全能 F4 SD
警告
该飞行控制器已 停产 目前已不再在市场上销售。
警告
PX4 不生产这种(或任何)自动驾驶仪。有关支持或合规问题,请联系制造商。
全能 F4 SD 是一款专为竞赛手设计的控制板。与典型的竞赛控制板相比,它具有一些附加功能,如 SD 卡和更快的 CPU。

这些是与 Pixracer:
- 更低的价格
- 更少的 IO 端口(但仍可连接 GPS 或流量传感器等设备)
- 外部 GPS 需要 I2C 总线上的外部上拉电阻器,请参见 I2C 下图
- 内存(192 KB 对 256 KB)和闪存(1 MB 对 2 MB)更少
- 电路板尺寸与 Pixracer但外形尺寸略小(因为连接器较少)。
- 集成 OSD(尚未在软件中实施)
TIP
您的竞赛仍可使用 PX4 的所有常规功能!
信息
该飞行控制器 支持的制造商.
主要功能
- 主片上系统: STM32F405RGT6
- 中央处理器168 MHz ARM Cortex M4,带单精度 FPU
- 内存:192 kb Sram
- 闪存: 1 MB
- 标准竞赛外形尺寸:36x36 毫米,标准孔型为 30.5 毫米
- MPU6000 加速/陀螺仪
- BMP280 Baro(并非所有电路板都安装了它)
- 微型存储卡(用于记录)
- Futaba S.BUS 和 S.BUS2 / Spektrum DSM2 和 DSMX / Graupner SUMD / PPM 输入 / Yuneec ST24
- OneShot PWM 输出(可配置)
- 内置电流传感器
- 内置 OSD 芯片(通过 SPI 接口连接 AB7456)
购买地点
不同供应商生产的电路板有一些差异(如带或不带气压计)。
TIP
PX4 与支持 Betaflight OMNIBUSF4SD 目标机的电路板兼容(如果 OMNIBUSF4SD 如果产品页面上有"......",则电路板应与 PX4 兼容)。
TIP
任何贴有 Omnibus F4 标签的衍生产品(如克隆产品)也可以使用。不过,这些电路板上的电源分配质量参差不齐。
这些电路板经过测试,已知可以正常工作:
信息
该电路板安装在 好盈 XRotor Micro 40A 4in1 电子调速器 无需焊接。该电调电路板还为总线电路板供电。
从何处购买?
- 好盈 XRotor F4 Flight Controller w/OSD (getfpv)
原装 Airbot Omnibus F4 SD
从何处购买?
配件包括
- ESP8266 WiFi 模块 用于 MAVLink 遥测。您需要连接这些引脚:GND、RX、TX、VCC 和 CH-PD(CH-PD 为 3.3V)。波特率为 921600。
