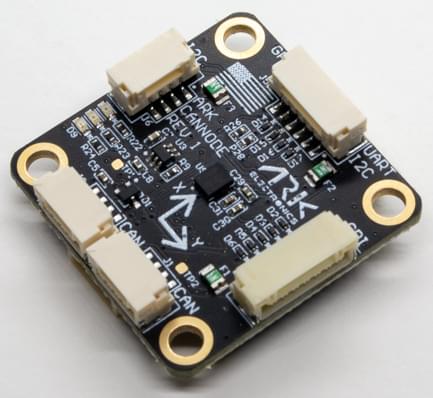
ARK CANnode
ARK CANnode 是一个开源的通用 DroneCAN 该节点包括一个 6 自由度 IMU。其主要用途是在 CAN 总线上使用非 CAN 传感器(I2C、SPI、UART)。它还具有 PWM 输出,可扩展载具控制输出的数量和物理距离。
购买地点
从以下网站订购该模块
- ARK 电子 (美国)
硬件规格
- 开源原理图和 BOM
- 传感器
- 博世 BMI088 6 轴 IMU 或 Invensense ICM-42688-P 6 轴 IMU
- stm32f412cgu6 mcu
- 1MB 闪存
- 两个 Pixhawk 标准 CAN 连接器
- 4 引脚 JST GH
- Pixhawk 标准 I2C 连接器
- 4 引脚 JST GH
- Pixhawk 标准 UART/I2C 连接器(基本 GPS 端口)
- 6 引脚 JST GH
- Pixhawk 标准 SPI 连接器
- 7 引脚 JST GH
- PWM 连接器
- 10 引脚 JST JST
- 8 PWM 输出
- 与 Pixhawk 4 PWM 连接器引脚输出匹配
- Pixhawk 标准调试连接器
- 6 引脚 JST SH
- 外形小巧
- 3 厘米 x 3 厘米 x 1.3 厘米
- LED 指示灯
- 美国建造
- 电源要求
- 5V
- 电流取决于连接的外设
硬件设置
布线
ARK CANnode 使用 Pixhawk 标准 4 针 JST GH 电缆连接到 CAN 总线。有关详细信息,请参阅 CAN 接线 指示。
固件设置
ARK CANnode 运行 PX4 DroneCAN 固件.因此,它支持通过 CAN 总线进行固件更新,并支持 动态节点分配.
ARK CANnode 板卡已预装最新固件,但如果您想自己构建和闪存最新固件,请参见 PX4 DroneCAN 固件 > 构建固件.
- 固件目标:
默认方舟代码 - 目标引导程序
ark_cannode_canbootloader
飞行控制器配置
启用 DroneCAN
要使用 ARK CANnode 板,请将其连接到 Pixhawk CAN 总线,并通过设置参数 UAVCAN_ENABLE 至 2 进行动态节点分配(或 3 如果使用 DroneCAN 电子调速器).
步骤如下
- 在 QGroundControl 设置参数 UAVCAN_ENABLE 至
2或3并重新启动(见 查找/更新参数). - 将 ARK CANnode CAN 连接到 Pixhawk CAN。
启用后,将在启动时检测模块。
PX4 中的 DroneCAN 配置详见 DroneCAN > 启用 DroneCAN.
启用传感器
您需要为连接到 ARK CANnode 的每个传感器启用相应的用户。
使用名为 UAVCAN_SUB_* 在参数参考中(如 uavcan_sub_aspd, uavcan_sub_baro 等等)。
方舟 CANNode 配置
在 ARK CANnode 上,您可能需要配置以下参数:
| 参数 | 说明 |
|---|---|
| CANNODE_TERM | CAN 内置总线终端。 |
LED 的含义
当 ARK CANnode 正在闪烁时,您会看到红色和蓝色 LED 灯;如果运行正常,则会看到纯蓝色 LED 灯。
如果 LED 显示为红色,则表示出错,应检查以下内容:
- 确保飞行控制器已安装 SD 卡。
- 确保 ARK CANnode 具有
ark_cannode_canbootloader在闪光前安装默认方舟代码. - 删除 SD 卡根目录和 ufw 目录中的二进制文件,并尝试重新构建和闪存。