FunCub QuadPlane(Pixhawk)
Fun Cub QuadPlane VTOL 是一种加装了 QuadCopter 系统的标准尾翼飞机(Multiplex FunCub)。
关键信息
- 框架 多功能 FunCub
- 飞行控制器: Pixhawk

未经改装的 Fun Cub 是一种相对经济实惠的飞机,而且相对容易驾驶。改装后,飞机明显变重,空气动力学性能降低。它仍然飞得很好,但向前飞行时需要 75% 左右的油门。
材料清单
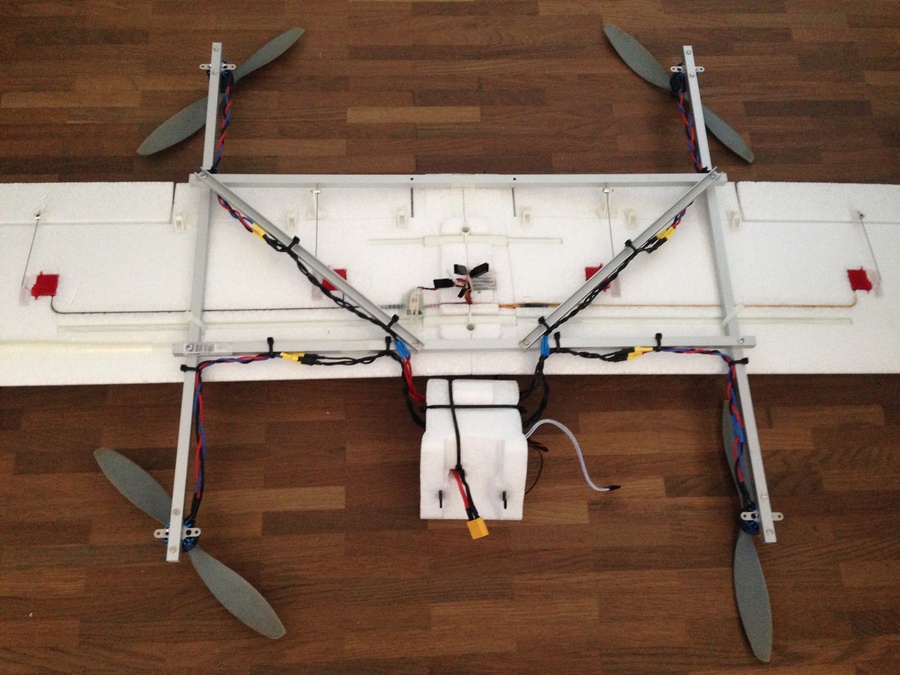
实际飞机大致如上图所示(其他类似模型也可以使用,这是一架 Multiplex Fun Cub)。
所需的最低设备为
- Multiplex FunCub(或类似设备)
- Pixhawk 或兼容
- 数字式空速传感器
- 900 kV 电机(如光圈推进装置 - 电机和电调)
- 用于四马达的 10" 支柱(10x45 或 10x47)
- 用于固定翼发动机的 10" 螺旋桨(10×7)
- GPS 模块
- 4S 电池
- 用于安装四电机的铝制框架(10x10 毫米方管,壁厚 1 毫米)
- 使用 4200mAh 4S 电池时,TOW 约为 2.3 千克。
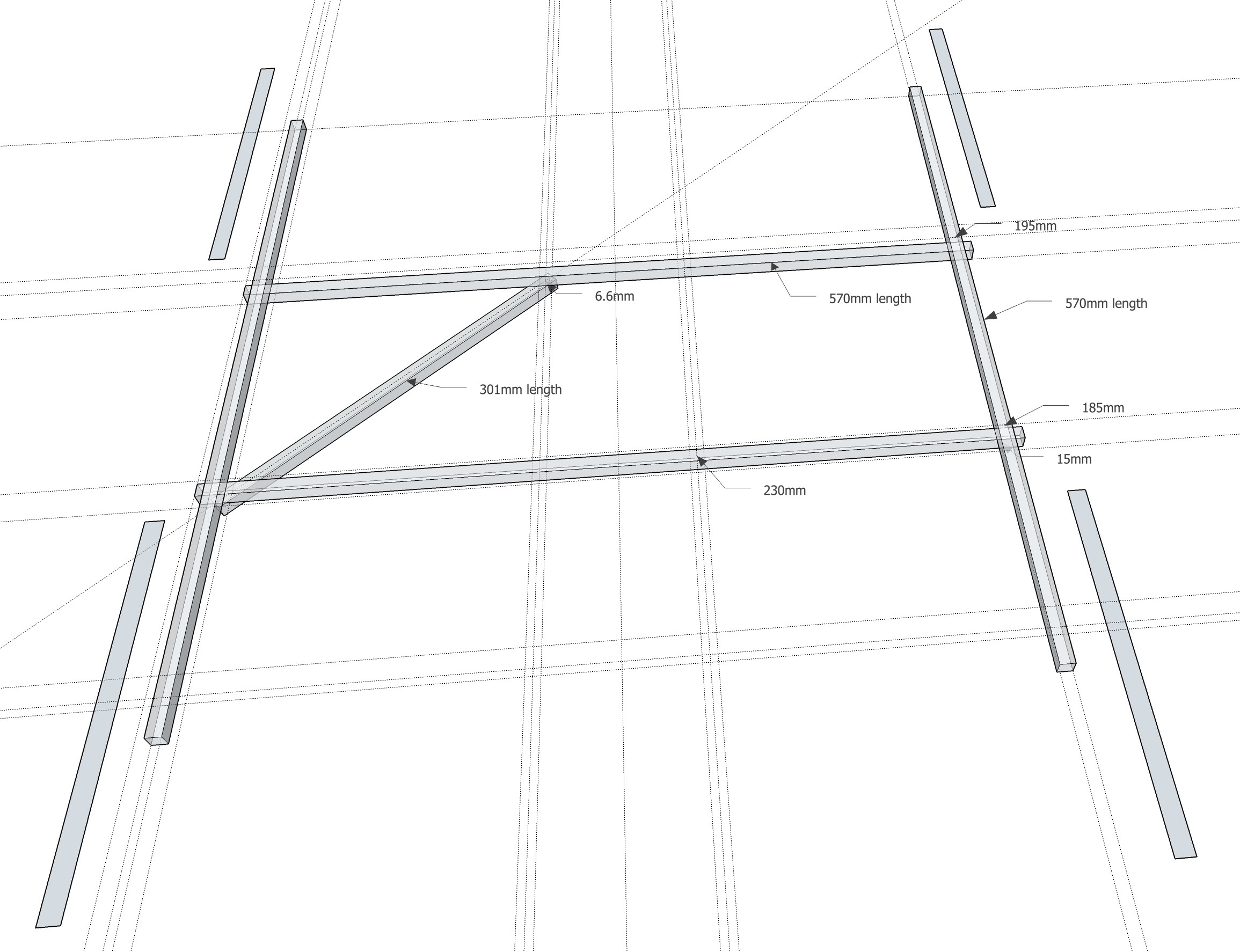
结构