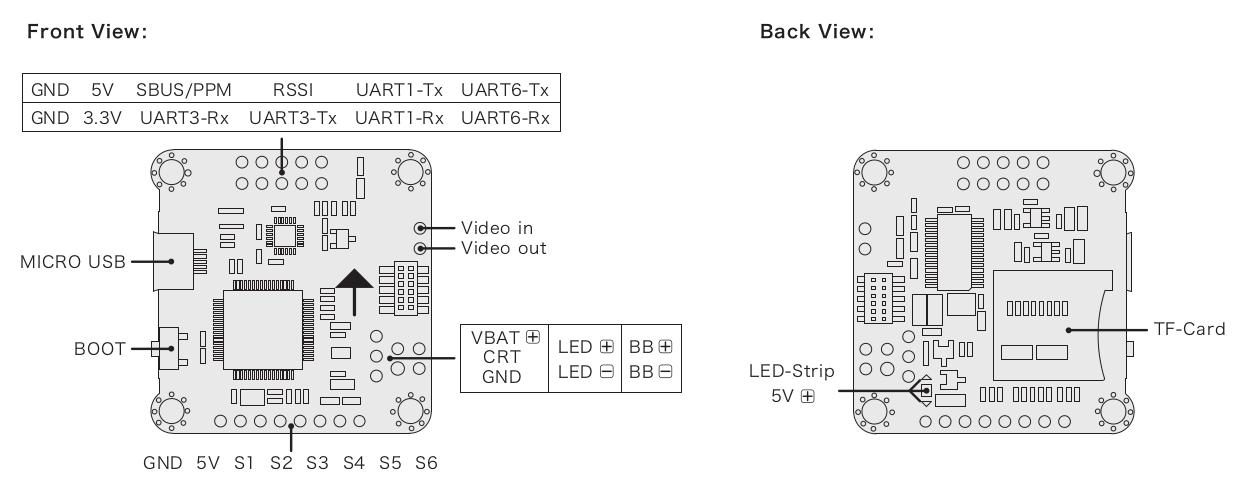
连接器
不同供应商的电路板(基于此设计)可能有明显不同的布局。各种版本的布局/丝网版图如下所示。
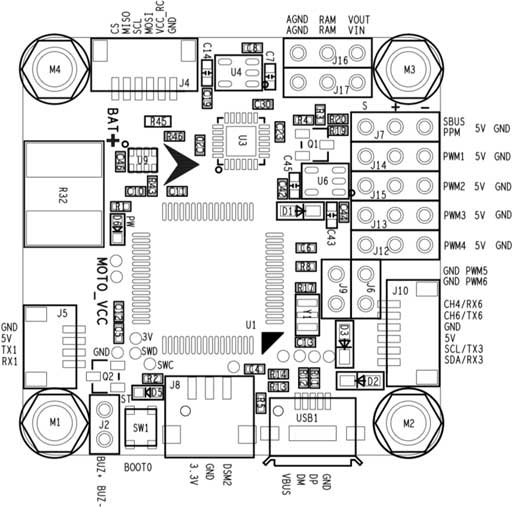
Airbot Omnibus F4 SD
以下是 Airbot Omnibus F4 SD (V1) 的丝网印刷品,显示了顶部和底部。
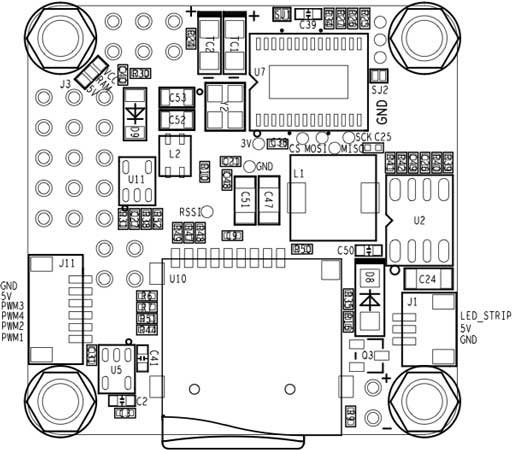
好盈 XRotor F4 飞行控制器
以下是好翼 XRotor 飞行控制器 F4 的丝网印刷品。
引脚
无线电遥控
RC 连接到以下端口之一:
- UART1
- SBUS/PPM 端口(通过反相器,内部连接至 UART1)
信息
有些 Omnibus F4 电路板上有一个跳线,将 MCU SBUS 和 PPM 两者或其中之一连接到一个针座上。使用前请将跳线或焊桥设置到相应的 MCU 引脚上。
UART
UART6:GPS 端口
TX:MCU 引脚 PC6
RX:MCU 引脚 PC7
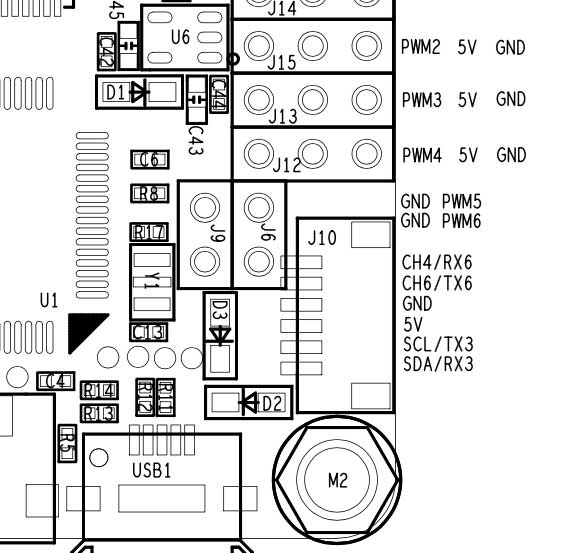
Airbot Omnibus F4 SD 引脚位于端口 J10(TX6/RX6)上:
UART4
- TX:MCU 引脚 PA0
- RX:MCU 引脚 PA1
- 57600 波特
- 可将其配置为
电话 2港口。 - Airbot Omnibus F4 SD 引脚输出:
- TX:RSSI 引脚
- RX:PWM 输出 5
I2C
有一个 I2C 端口可通过
- SCL: MCU 引脚 PB10(可能标为 TX3)
- SDA:MCU 引脚 PB11(可能标为 RX3)
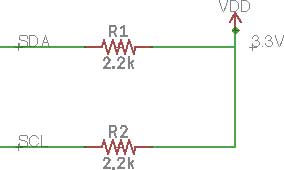
信息
两个信号(时钟和数据)都需要外部上拉。例如,您可以使用 2.2k 上拉来连接外部磁盘。
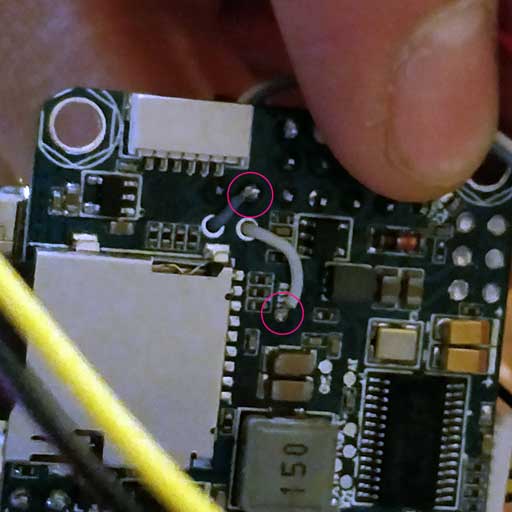
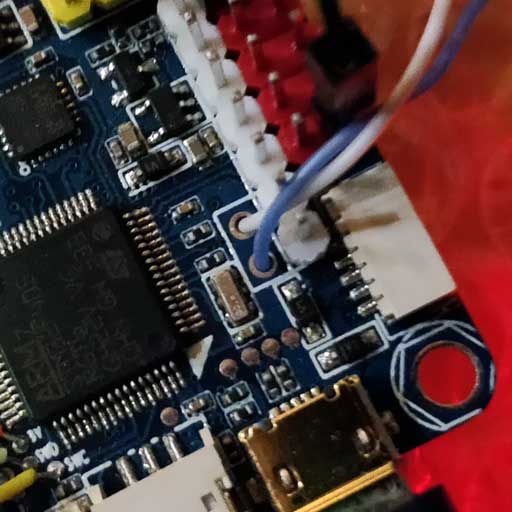
- Airbot Omnibus F4 SD 引脚布局在端口 J10 上(SCL [时钟] / SCA [数据]):
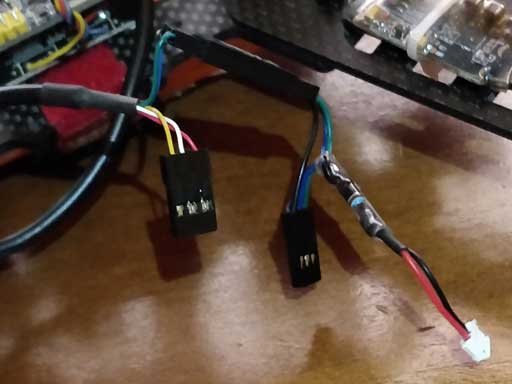
下面是一个实施示例。我使用 Spektrum 插头从 DSM 端口获取 3.3 伏电压,通过 2.2k 电阻器仅将 3.3 伏 + 电压连接到每条线路。
串行端口映射
| UART | 设备 | 港口 |
|---|---|---|
| USART1 | /dev/ttyS0 | 串行 RX |
