Holybro S500 V2 + Pixhawk 4 构建
本主题提供了构建套件和配置 PX4 的完整说明,可使用 QGroundControl.
信息
Holybro 最初为该套件提供了一个 Holybro Pixhawk 4但在撰写本文时,它已升级为最新的 Pixhawk (6C)。由于套件组装几乎相同,而且随着飞行控制器的升级也可能保持相同,因此该构建日志仍具有相关性。
关键信息
- 框架 圣溪 S500
- 飞行控制器: Pixhawk 4
- 组装时间(约): 90 分钟(框架 45 分钟,自动驾驶仪安装/配置 45 分钟)

材料清单
圣溪 S500 V2 套件 包括几乎所有必需的组件:
- 最近的 Pixhawk 自动驾驶仪
- 本日志中使用的是 Pixhawk 4,但现在也包括了更新的版本。
- 电源管理 PM02(已组装)
- ARM 采用高强度塑料
- 电机 - 2216 KV880(V2 更新版)
- 螺旋桨 1045(V2 更新)
- Pixhawk4 GPS
- 带电调的完全组装电源管理板
- 433 MHz / 915 MHz Holybro 遥测无线电
- 电源和无线电电缆
- 电池带
- 尺寸:383385240毫米
- 轴距:480 毫米
信息
不包括锂电池。此外,我们还使用了 FrSky Taranis 控制器。
硬件
| 项目说明 | 数量 |
|---|---|
| 轴距480 毫米 | 1 |
| 武器 | 4 |
| 一套起落架 | 2 |
| M3*8 螺钉 | 18 |
| M2 5*6 螺钉 | 24 |
| 电池带 | 1 |
| 螺旋桨 1045(V2 更新) | 1 |

包装
| 项目 | 包装 |
|---|---|
| Pixhawk 4 | 1 |
| Pixhawk4 GPS 模块 | 1 |
| I2C 分离器电路板 | 2 |
| 6 至 6 针电缆(电源) | 3 |
| 4 至 4 针电缆(CAN) | 2 |
| 6 至 4 针电缆(数据) | 1 |
| 10 至 10 针电缆(PWM) | 2 |
| 8 至 8 针电缆(AUX) | 1 |
| 7 至 7 针电缆(SPI) | 1 |
| 6 至 6 针电缆(调试) | 1 |
| PPM/SBUS 输出电缆 | 1 |
| XSR 接收器电缆 | 1 |
| DSMX 接收机电缆 | 1 |
| SBUS 接收器电缆 | 1 |
| USB 电缆 | 1 |
| 'X'型折叠式基座支架 | 1 |
| 70mm & 140mm 碳纤维杆支座 | 2 |
| 6*3 2.54 毫米间距水平针 | 1 |
| 8*3 2.54 毫米间距水平针脚 | 2 |
| 泡沫套装 | 1 |
| Pixhawk4 快速入门指南 | 1 |
| Pixhawk4 引脚布局 | 1 |
| GPS 快速入门指南 | 1 |

电子产品
| 项目说明 | 数量 |
|---|---|
| Pixhawk 4 自动驾驶仪(不包括 PM06) | 1 |
| 电源管理 PM02(已组装) | 1 |
| 电机 - 2216 KV880(V2 更新版) | 4 |
| Pixhawk 4 GPS | 1 |
| 带电调的完全组装电源管理板 | 1 |
| 433MHz 遥测无线电/915MHz 遥测无线电 | 1 |

所需工具
装配时使用了以下工具:
- 1.5 毫米六角螺丝刀
- 2.0 毫米六角螺丝刀
- 2.5 毫米六角螺丝刀
- 3 毫米十字螺丝刀
- 剪线钳
- 精密镊子


装配
预计组装时间为 90 分钟,其中约 45 分钟用于框架组装,45 分钟用于在 QGroundControl 中安装和配置自动驾驶仪。
组装起落架。我们首先要将起落架组装到垂直杆上。如下图所示,拧下起落架螺钉并插入垂直杆。


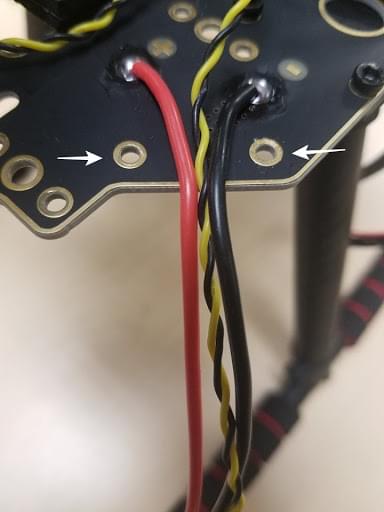
将电源管理板组装到起落架上。用垂直杆将起落架拧到完全组装好的电源管理板上。
电路板上有 4 个孔(见下面的箭头)。

