高级飞行控制器方向调整
这些指令可用于手动微调方向和水平仪,例如纠正传感器板的微小偏差或轻微的校准错误。
如果出现持续的漂移偏差(多旋翼飞行器中经常出现,但不仅限于多旋翼飞行器),那么使用这些微调偏移角参数进行微调,而不是使用遥控发射机的微调器,不失为一种好的策略。这样可以确保飞行器在完全自主飞行时保持微调。
信息
这些说明都是高级说明,不建议普通用户使用(一般情况下,广泛的调整就足够了)。
设置方向参数
SENS_BOARD_ROT 参数定义了飞行控制器板相对于飞行器框架的旋转,而微调偏移 (感应板 X 关闭, 感应板关闭, 感应板关闭)设置传感器相对于电路板本身的旋转角度。微调偏移量被添加到 SENS_BOARD_ROT 角度,以确定飞行控制器偏航、俯仰和滚转方向的总偏移角度。
首先为 飞行控制器定向 和 水平线校准 以设置 SENS_BOARD_ROT 参数。
然后可以设置其他参数,以便微调 IMU 传感器相对于电路板本身的方向。
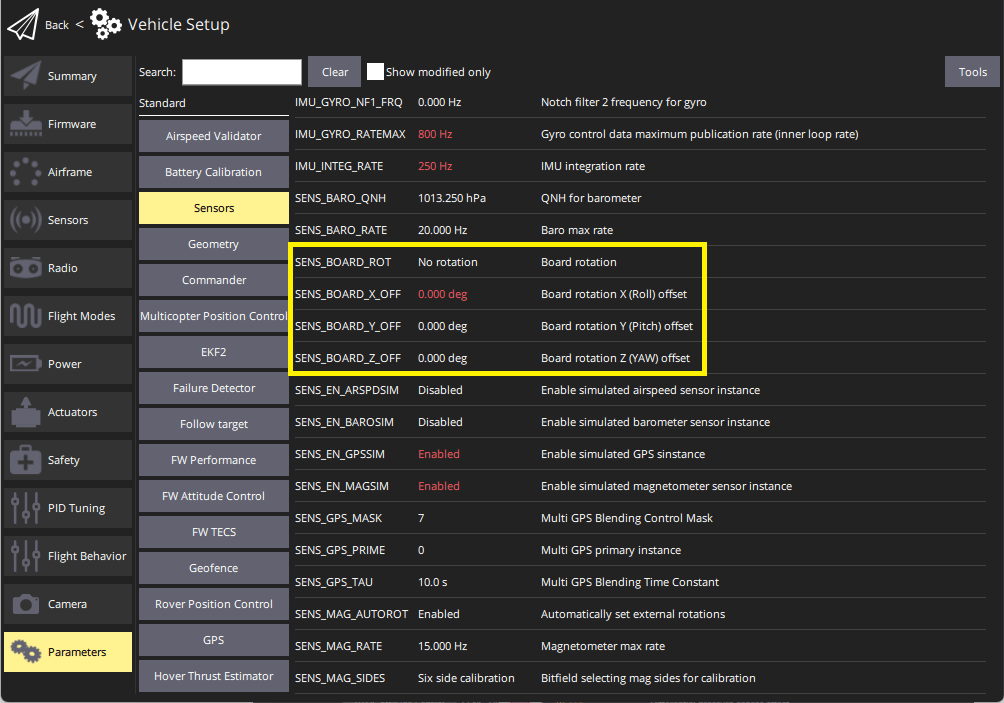
您可以在 QGroundControl 中找到这些参数,如下所示:
打开 QGroundControl 菜单: 设置> 参数> 传感器校准.
参数位于下图所示部分(也可以搜索):
参数摘要
- SENS_BOARD_ROT:FMU 板相对于车架的旋转。
- 感应板 X 关闭:绕 PX4FMU'X 轴或滚动轴的旋转角度,单位为度。正角按 CCW 方向增加,负角按 CW 方向增加。
- 感应板关闭:绕 PX4FMU'Y 轴或俯仰轴的旋转角度,单位为度。正角按 CCW 方向增加,负角按 CW 方向增加。
- 感应板关闭:绕 PX4FMU'Z 轴偏航轴的旋转角度,单位为度。正角按 CCW 方向增加,负角按 CW 方向增加。