远程 ID(开放式无人机 ID)
实验性
远程 ID 支持是试验性的。
远程身份识别(Remote ID)是日本、美国和欧盟针对无人机的一项政府强制技术,旨在实现无人机与其他飞机之间的空域安全共享。该规范要求无人机广播数据,如:实时位置/高度、序列号、操作员 ID/位置、状态等。
PX4 可与针对 FAA 的远程 ID 模块配合使用 标准远程识别规则.这些模块旨在集成到载具中,并利用自动驾驶仪提供的 ID、位置和其他信息广播开放式无人机 ID 信息。标准规则模块比广播规则模块的操作限制更少,后者是带有集成 GPS 的独立模块,不与自动驾驶仪进行任何通信。
支持的硬件
PX4 与支持以下功能的 Remote ID 硬件集成 打开无人机 ID MAVLink 协议(Open Drone ID 是 Remote ID 的开源实现)。
它已通过以下设备的测试:
- 立方体 ID (CubePilot)
- Db201 蓝标
- Db202mav (BlueMark) - 不带 CAN 端口,价格较低。
- Holybro RemoteID 模块 (霍利布洛)
信息
- 其他支持 MAVLink API 的设备也应该可以使用(但尚未进行测试)。
- 在 PX4 v1.14 中,PX4 不支持 CAN 远程 ID。
硬件设置
远程 ID 设备可连接到飞行控制器上任何空闲/未使用的串行端口。最常见的是直接连接到 TELEM2 端口(如果未用于其他目的),因为默认情况下已为 MAVLink 配置了该端口。
立方体 ID
立方体 ID 可使用其串行端口连接(不能使用 DroneCAN)。它配有一根 6 针 JST-GH 1.25 毫米电缆,可直接连接至 电话 最新 Pixhawk 飞行控制器上的端口。
如果使用不同的端口,或使用不同连接器的飞行控制器,可能需要修改电缆。串行端口的引脚分配如下所示。飞行控制器上的 TX 和 RX 必须分别与远程 ID 上的 RX 和 TX 相连。
立方体 ID 串行端口
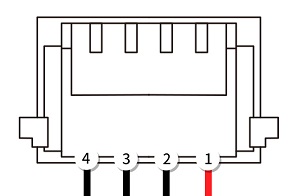
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC_5V | 5V |
| 2(黑色) | TX (OUT) | |
| 3(黑色) | RX (IN) | |
| 4(黑色) | 接地 | 0 |
立方体 ID 固件
Cube ID 使用专有固件(非 ArduRemoteID 就像其他一些远程身份信标一样)。
有关固件更新说明,请参阅 立方体 ID > 更新.
BlueMark Db201/Db202mav
Db201 或 Db202mav 可使用其串行端口连接(不能使用 DroneCAN)。它们配有一根 6 针 JST-GH 1.25 毫米电缆,可直接连接至 电话 最新 Pixhawk 飞行控制器上的端口。
如果使用不同的串行端口(即引脚较少),或使用不同连接器的飞行控制器,则可能需要修改电缆。有关端口引脚的信息可在 用户指南.
