3DR Pixhawk 1 飞行控制器(已停产)
警告
该飞行控制器已 停产 目前已不再在市场上销售。您可以使用 mRo Pixhawk 作为即插即用的替代品。
警告
PX4 不生产这种(或任何)自动驾驶仪。有关支持或合规问题,请联系制造商。
3DR Pixhawk® 1 自动驾驶仪是一种流行的通用飞行控制器,基于 Pixhawk 项目 FMUv2 开放式硬件设计(结合了 PX4FMU 和 PX4IO 的功能)。它在 NuttX 操作系统
此处提供与 PX4 配合使用的组装/安装说明: Pixhawk 接线快速入门
主要功能
- 主片上系统: STM32F427
- 中央处理器180 MHz ARM® 皮质® 配备单精度 FPU 的 M4
- 内存:256 kb Sram(L1)
- 故障安全片上系统:STM32F100
- 中央处理器:24 MHz ARM Cortex M3
- 内存: 8 KB SRAM
- Wifi:外置 ESP8266
- GPS: u-blox® 7/8 (Hobbyking®)/ u-blox 6 (3D Robotics)
- 光流 PX4 流量装置
- 冗余电源输入和自动故障切换
- 外部安全开关
- 多色 LED 主视觉指示灯
- 大功率多音压电音频指示器
- microSD 卡,可进行长时间高速记录
连接性
- 1x I2C
- 1x CAN(2x 可选)
- 1x ADC
- 4x UART(2x 带流量控制)
- 1x 控制台
- 8 倍 PWM,带手动超控功能
- 6x PWM / GPIO / PWM 输入
- S.BUS / PPM / Spektrum 输入
- S.BUS 输出
购买地点
该电路板最初由 3DR® 生产,是 PX4® 的原始标准微控制器平台。虽然该电路板不再由 3DR 生产,但您可以使用 mRo Pixhawk 作为即插即用的替代品。
订购 mRo Pixhawk:
- 裸体 - 只有电路板(可用作 3DR Pixhawk 的替代品)
- mRo Pixhawk 2.4.6 基本套件 - 包括除遥测无线电设备以外的所有设备
- mRo Pixhawk 2.4.6 Cool Kit!(限量版) - 包括遥测无线电在内的一切所需物品
规格
处理器
- 32 位 STM32F427 Cortex-M4F 带 FPU 的内核
- 168 兆赫
- 256 KB 内存
- 2 MB 闪存
- 32 位 STM32F103 故障安全协处理器
传感器
- ST Micro L3GD20H 16 位陀螺仪
- ST Micro LSM303D 14 位加速度计/磁力计
- 英维思 MPU 6000 3 轴加速度计/陀螺仪
- MEAS MS5611 气压计
接口
- 5 个 UART(串行端口),1 个高功率,2 个带硬件流量控制
- 2 个 CAN(一个带内置 3.3V 收发器,一个带扩展连接器)
- Spektrum DSM / DSM2 / DSM-X® 卫星兼容输入
- 与 Futaba S.BUS® 兼容的输入和输出
- PPM 和信号输入
- RSSI(PWM 或电压)输入
- I2C
- SPI
- 3.3 和 6.6V ADC 输入
- 内部微型 USB 端口和外部微型 USB 端口扩展
电力系统和保护
- 具有自动故障切换功能的理想二极管控制器
- 伺服轨大功率(最大 10V)和大电流(10A+)就绪
- 所有外设输出均受过流保护,所有输入均受 ESD 保护
额定电压
如果提供三个电源,Pixhawk 可以实现三冗余供电。这三个轨道是电源模块输入、伺服轨输入和 USB 输入。
正常运行 最大额定值
在这些条件下,所有电源将按以下顺序为系统供电
- 电源模块输入(4.8V 至 5.4V)
- 伺服轨输入(4.8V 至 5.4V) 用于手动控制的最高电压为 10 伏,但如果没有电源模块输入,自动驾驶仪部分在 5.7 伏以上将无法供电
- USB 电源输入(4.8V 至 5.4V)
绝对最大额定值
在这种情况下,系统将不消耗任何电能(将无法运行),但仍将保持完好。
- 电源模块输入(4.1V 至 5.7V,0V 至 20V 未损坏)
- 伺服轨输入(4.1V 至 5.7V,0V 至 20V)
- USB 电源输入(4.1V 至 5.7V,0V 至 6V)
示意图
FMUv2 + IOv2 原理图 -- 示意图和布局
信息
作为 CC-BY-SA 3.0 许可的开放式硬件设计,所有原理图和设计文件都是 可用.
