ModalAI VOXL 飞行
PX4 v1.11警告
PX4 不生产这种(或任何)自动驾驶仪。请联系 生产商 硬件支持或合规问题。
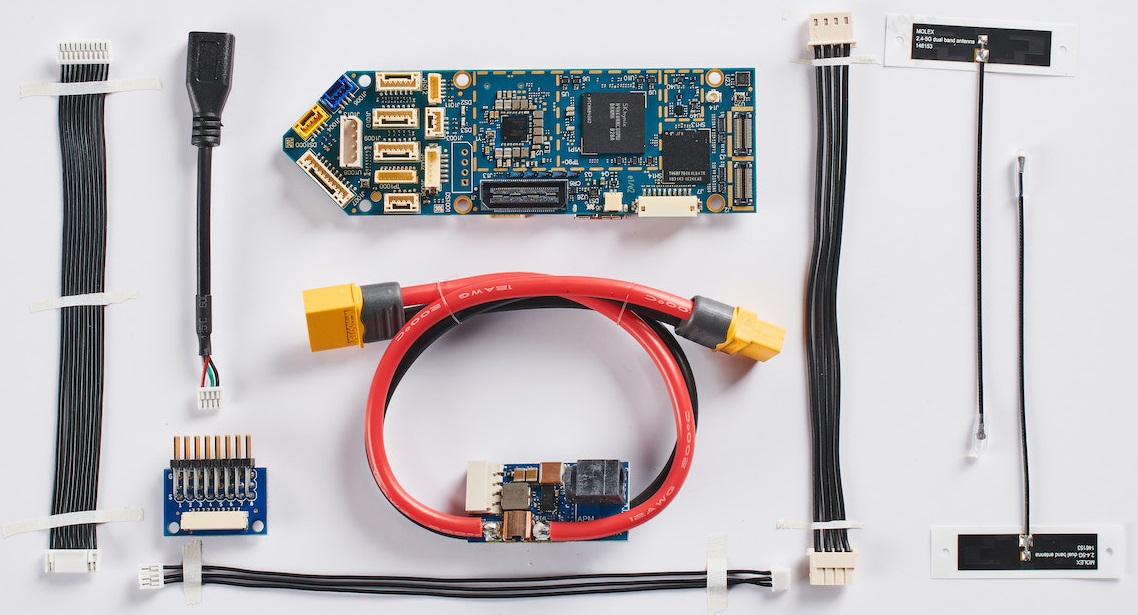
模态AI VOXL 航班 (数据表VOXL Flight)是首批在 STM32F7 上将 Snapdragon 的强大功能和复杂性与 PX4 的灵活性和易用性相结合的计算平台之一。VOXL Flight 由美国制造,支持避障和 GPS(室内)导航,并在单个 PCB 上融合了 PX4 飞行控制器。
信息
该飞行控制器 支持的制造商.
规格
系统
| 特点 | 详细信息 |
|---|---|
| 重量 | 26 g |
伴侣电脑
| 特点 | 详细信息 |
|---|---|
| 基地运行系统 | Linux Yocto Jethro,内核为 3.18。通过在 VOXL 上运行 Docker,还可以使用其他 Linux 操作系统,详情如下 这里 |
| 计算 | 高通骁龙 821,4GB LPDDR4 1866MHz,骁龙 821 数据表, 文件 |
| 中央处理器 | 主频高达 2.15GHz 的四核 CPU |
| GPU | Adreno 530 GPU,频率 624MHz |
| 计算 DSP | 六角计算 DSP (cDSP) 825MHz |
| 传感器 DSP | 六角传感器 DSP (sDSP) 700MHz |
| 视频 | 4k30 视频捕获 h.264/5,720p FPV |
| 摄像机接口 | 支持 MIPI-CSI2、USB UVC 和 HDMI |
| 无线网络 | 预认证 Wi-Fi 模块 QCNFA324 FCCC ID:CPD-QCNFA324QCA6174A 调制解调器、802.11ac 2x2 双频、蓝牙 4.2(双模) |
| 4G LTE | 可选附加模块 |
| 微硬 pDDL | 可选附加模块 |
| 全球导航卫星系统 | WGR7640 10Hz |
| 输入/输出 | 1 个 USB3.0 OTG(ADB 端口),1 个 USB2.0(扩展端口),2 个 UART,3 个 I2C,可配置额外的 GPIO 和 SPI |
| 存储 | 32GB(UFS 2.0),微型 SD 卡 |
| 软件 | Docker, OpenCV 2.4.11, 3.4.6, 4.2, ROS Indigo, Qualcomm Machine Vision SDK, see GitLab 获取大量开源示例! |
| IMU | ICM-42688(SPI10),ICM-20948(SPI1) |
| 气压计 | BMP280 |
飞行控制器
| 特点 | 详细信息 |
|---|---|
| 单片机 | 216MHz、32 位 ARM M7 STM32F765II |
| 内存 | 256KB FRAM |
| 2Mbit 闪存 | |
| 512KB SRAM | |
| 固件 | PX4 |
| IMU | ICM-20602 (SPI1) |
| ICM-42688(SPI2) | |
| BMI088 (SPI6) | |
| 气压计 | BMP388 (I2C4) |
| 安全元件 | A71CH (I2C4) |
| microSD 卡 | 关于支持的卡的信息 |
| 输入 | GPS/Mag |
| Spektrum | |
| 遥测 | |
| CAN 总线 | |
| PPM | |
| 输出 | 6 个 LED(2xRGB) |
| 8 个 PWM 通道 | |
| 额外接口 | 3 个串行端口 |
| I2C | |
| GPIO |
信息
更详细的硬件文件可参见 这里.