| USART4 | /dev/ttyS1 | TELEM1 |
| USART6 | /dev/ttyS2 | 全球定位系统 |
遥控遥测
总括系统支持通过以下方式遥测遥控发射机 FrSky 遥测技术 或 CRSF 交叉火力遥测.
CRSF 交叉火力遥测
TBS CRSF 遥测 可用于将飞行控制器的遥测数据(飞行器的姿态、电池、飞行模式和 GPS 数据)发送到遥控发射器(如 Taranis)。
效益超过 FrSky 遥测技术 包括
- 遥控和遥测只需要一个 UART。
- CRSF 协议针对低延迟进行了优化。
- 150 Hz RC 更新率。
- 这些信号是非反相的,因此不需要(外部)反相器逻辑。
信息
如果使用 CRSF 遥测技术,则需要定制 PX4 固件。相比之下,FrSky 遥测可以使用预制固件。
对于总括系统,我们建议使用 TBS Crossfire Nano RX因为它是专门为小型 Quads 设计的。
在手持控制器(如 Taranis)上,您还需要一个 发射机模块.可将其插入遥控控制器的背面。
信息
上述链接包含 TX/RX 模块的文档。
设置
如图所示,连接 Nano RX 和 Omnibus 引脚:
| 总线 UART1 | 纳米 RX |
|---|---|
| 德克萨斯州 | Ch2 |
| RX | 第 1 章 |
接下来更新 TX/RX 模块以使用 CRSF 协议并设置遥测。有关说明见 TBS Crossfire 手册 (搜索'为 CRSF 设置无线电')。
PX4 CRSF 配置
要使用 CRSF,您需要定制固件。更多信息,请参阅 CRSF 遥测.
示意图
示意图由 Airbot: OmnibusF4-Pro-Sch.pdf.
PX4 引导加载程序更新
电路板预装了 Betaflight.在安装 PX4 固件之前,必须确保 PX4 引导加载程序 必须刷新。下载 omnibusf4sd_bl.hex 二进制引导程序并读取 本页 以获取闪光说明。
构建固件
至 建造 PX4 为这一目标:
make omnibus_f4sd_default安装 PX4 固件
您可以使用预置固件或自己定制的固件。
警告
如果您使用 CRSF 遥测 则必须使用定制固件。
固件可通过任何常规方式安装:
构建并上传源代码
上传 make omnibus_f4sd_default加载固件 使用 QGroundControl.
配置
除了 基本配置以下参数非常重要:
| 参数 | 设置 |
|---|---|
| SYS_HAS_MAG | 由于电路板没有内置磁盘,因此应禁用此功能。如果安装了外置磁盘,则可以启用。 |
| SYS_HAS_BARO | 如果电路板上没有气压计,则禁用此功能。 |
更多信息
本页 提供了很好的概述,包括引脚布局和设置说明。