漫游车(UGV)
PX4 支持漫游车(无人地面运载工具--UGV),其功能包括 阿克曼和差分 转向。
本节包含组装和配置多个 UGV 框架的构建日志/说明。

UGV无人车类型
PX4 支持以下漫游车
- 差速转向转向:通过以不同的速度移动左侧和右侧车轮来控制方向。这种转向方式常用于推土机、坦克和其他履带式载具。
- 阿克曼转向方向控制:车轮指向行驶方向 (阿克曼几何 补偿转弯内侧和外侧车轮以不同速度移动的情况)。这种转向系统适用于大多数商用载具,包括轿车、卡车等。
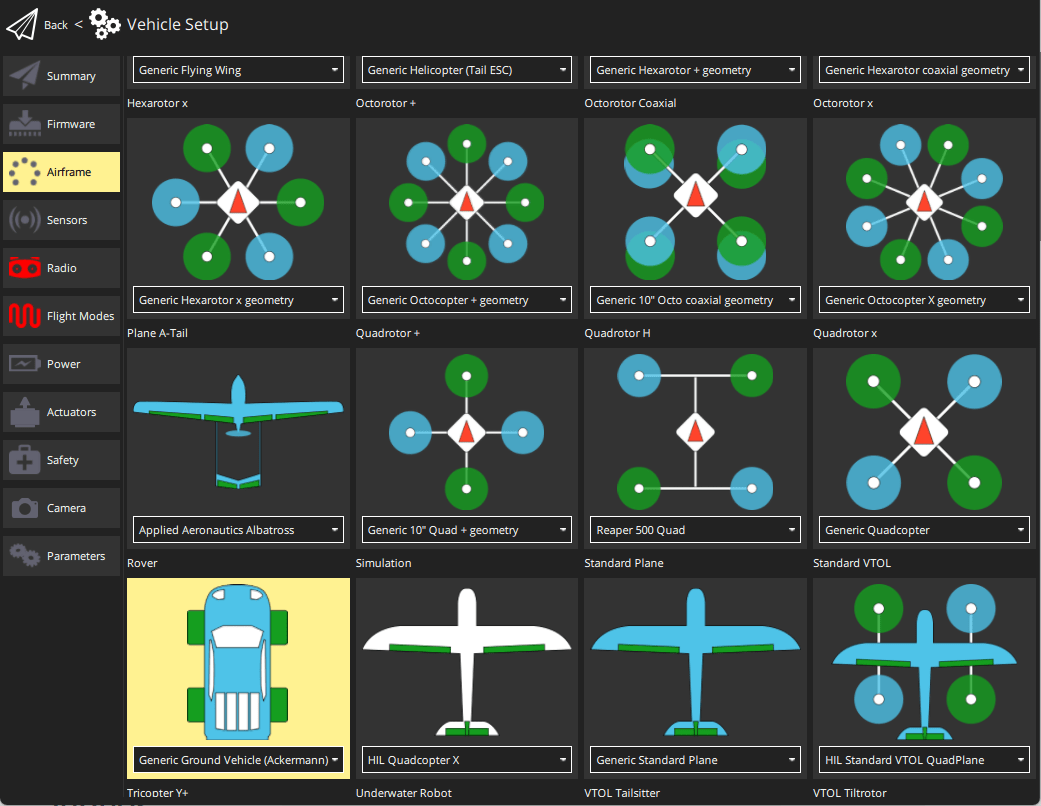
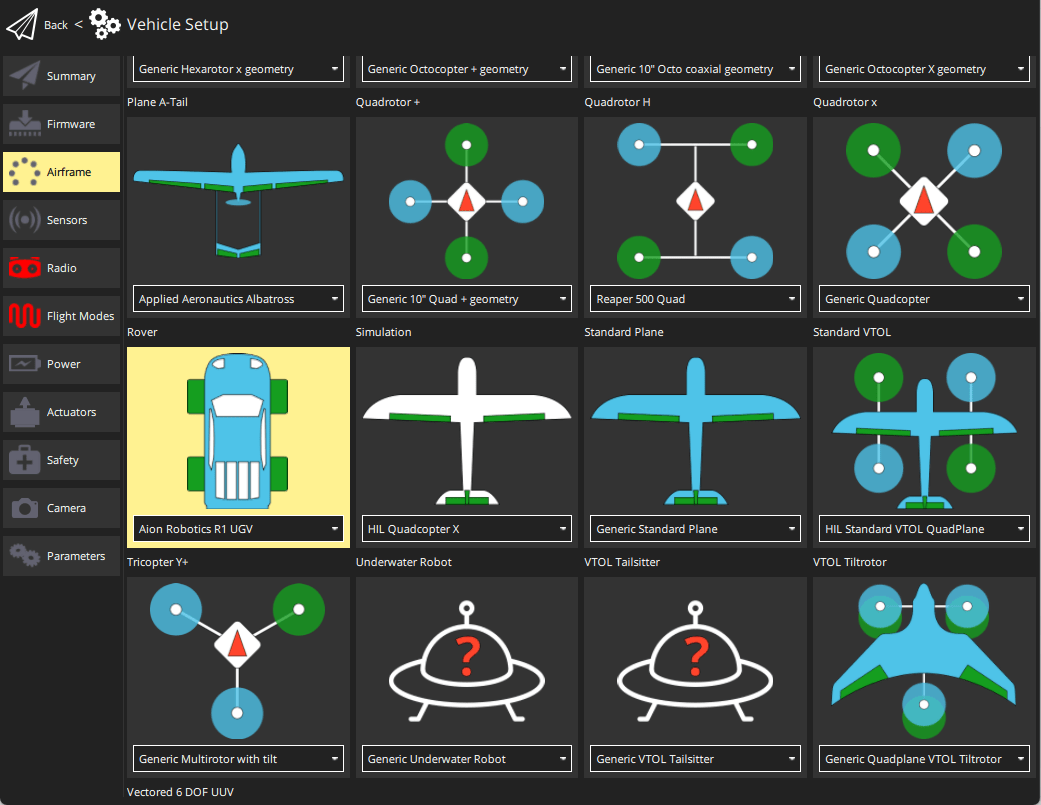
支持的框架可参见 机身参考 > 路虎.
如何配置漫游车
阿克曼转向系统配置
安装配备阿克曼转向系统的漫游车非常简单:
差速转向配置
在 机身 配置,选择 Aion Robotics R1 UGV 或 恩智浦杯竞赛DF 机器人 GPX
选择 应用和重启 按钮。
- 打开 致动器配置与测试 并将左右电机功能映射到飞行控制器输出。
模拟
经典仿真场景Gazebo 提供了这两种转向的模拟:
视频
这段视频展示了 Traxxas Stampede Rover (一辆阿克曼汽车)。