连接
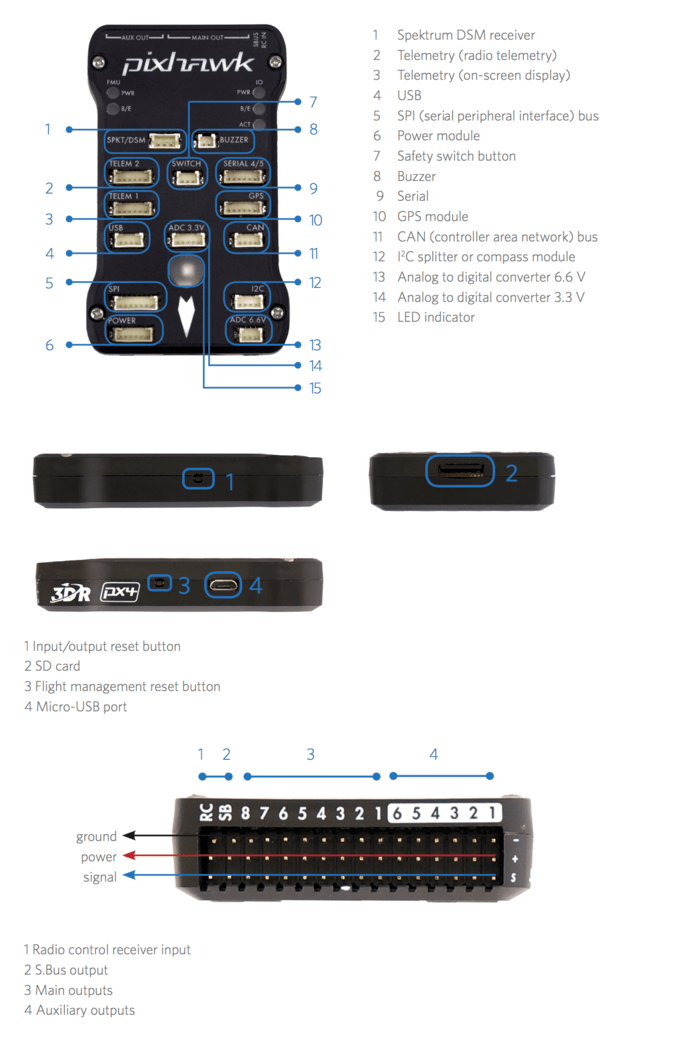
Pixhawk 端口如下所示。这些端口使用 Hirose DF13 连接器(早于 Pixhawk 连接器标准中定义的 JST-GH 连接器)。
警告
许多 3DR Pixhawk 克隆版使用 Molex picoblade 连接器而不是 DF13 连接器。它们的插针是矩形的而不是方形的,因此不能认为它们是兼容的。
TIP
RC IN 端口仅供遥控接收机使用,并为此提供足够的功率。 绝不 将任何舵机、电源或电池连接到它或连接到它的接收机上。
引脚
TELEM1, TELEM2 端口
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | TX (OUT) | +3.3V |
| 3(黑色) | RX (IN) | +3.3V |
| 4(黑色) | CTS (IN) | +3.3V |
| 5(黑色) | RTS (OUT) | +3.3V |
| 6(黑色) | 接地 | 接地 |
GPS 端口
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | TX (OUT) | +3.3V |
| 3(黑色) | RX (IN) | +3.3V |
| 4(黑色) | CAN2 TX | +3.3V |
| 5(黑色) | CAN2 RX | +3.3V |
| 6(黑色) | 接地 | 接地 |
串行 4/5 端口
由于空间限制,一个连接器上有两个端口。
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | 德克萨斯州 (#4) | +3.3V |
| 3(黑色) | RX (#4) | +3.3V |
| 4(黑色) | 德克萨斯州 (#5) | +3.3V |
| 5(黑色) | RX (#5) | +3.3V |
| 6(黑色) | 接地 | 接地 |
ADC 6.6V
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | ADC 输入 | 高达 +6.6V |
| 3(黑色) | 接地 | 接地 |
ADC 3.3V
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | ADC 输入 | 高达 +3.3V |
| 3(黑色) | 接地 | 接地 |
| 4(黑色) | ADC 输入 | 高达 +3.3V |
| 5(黑色) | 接地 | 接地 |
I2C
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | SCL | +3.3(上拉) |
| 3(黑色) | SDA | +3.3(上拉) |
| 4(黑色) | 接地 | 接地 |
