MindPX 硬件
警告
PX4 不生产这种(或任何)自动驾驶仪。请联系 生产商 硬件支持或合规问题。
空气心灵® MindPX 系列是新一代自动驾驶系统,源自 Pixhawk®.

信息
这些飞行控制器 支持的制造商.
快速总结
信息
主要硬件文件如下 这里.
MindPX 是源自 Pixhawk 的新一代自动驾驶系统®在此基础上,我们对《无人驾驶汽车》的示意图和结构进行了修订,并进一步增加了新功能,使无人驾驶汽车更加智能,使用更加方便。
MindPX 将 PWM 输出通道总数增加到 16 个(8 个主输出 + 8 个辅助输出)。这意味着 MindPX 可以支持更复杂的 VTOL 配置和更精细的控制。这对于那些基于 FMU-V4 的飞行控制器来说尤其重要,因为 MindPX 在单个 FMU 中实现了主输出和辅助输出。
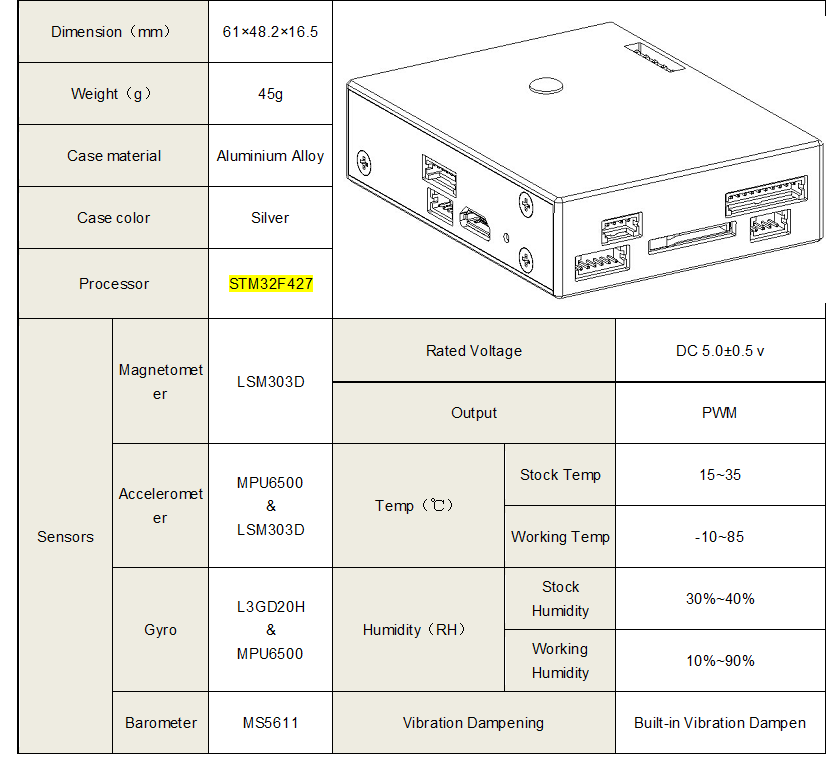
主片上系统:STM32F427
- 中央处理器32 位,168 MHz ARM Cortex® 带 FPU 的 M4
- 内存:256 kb Sram
- 2MB 闪存
- ST Micro LSM303D 14 位加速度计/磁力计
- MEAS MS5611 气压计
- InvenSense® MPU6500 集成 6 轴传感器
突出特点
- 铝合金外壳经 CNC 加工,轻巧坚固
- 内置隔离式 IMU 冗余
- 共有 16 个 PWM 输出通道(8 个主通道 + 8 个辅助通道)
- 1 个额外的 I2C 端口,用于流量连接。
- 1 个额外的 USB 端口,用于连接配套电脑(内置 UART 转 USB 转换器)
- 用于开发的公开调试端口
快速入门
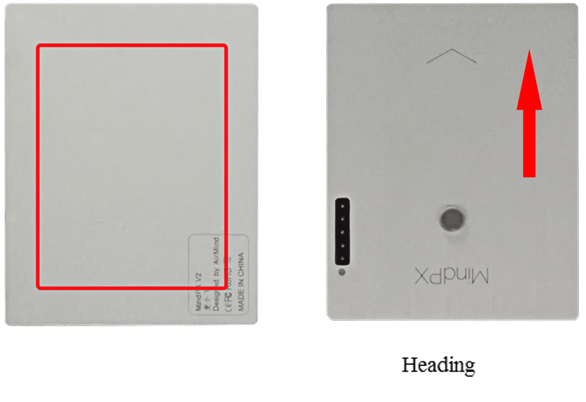
安装
布线
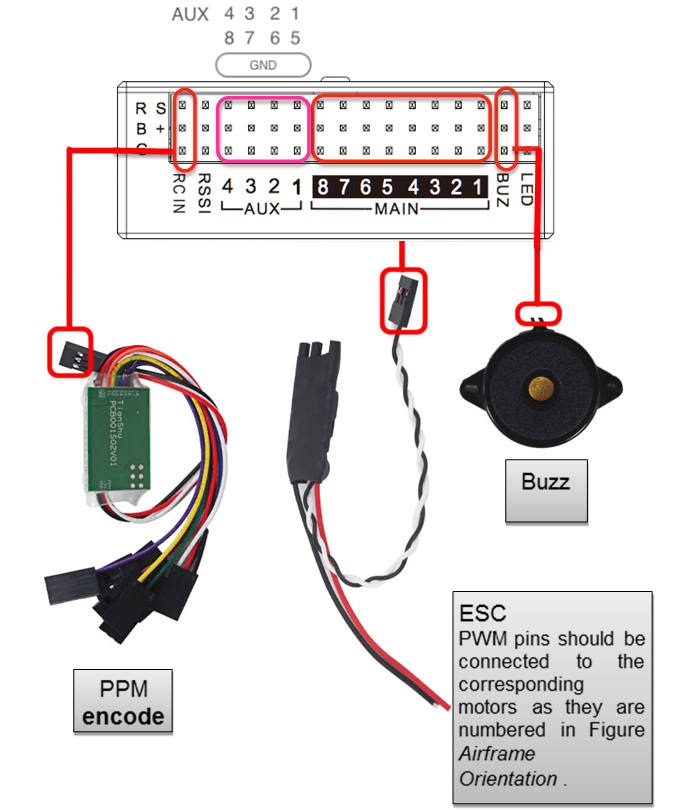
针脚
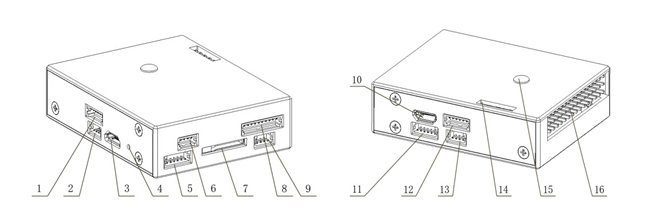
| 编号 | 说明 | 编号 | 说明 |
|---|---|---|---|
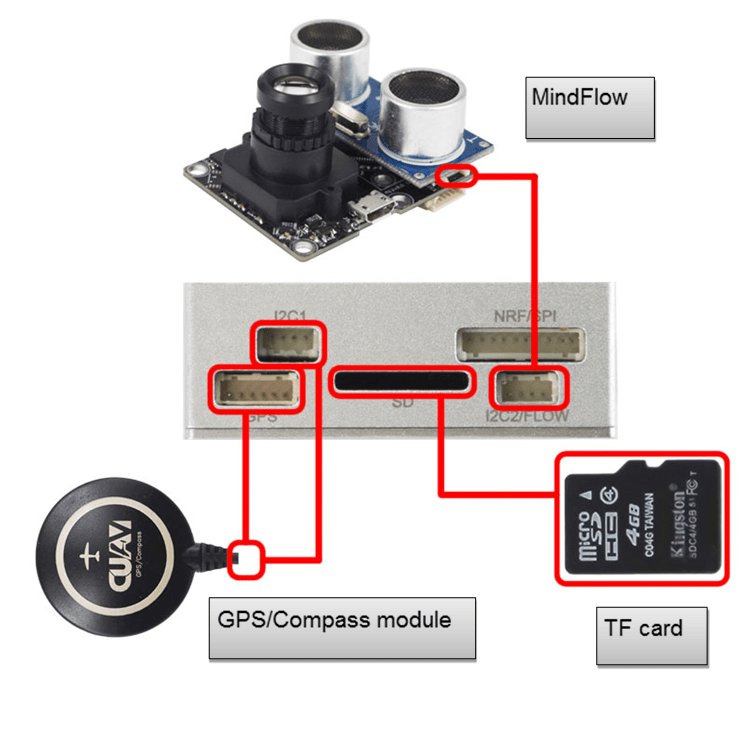
| 1 | 电源 | 9 | I2C2 (MindFLow) |