如下图所示,该结构由铝制吊杆组成。
布线
电机和伺服器的接线几乎完全由您自己决定,但应符合 通用标准 VTOL 如机身参考图所示。几何图形和输出分配可在 执行机构配置
例如,您可以像下面这样布线(方向就像坐在飞机上一样):
| 港口 | 连接 |
|---|---|
| MAIN 1 | 右前电机(CCW) |
| MAIN 2 | 左后电机(CCW) |
| MAIN 3 | 左前电机(CW) |
| MAIN 4 | 右后电机(CW) |
| 辅助 1 | 左副翼 TODO |
| 辅助 2 | 右副翼 |
| 辅助 3 | 电梯 |
| 辅助 4 | 舵 |
| 辅助 5 | 节流阀 |
有关接线和配置的进一步说明,请参见: 标准 VTOL 布线和配置.
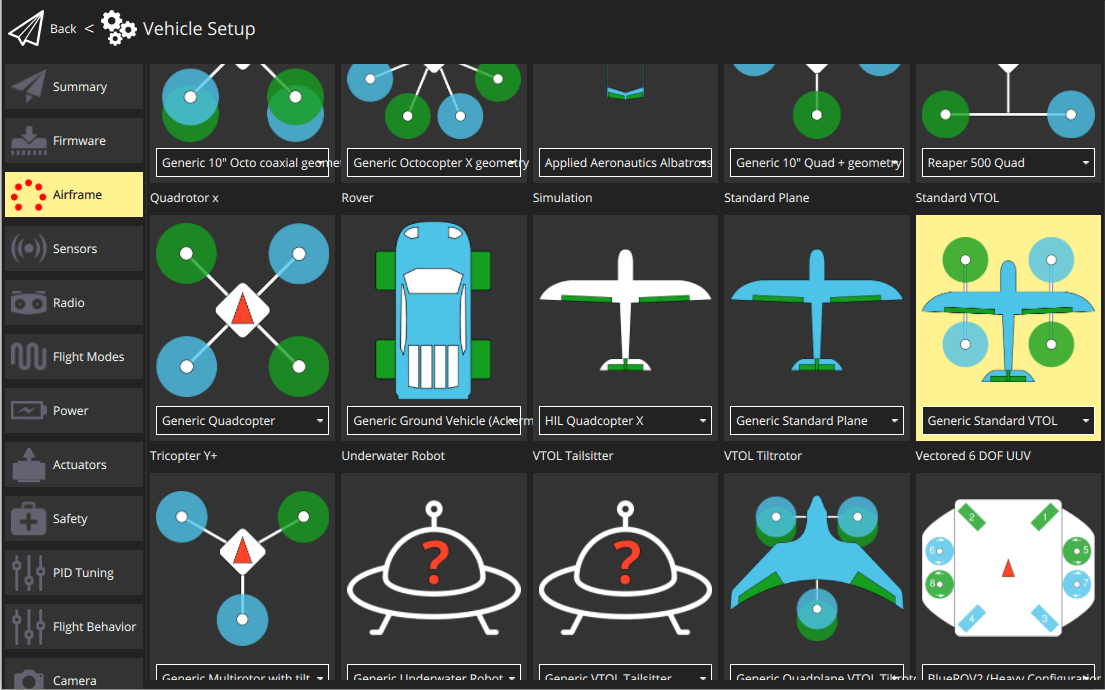
机身配置
对于 机身 选择载具组/类型为 标准 VTOL 具体载具为 通用标准 VTOL 如下图所示(不要忘记点击 应用和重启 在顶部)。
配置输出和几何形状 执行机构配置
默认参数通常足以保证稳定飞行。有关更详细的调整信息,请参阅 标准 VTOL 布线和配置.
完成校准后,VTOL 即可飞行。
视频
支持
如果您对 VTOL 改装或配置有任何疑问,请访问 https://discuss.px4.io/c/px4/vtol.