CAN
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | CAN_H | +12V |
| 3(黑色) | CAN_L | +12V |
| 4(黑色) | 接地 | 接地 |
SPI
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | SPI_EXT_SCK | +3.3 |
| 3(黑色) | SPI_EXT_MISO | +3.3 |
| 4(黑色) | SPI_EXT_MOSI | +3.3 |
| 5(黑色) | !SPI_EXT_NSS | +3.3 |
| 6(黑色) | GPIO_EXT | +3.3 |
| 7(黑色) | 接地 | 接地 |
权力
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | VCC | +5V |
| 3(黑色) | 当前 | +3.3V |
| 4(黑色) | 电压 | +3.3V |
| 5(黑色) | 接地 | 接地 |
| 6(黑色) | 接地 | 接地 |
开关
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +3.3V |
| 2(黑色) | !IO_LED_SAFETY | 接地 |
| 3(黑色) | 安全 | 接地 |
串行端口映射
| UART | 设备 | 港口 |
|---|---|---|
| UART1 | /dev/ttyS0 | IO 调试 |
| USART2 | /dev/ttyS1 | TELEM1(流量控制) |
| USART3 | /dev/ttyS2 | TELEM2(流量控制) |
| UART4 | ||
| UART7 | 控制台 | |
| UART8 | 序号4 |
调试端口
控制台端口
TIP
连接控制台的便捷方法是使用 Dronecode 探头因为它带有可与多种不同 Pixhawk 设备配合使用的连接器。只需将 6 位置 DF13 1:1 电缆连接到 Dronecode 探头 到 Pixhawk 序号4/5 港口。

引脚输出是标准的串行引脚输出,设计用于连接到 3.3V FTDI 电缆(5V 容差)。
| 3DR Pixhawk 1 | FTDI | |
|---|---|---|
| 1 | +5V(红色) | |
| 2 | S4 Tx | |
| 3 | S4 Rx | |
| 4 | S5 Tx | 5 |
| 5 | S5 Rx | 4 |
| 6 | 接地 | 1 |
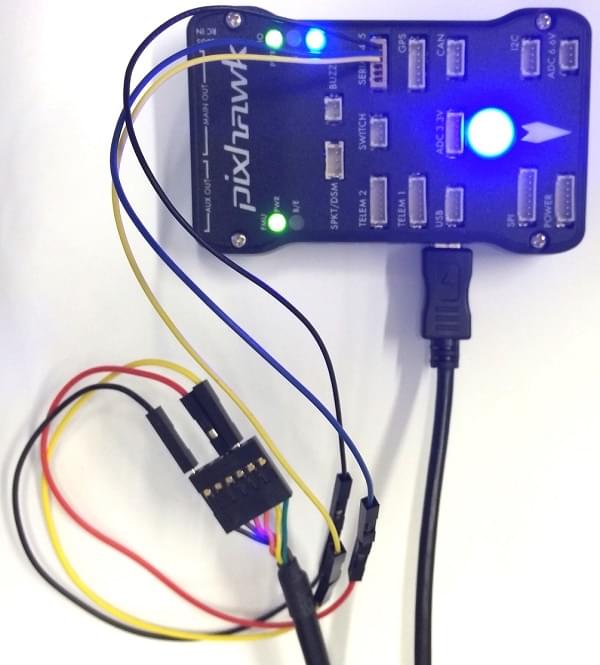
FTDI 电缆与 6 位 DF13 1:1 连接器的接线如下图所示。

完整的接线如下所示。
信息
有关如何 使用 控制台看到: 系统控制台.