| 2 | 调试(刷新引导加载程序) | 10 | USB2(串行 2 转 USB) |
| 3 | USB1(刷新固件) | 11 | UART4,5 |
| 4 | 重置 | 12 | UART1(遥测) |
| 5 | UART3 (GPS) | 13 | CAN |
| 6 | I2C1(外部指南针) | 14 | ADC |
| 7 | TF 卡插槽 | 15 | 三色灯 |
| 8 | NRF/SPI(遥控) | 16 | Looper |
无线电接收器
MindPX 支持多种无线电接收器(自 V2.6 版起),包括PPM/SBUS/DSM/DSM2/DSMX。MindPX 还支持 FrSky® 双向遥测 D 端口和 S 端口。
有关详细的引脚图,请参阅 用户指南.
构建固件
TIP
大多数用户无需构建此固件!它已预置并由 QGroundControl 当连接了适当的硬件时。
至 建造 PX4 为这一目标:
make airmind_mindpx-v2_default配套电脑连接
MindPX 板上有一个 USB-TO-UART 桥接器 IC。连接时使用微型 USB 转 USB A 型电缆。将 micro-USB 端连接到 MindPX 的 'OBC'端口,将 USB A 型端连接到配套计算机。
最大 BAUD 速率与 px4 系列相同,最高可达 921600。
用户指南
信息
用户指南 这里.
购买地点
MindRacer 可在以下网址获取 AirMind 商店 在互联网上。您还可以在亚马逊上找到 MindRacer® 或 eBay®.
串行端口映射
| UART | 设备 | 港口 |
|---|---|---|
| USART1 | /dev/ttyS0 | RC |
| USART2 | /dev/ttyS1 | TELEM1 |
| USART3 | /dev/ttyS2 | TELEM2 |
| UART4 | /dev/ttyS3 | GPS1 |
| USART6 | /dev/ttyS4 | ? |
| UART7 | /dev/ttyS5 | 调试控制台 |
| UART8 | /dev/ttyS6 | ? |
支持
请访问 http://www.mindpx.org 获取更多信息。或发送电子邮件至 [email protected] 如需咨询或帮助,请联系