PWM 伺服机械手
本节将介绍如何连接和配置 夹具 使用飞行控制器 PWM 输出(伺服驱动器)进行控制。

支持夹具
以下连接 PWM 的舵机已通过 PX4 测试:
连接 PWM 控制的机械手
PWM 电缆由三根线组成:电源线、地线和信号线。典型的连接器如下图所示:
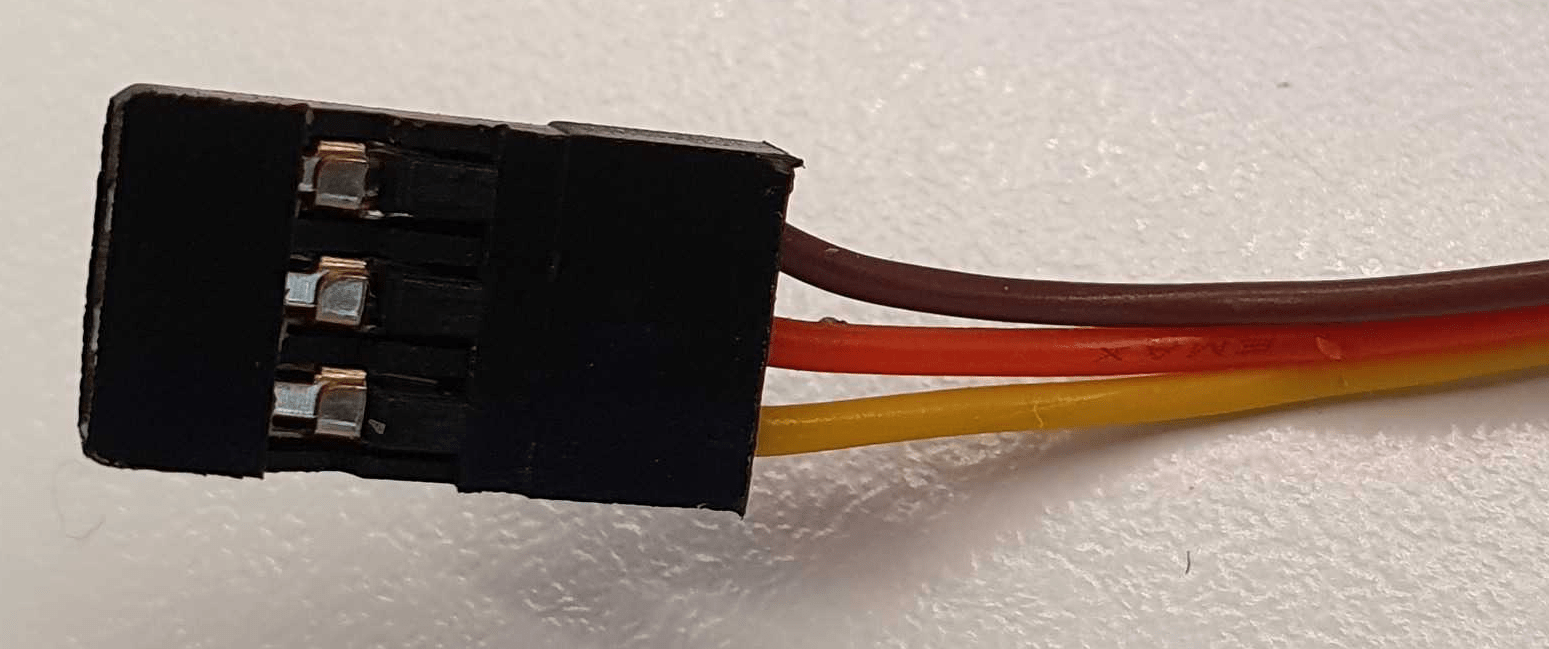
上图中导线颜色的含义如下:
| 导线颜色 | 目的 |
|---|---|
| 棕色 | 地面 |
| 红色 | 电源 |
| 黄色 | PWM 信号 |
您需要将它们适当地连接到飞行控制器的 PWM 输入端。
兼容性检查
连接电缆前,请仔细检查以下要求:
- 信号线电压水平:请查看机械手数据表,了解信号线的电压水平。并确保与飞行控制器引脚的电压电平一致。
- 机械手所需的功率:请查看机械装置的数据表,了解对电源线电压等级的要求。根据这一要求,可将机械手直接连接到电源线上。 电源模块 或连接至 5V 线路。此外,还可以使用定制的电压调节器来输出所需的任何其他电压。
PX4 配置
配置说明见 夹具 > PX4 配置 文件。
特别要注意的是,伺服机械手必须映射到输出端,如下图所示。
致动器映射
PWM 伺服机械手和其他直接连接到 PWM 输出端的外围设备必须在运行时映射到特定的输出端。 执行机构配置.