信标预装了最新的 ArduRemoteID 固件。固件 用户指南 说明了如何在需要时通过网络界面更新固件。
更多的常规设置,包括如何安装信标,也包含在 用户指南
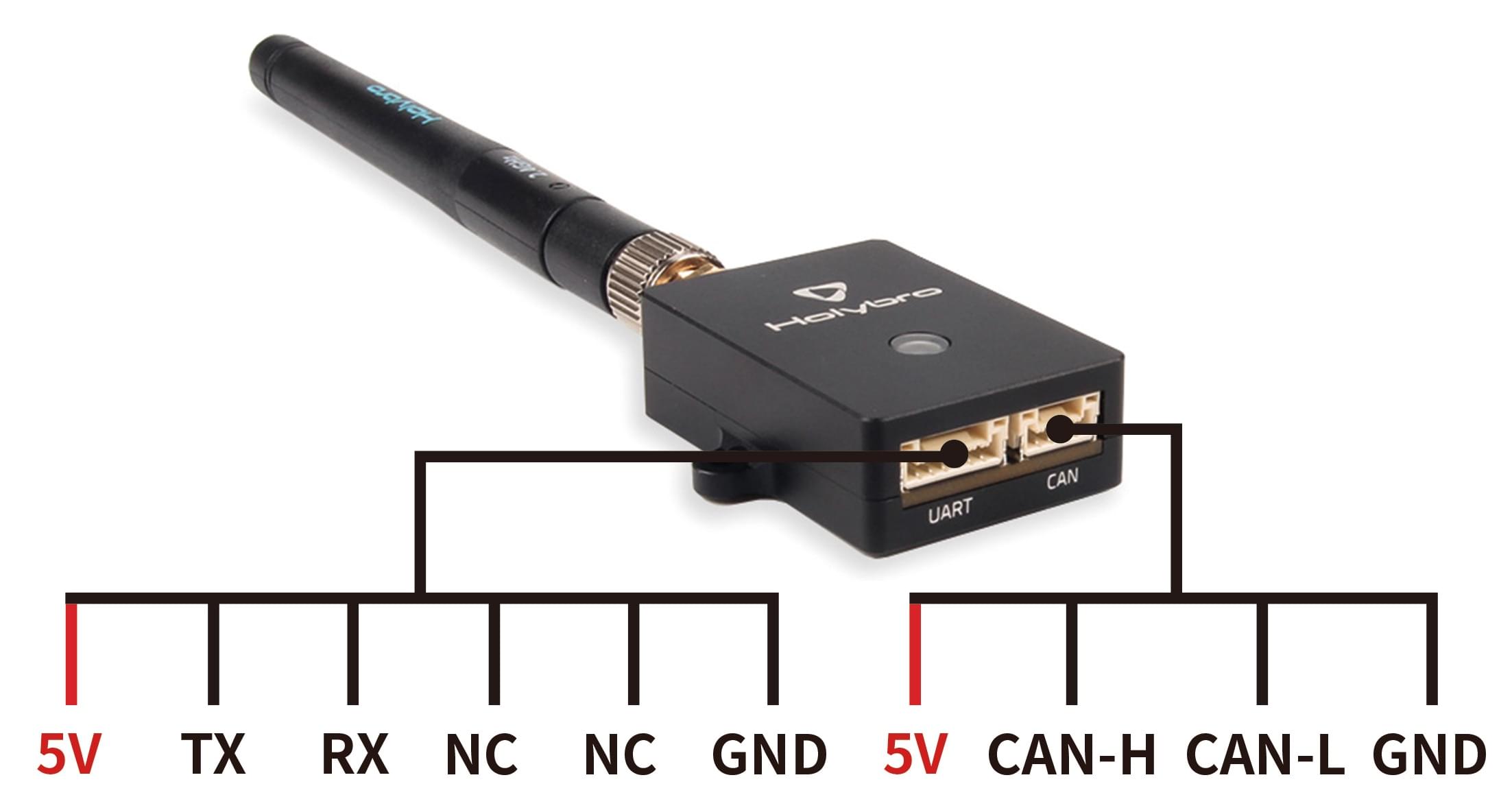
Holybro 远程 ID 模块
Holybro 远程 ID 模块 可使用串行端口连接(撰写本文时无法使用 DroneCAN:PX4 v1.14)。它配有一根 6 针 JST-GH 1.25 毫米电缆,可直接连接到 电话 大多数最新的 Pixhawk 飞行控制器(如 Pixhawk 6C/6X 或 Cube Orange)都配备了该端口。
模块预装了最新的 ArduRemoteID 固件。固件 用户指南 说明了如何在需要时通过网络界面配置和更新固件。
圣溪引脚
注意:PX4 v1.14 不支持 CAN 端口
PX4 配置
端口配置
远程 ID 硬件的配置方式与其他硬件相同。 MAVLink 外围设备.