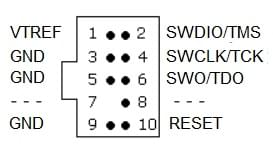
SWD 端口
SWD (JTAG)端口隐藏在盖子下面(硬件调试时必须取下盖子)。FMU 和 IO 有单独的端口,如下所示。
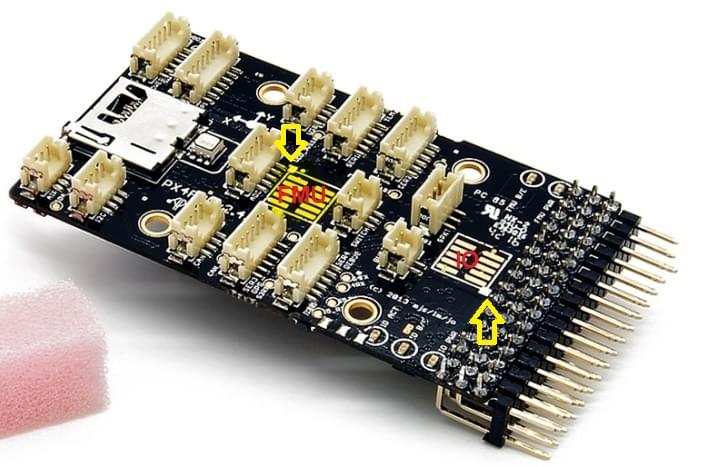
端口是 ARM 10 针 JTAG 连接器,可能需要焊接。端口的引脚分配如下所示(上图四角的方形标记表示引脚 1)。
信息
所有 Pixhawk FMUv2 板都有一个类似的 SWD 端口。
构建固件
TIP
大多数用户无需构建此固件!它已预置并由 QGroundControl 当连接了适当的硬件时。
至 建造 PX4 为这一目标:
make px4_fmu-v2_default部件/外壳
- 臂式微型 JTAG (J6):1.27 mm 10pos 接头(SHROUDED),用于 Black Magic 探头:FCI 20021521-00010D4LF (Distrelec, Digi-Key或 Samtec FTSH-105-01-F-DV-K(未经测试)或 Harwin M50-3600542 (Digikey 或 贸泽)
- JTAG 适配器选件 #1: 黑魔法探针.注意,可能不带电缆(请咨询制造商)。如果是这样,您将需要 Samtec FFSD-05-D-06.00-01-N 电缆Samtec 样品服务 或 Digi-Key 链接:SAM8218-ND)或 标签连接丝带 和一条迷你 USB 电缆。
- JTAG 适配器选件 #2: Digi-Key 链接:ST-LINK/V2 / ST 用户手册需要一个 ARM Mini JTAG 转 20pos 适配器: Digi-Key 链接:726-1193-ND
- JTAG 适配器选件 #3: SparkFun 链接:Olimex ARM-TINY 或任何其他与 OpenOCD 兼容的 ARM Cortex JTAG 适配器,需要一个 ARM Mini JTAG 至 20pos 适配器: Digi-Key 链接:726-1193-ND
- USART:广濑 DF13 6 位置 (Digi-Key 链接:DF13A-6P-1.25H(20))
- 配套设备广濑 DF13 6 位置外壳 (Digi-Key 链接:Hirose DF13-6S-1.25C)
- I2C 和 CAN:广濑 DF13 4 位置 (Digi-Key 链接:DF13A-4P-1.25H(20) - 停产)
支持的平台/机身
任何可使用普通遥控伺服器或 Futaba S-Bus 伺服器控制的多旋翼飞行器、飞机、漫游车或船只。