用 M3X8 螺钉连接,共 8 个,每边 4 个。

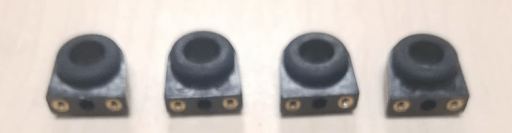
将机械臂组装到电源管理板上。将机械臂安装到电源管理板上。

使用 M2 5X6 螺钉,每个臂上共 2 个。从板的底部插入螺钉。

确保电调电缆穿过机臂中部。

组装 83 2.54 毫米间距水平引脚将 10 至 10 引脚电缆 (PWM) 连接至电源管理板。将 10 至 10 引脚电缆(PWM)连接至电源管理板上的 83 2.54 毫米间距水平针。

剪下一条 3M 胶带,贴在水平针的底部:

将水平引脚粘贴到电源管理板上:

将电机组装到臂上。为此,我们需要 16 个 M3X7 螺钉、4 个电机和 4 个臂。
将电机安装到每个臂上,将螺钉穿过臂的底部:


将 4 个电机安装到机械臂上后,抓起电缆(红、蓝、黑)并将其穿过机械臂螺纹。颜色编码的 3 根电缆将连接到电调。


将 GPS 安装到框架上。为此,我们需要 Pixhawk 4 GPS 和安装板。

使用 4 个螺钉将 GPS 杆安装到电路板背面:


用胶带将 GPS 粘在 GPS 杆的顶部:

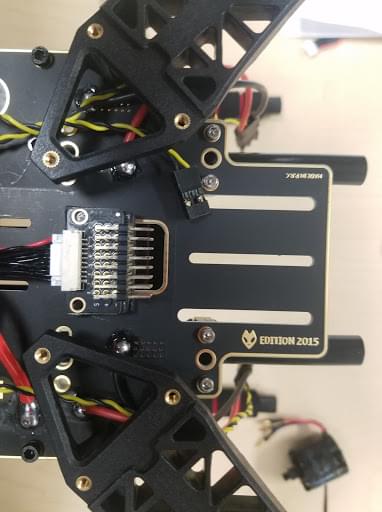
将 FrSky 粘贴到电路板上。用双面胶(3M)将 FrSky 粘贴到底板上。将 FrSky 固定到框架上:


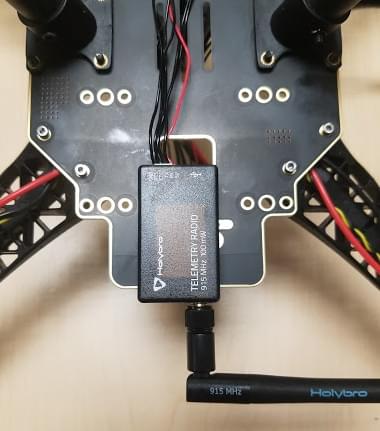
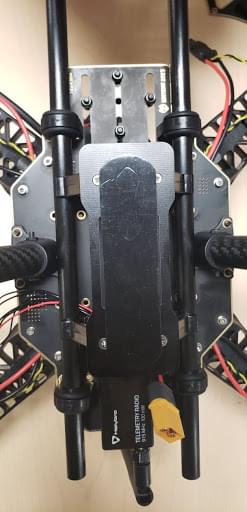
将遥测设备安装到框架上。下一步是使用 3M 胶带将 Holybro 遥测无线电固定到机架上。


该组件将收音机安装在车架内侧,面向载具前方。下图是收音机安装在车架底部的情况。
将 Pixhawk 4 安装到板上。使用双面胶将 Pixhawk 4 固定到中板上:



下一步是将带板的 Pixhawk 4 安装到框架上。为此,我们需要 M2 5X6 螺钉。将板对准框架,然后插入螺丝。在安装板之前,我们建议在电源模块上贴上胶带(这样可以贴紧)。

将电池支架安装到框架上。为此,我们需要 M2 5X6 螺钉和电池座:

将长杆插入小环:

