NXP RDDRONE-FMUK66 FMU
警告
PX4 不生产这种(或任何)自动驾驶仪。请联系 生产商 硬件支持或合规问题。
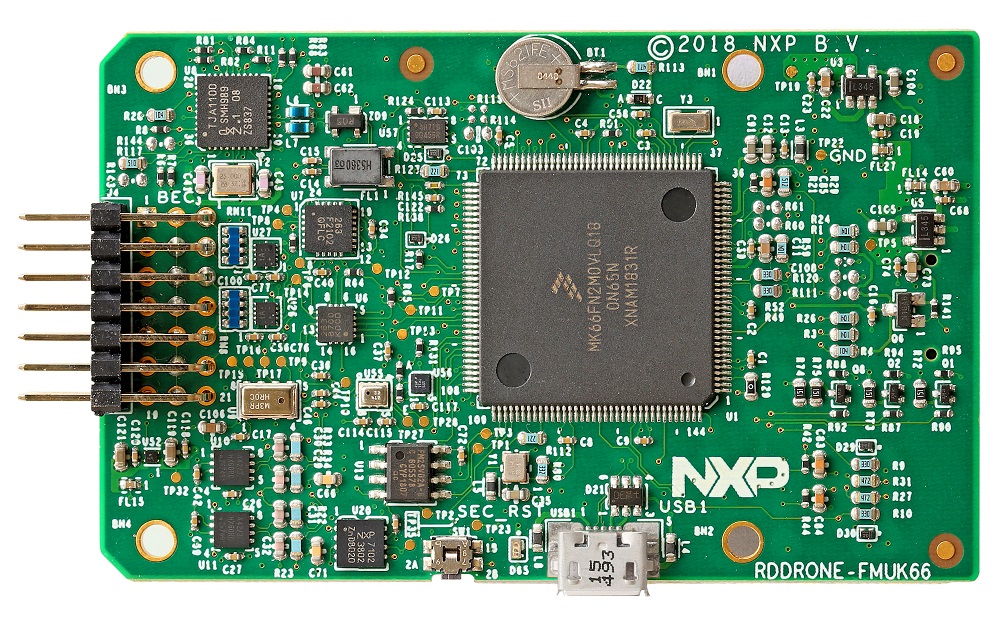
RDDRONE-FMUK66 FMU 是使用恩智浦半导体元件的参考设计,它严格遵循 Pixhawk FMUv4 规范,同时增加了双线汽车以太网 100BASET1 和安全元件 A71CH (RevC) 或 SE050 (RevD)。恩智浦提供原理图、gerbers、BOM 和源文件,因此任何人都可以复制、更改或重新利用此设计。
这是用于以下设备的官方调频单元 悬停游戏.
恩智浦 FMU 和随附外设经测试符合 FCC/CE/RoHs/REACH 指令。
信息
这些飞行控制器 支持的制造商.
快速总结
- 主 FMU 处理器:
- Kinetis K66 MK66FN2MOVLQ18 微控制器,运行频率为 180MHz Cortex-M4F MCU,2MB 闪存,256KB SRAM,双 USB(FS + HS),以太网,144-LQFP。
- 机载传感器
- Accel/Gyro: BMI088/ICM42688 (RevD)...
- 加速度计/磁力计:FXOS8700CQ
- 陀螺仪: FXAS21002CQ
- 磁力计BMM150
- 气压计ML3115A2
- 气压计BMP280
- 全球定位系统:
- u-blox Neo-M8N GPS/GLONASS 接收机;集成磁力计 IST8310
该调频装置仅作为套件提供,包括 Segger Jlink EDU 微型调试器DCD-LZ 调试器适配器、USB-TTL-3V3 控制台电缆、HolyBro GPS 模块、电池供电模块、SDC 卡和外壳、螺丝和贴纸。遥测无线电 (HGD-TELEM433 和 HGD-TELEM915) 必须单独购买,以匹配贵国使用的 ISM 波段频率。

此外,还提供不包括电源模块、GPS、Jlink 或 USB-TTL-3V3 控制台电缆或 SDC 卡的 "Lite"version RDDRONE-FMUK66L。向下滚动,查看 FMUK66 购买页面购买部分中的 FMUK66L
更多信息可参见 技术数据表.
购买地点
RDDRONE-FMUK66 参考设计套件可直接从恩智浦或任何恩智浦授权的全球网络购买。 电子分销商.
- 购买链接 (www.nxp.com)
- 遥测无线电需根据频段单独购买:
信息
RDDRONE-FMUK66 FMU 也包含在完整的 HoverGames 无人机套件中: KIT-HGDRONEK66
组装/设置
https://nxp.gitbook.io/hovergames
构建固件
TIP
大多数用户无需构建此固件!它已预置并由 QGroundControl 当连接了适当的硬件时。
至 建造 PX4 为这一目标:
make nxp_fmuk66-v3_default调试端口
PX4 系统控制台 和 SWD 接口 在 DCD-LZ FMU 调试 港口。
恩智浦的 DCD-LZ 是一个 7 引脚 JST-GH 连接器,并为其增加了 nRST/MCU_RESET 引脚。 Pixhawk 6 针标准调试端口.
DCD-LZ 分线适配器允许使用标准 10 针 JTAG/SWD 接口(即使用 Segger Jlink)和标准 5 针 FTDI USB-TTL-3V3 型电缆。
支持的平台/机身
任何可使用普通遥控伺服器或 Futaba S-Bus 伺服器控制的多旋翼飞行器、飞机、漫游车或船只。支持的全套配置可参见 机身参考.

TIP
恩智浦 HoverGames 无人机套件 (如上图所示)是一个完整的无人机开发套件,其中包括制作四旋翼飞行器所需的一切。您只需提供 3S/4S LiPo 电池。
更多信息
HoverGames 在线文档 PX4 用户和编程指南,具体的组装、构造、调试和编程说明。
支持 HoverGames 和 RDDRONE-FMUK66 的 3DModels 可在以下网站找到 Thingiverse 搜索链接: fmuk66, 悬浮游戏.