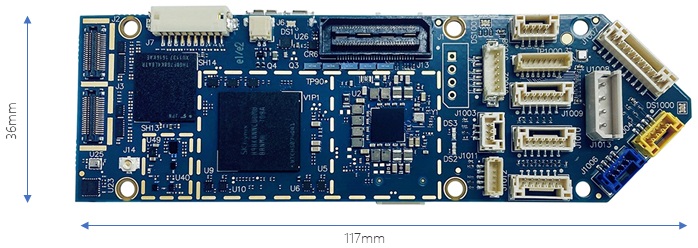
尺寸
PX4 固件兼容性
VOXL 航班 完全兼容 PX4 v1.11 版的 PX4 官方固件。
ModalAI 维护一个 分支 PX4 版本 PX4 v1.11。其中包括 UART ESC 支持以及 VIO 和 VOA 的改进,计划将这些改进上传到上游。
有关固件的更多信息,请参见 这里.
QGroundControl 支持
QGroundControl 4.0 及更高版本支持该电路板。
可用性
快速入门
供应商提供的快速入门指南如下 这里.
voxl-vision-px4
VOXL 航班运行 voxl-vision-px4 在硬件的配套计算机部分上充当某种 MAVLink 代理。详情请查看源代码 这里
连接器
有关引脚布局的详细信息,请参见 这里.
返回顶部
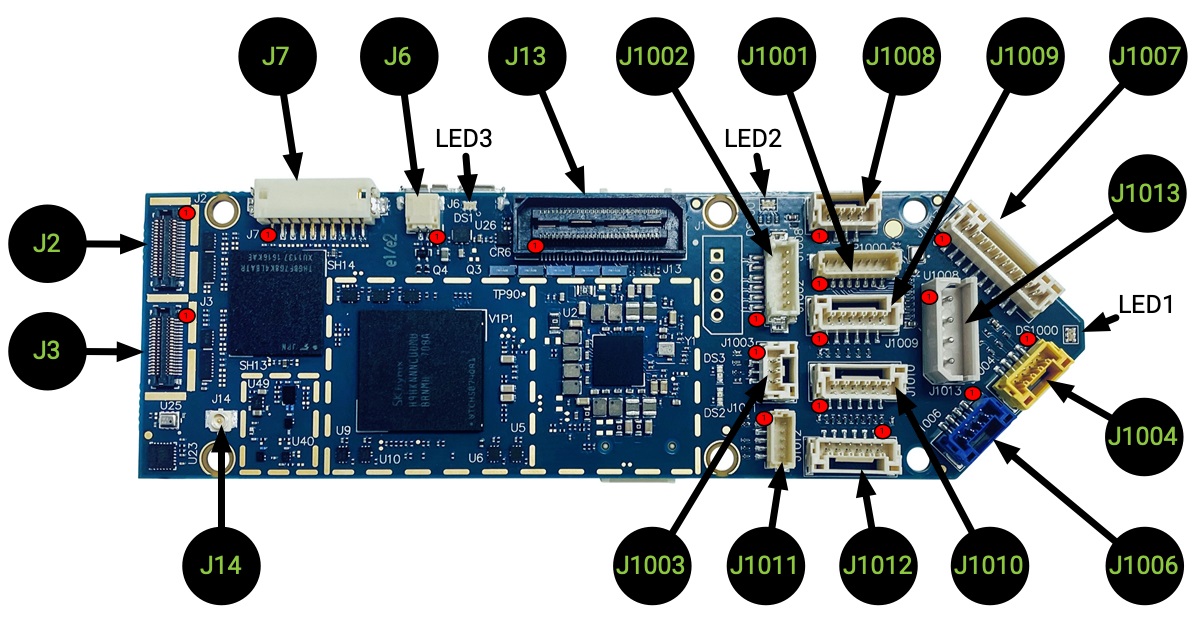
注:可从 STM32/PX4 访问的 1000 系列连接器
| 连接器 | 摘要 | 已使用 |
|---|---|---|
| J2 | Hires 4k 图像传感器(CSI0) | 骁龙 - Linux |
| J3 | 立体图像传感器(CSI1) | 骁龙 - Linux |
| J6 | 冷却风扇连接器 | 骁龙 - Linux |
| J7 | BLSP6(GPIO)和 BLSP9(UART) | 骁龙 - Linux |
| J13 | 扩展 B2B | 骁龙 - Linux |
| J14 | 集成式 GNSS 天线连接 | 骁龙 - Linux |
| J1001 | 编程和调试/UART3 | STM32 - PX4 |
| J1002 | uart esc,uart2/telem3 | STM32 - PX4 |
| J1003 | PPM RC 输入 | STM32 - PX4 |
| J1004 | RC 输入,Spektrum/SBus/UART6 | STM32 - PX4 |
| J1006 | USB 2.0 连接器(PX4/QGroundControl) | STM32 - PX4 |
| J1007 | 8 通道 PWM/DShot 输出 | STM32 - PX4 |
| J1008 | CAN 总线 | STM32 - PX4 |