假设您已将设备连接至 TELEM2 港口、 设置参数 如图所示:
- MAV_1_CONFIG =
电话 2 - MAV_1_MODE = 正常
- MAV_1_RATE = 0(端口默认发送速率)。
- MAV_1_FORWARD = 已启用
然后重新启动载具。
现在,您会发现一个名为 SER_TEL2_BAUD.所需的波特率取决于所使用的远程 ID(对于 Cube ID,必须设置为 57600)。
启用远程 ID
无需显式启用远程 ID(受支持的远程 ID 信息要么默认为流式,要么必须在当前实现中请求,即使没有连接远程 ID)。
防止根据远程 ID 上膛
只允许在远程 ID 就绪时上膛、 设置 参数 COM_ARM_ODID 至 2 (默认禁用)。
| 参数 | 说明 |
|---|---|
| COM_ARM_ODID | 启用无人机 ID 系统检测和健康检查。 0:禁用(默认)、 1:如果未检测到远程 ID 则发出警告,但仍允许上膛、 2:仅当远程 ID 存在时才允许上膛。 |
模块广播测试
集成商应测试远程 ID 模块是否广播了正确的信息,如无人机位置、ID、操作员 ID 等。使用移动设备上的第三方应用程序最容易做到这一点:
- 无人机扫描仪 (谷歌播放器或苹果应用商店)
- OpenDroneID OSM (Google Play)
实施情况
PX4 v1.14 默认串流这些信息(串流模式:正常、板载、USB、板载低带宽):
打开龙标识位置 (1 Hz) - 无人飞行器的位置、高度、方向和速度。
开放式龙标识系统 (1 Hz)操作员位置/高度、多架飞机信息(组/群,如适用)、完整的时间戳和可能的类别/等级信息。
- 实施时假定操作员位于载具原点(尚不支持从 GCS 获取操作员位置)。对于仅广播的远程 ID 而言,这被认为是合规的。
以下信息可根据要求进行流式传输(使用 mav_cmd_set_message_interval):
- open_drone_id_basic_id - 无人飞行器身份信息(主要是序列号)
- PX4 v1.14 指定了一个序列号 (mav_odid_type_serial_number),但没有使用规定的格式(ANSI/CTA-2063 格式)。
如果参数 COM_ARM_ODID 设置为 2.然后,无人驾驶飞行器需要 心跳 远程 ID 发出的信息,作为上膛无人飞行器的先决条件。您也可以将参数设置为 1 以发出警告,但当远程 ID 心跳 未检测到信息。
PX4 v1.14 中不支持以下 Open Drone ID MAVLink 消息(将由 PX4#21647):
- open_drone_id_authentication - 为无人飞行器提供认证数据。
- open_drone_id_self_id - 操作员身份(纯文本)。
- open_drone_id_operator_id - 操作员身份。
- 打开龙标识臂状态 - 远程 ID 硬件的状态。用作载具上膛和远程 ID 健康检查的条件。
- open_drone_id_system_update - 子集
开放式龙标识系统可以以更高的速率发送信息。
合规性
PX4 可能不符合 1.14 版的相关规范(这也是该功能目前处于试验阶段的原因)。已成立了一个工作组来评估这些差距。
已知的问题包括
- 载具必须在收到远程 ID 后才能启动 打开龙标识臂状态 消息,其状态表明远程 ID 硬件已准备好广播。
- PX4 v1.14 无法处理
打开龙标识臂状态上膛仅以远程 ID 设备为条件心跳.
- PX4 v1.14 无法处理
- 远程 ID 的健康状况取决于同时接收到
心跳和打开龙标识臂状态.飞行时,远程身份标识的非上膛状态必须在 OPEN_DRONE_ID_LOCATION.status 作为远程 ID 故障。- PX4 v1.14 尚未收到
打开龙标识臂状态.
- PX4 v1.14 尚未收到
打开龙标识臂状态必须转发给 GCS(如有),以进行额外的错误报告。- open_drone_id_basic_id 指定的序列号格式无效(非 ANSI/CTA-2063 格式)。
- 载具 ID 预计将具有防篡改功能。
PX4-Autopilot/21647 旨在解决已知问题。
另请参见
- 无人机远程识别 (FAA)