将其安装到框架上,确保四边对齐,以便插入螺丝:
将小板安装到支腿上,并在四边拧上螺丝。

最后一步是安装模板:
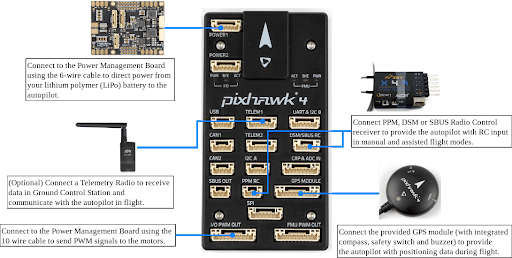
Pixhawk 4 接线。Pixhawk 4 有几种不同的接线和连接方式。下面是 Pixhawk 所需的每根电线的图片,以及连接后的外观。
如图 37 所示,将遥测和 GPS 模块插入飞行控制器;将遥控接收器、所有 4 个电调以及电源模块插入飞行控制器。
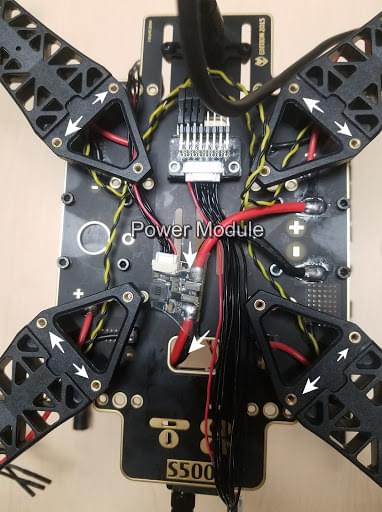
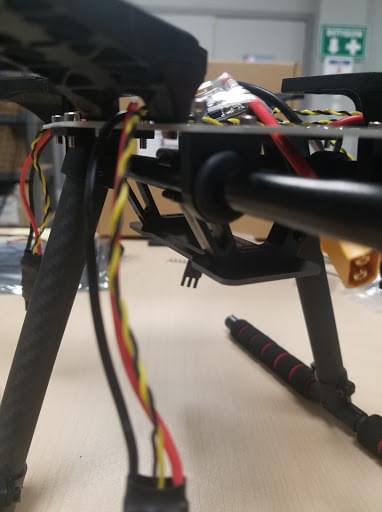
完全组装后的套件如下图所示:


PX4 配置
QGroundControl 用于安装 PX4 自动驾驶仪并为 QAV250 机架进行配置/调整。 下载并安装 QGroundControl 您的平台。
TIP
有关安装和配置 PX4 的完整说明,请参见 基本配置.
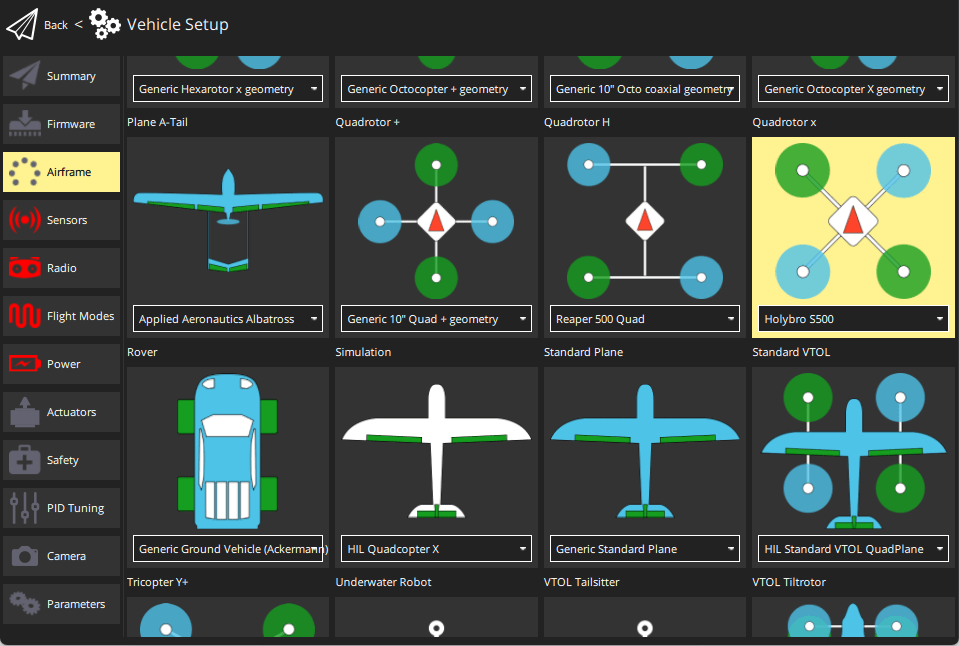
首先更新固件和机身:
然后设置执行机构的输出:
- 致动器
- 您应该不需要更新飞行器的几何形状(因为这是一个预配置机身)。
- 为输出端分配执行器功能,以匹配您的布线。
- 使用滑块测试配置。
然后执行必要的设置/校准:
理想情况下,你也应该这样做:
调音
机身选择套件 默认 机架的自动驾驶参数。这些参数足以满足飞行需要,但最好还是针对特定的机架结构调整参数。
有关如何操作的说明,请从 自动调整飞行稳定参数.
致谢
该构建日志由 Dronecode 测试飞行团队提供。