| J1009 | I2C3、UART4 | STM32 - PX4 |
| J1010 | 遥测(TELEM1) | STM32 - PX4 |
| J1011 | I2C2,安全按钮输入 | STM32 - PX4 |
| J1012 | 外部 GPS 接收器;Mag、UART1、I2C1 | STM32 - PX4 |
| J1013 | 电源输入,I2C3 | STM32 - PX4(为整个系统供电) |
底部
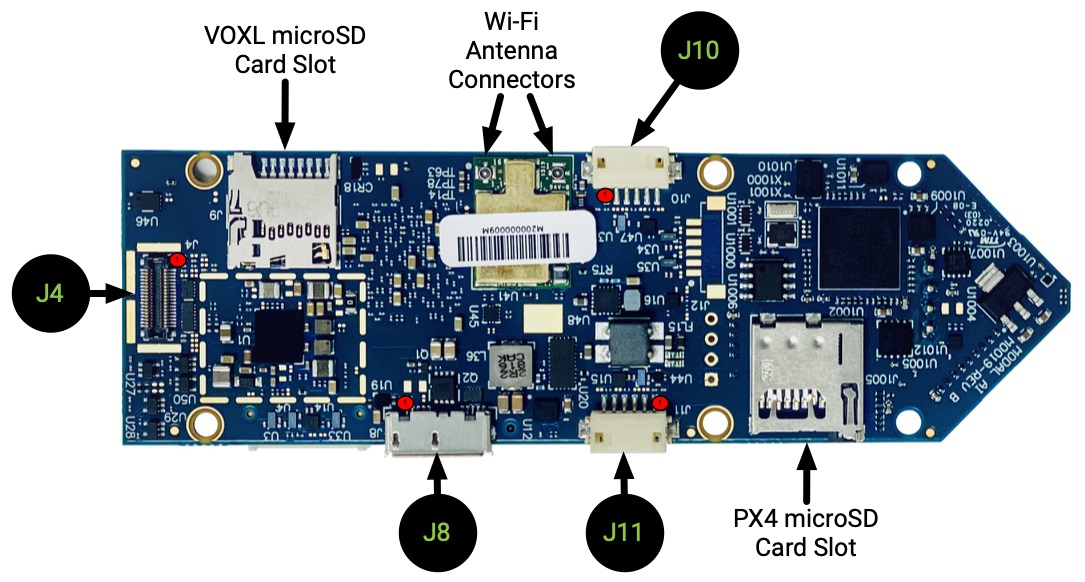
注:可从 STM32/PX4 访问的 1000 系列连接器
| 连接器 | 摘要 | 已使用 |
|---|---|---|
| J4 | 跟踪/光流图像传感器(CSI2) | 骁龙 - Linux |
| J8 | USB 3.0 OTG | Snapdragon - Linux、 adb |
| J10 | 板外 BLSP7 UART 和 I2C | 骁龙 - Linux |
| J11 | 板外 BLSP12 UART 和 I2C | 骁龙 - Linux |
| VOXL microSD | 骁龙 - Linux | |
| PX4 microSD | 最大 32GB | STM32 - PX4 |
| Wi-Fi 天线 | 包括 | 骁龙 - Linux |
用户指南
用户指南全文 这里.
如何建造
至 建造 PX4 为这一目标:
make modalai_fc-v1串行端口映射
注:所示映射仅适用于 PX4 受控接口
| UART | 设备 | 港口 |
|---|---|---|
| USART1 | /dev/ttyS0 | GPS1 (J1012) |
| USART2 | /dev/ttyS1 | TELEM3 (J1002) |
| USART3 | /dev/ttyS2 | 调试控制台 (J1001) |
| UART4 | /dev/ttyS3 | 扩展 UART (J6) |
| UART5 | /dev/ttyS4 | PX4 和配套计算机之间的 UART |
| USART6 | /dev/ttyS5 | RC (J1004) |
| UART7 | /dev/ttyS6 | TELEM1 (J1010) |
| UART8 | /dev/ttyS7 | 不适用 |
支持
请访问 ModalAI 论坛 了解更多信息。