为此,可将 夹具 函数的输出端口。例如,下图将 夹具 到 PWM AUX5 输出端。
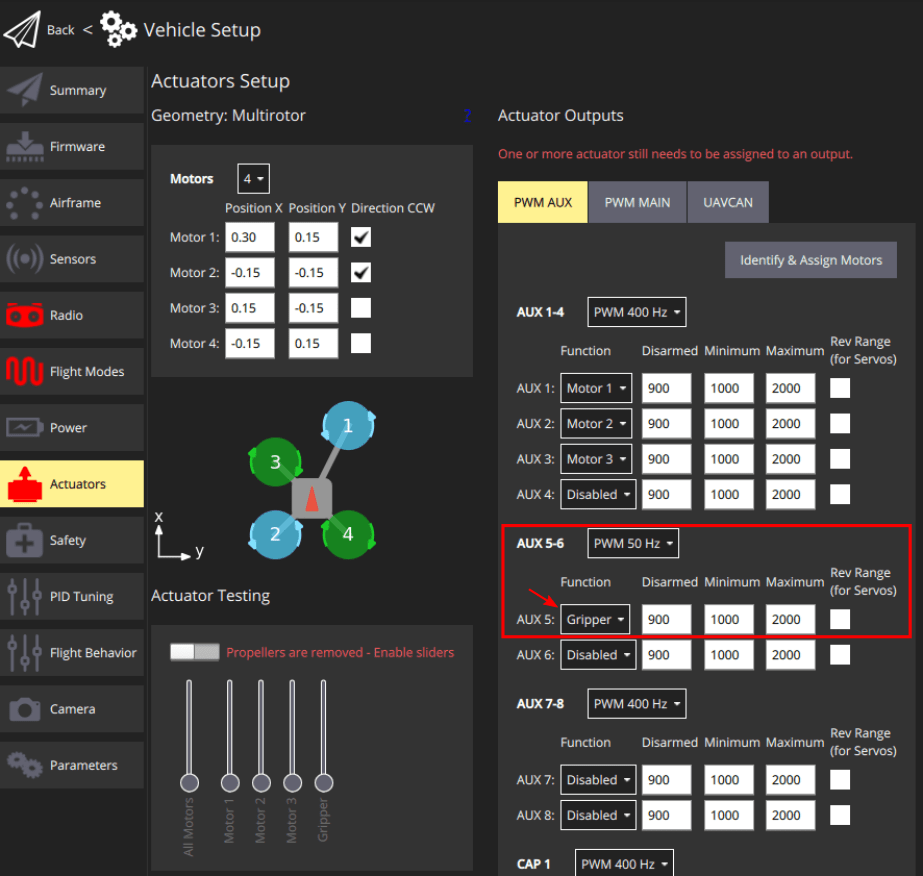
您还必须为机械手输出端口设置正确的 PWM 频率(对于商用伺服器/机械手,通常为 50Hz)。
信息
错误配置频率可能会损坏机械手。
中的滑块 执行器测试 配置屏幕的 "PWM "部分可用于验证移动滑块时输出是否正确。最小和最大 PWM 值应设置为伺服在解除警报位置时完全关闭,而在滑块最大位置时完全打开。