光流
光流 使用一个向下摄像头和一个向下距离传感器进行速度估算。基于光流的导航由估算器启用:EKF2 和 LPE(已废弃)。
设置
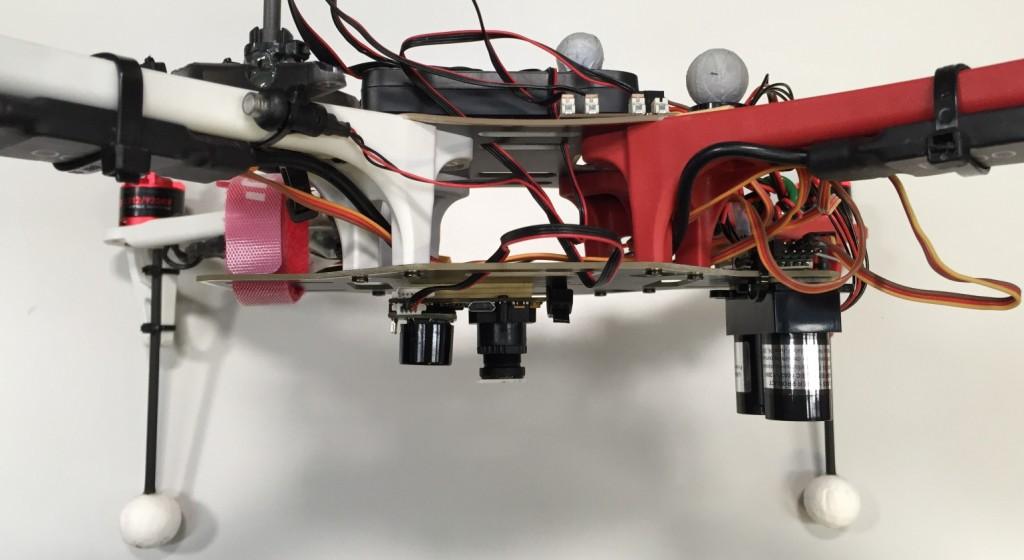
光流设置需要一个朝下的摄像头和一个 距离传感器 (最好是激光雷达)。这些设备可通过 MAVLink、I2C 或任何其他支持外设的总线连接。
向不同方向运动时的流量输出必须如下:
| 载具移动 | 综合流量 |
|---|---|
| 前锋 | + Y |
| 向后 | - Y |
| 对 | - X |
| 左侧 | + X |
对于纯旋转 integrated_xgyro 和 集成_x (分别为 integrated_ygyro 和 综合_y) 必须相同。
流量传感器/摄像头
PX4Flow
PX4Flow 是一种光学流量相机,可在室内和室外微光条件下工作,无需 LED 照明。它是计算光流的最简单、最成熟的方法之一。
基于 PMW3901 的传感器
PMW3901 是一种光学流量跟踪传感器,类似于电脑鼠标,但工作范围在 80 毫米到无限远之间。它被用于许多产品中,包括 Bitcraze、Tindie、Hex、Thone 和 Alientek 的一些产品。
其他摄像头/传感器
也可以使用集成了摄像头的电路板/四核处理器(如 Snapdragon Flight)。为此 光流软件仓库 (另见 snap_cam).
测距仪
您可以使用任何支持的 距离传感器.不过,我们建议使用激光雷达而不是声纳传感器,因为激光雷达坚固耐用,精度高。
估算器
扩展卡尔曼滤波器 (EKF2)
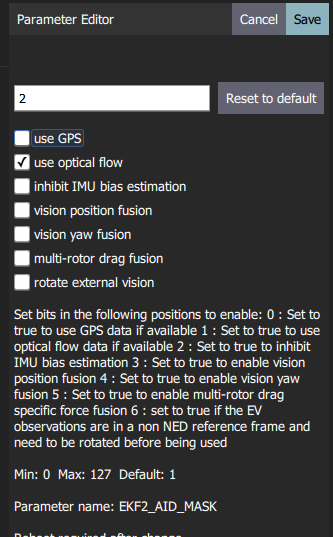
要使用 EKF2 进行光流融合,请在 EKF2_AID_MASK 参数,如下面使用 QGroundControl 所示:
如果光流量传感器偏离载具中心,可以使用以下参数进行设置。
| 参数 | 说明 |
|---|---|
| EKF2_OF_POS_X | 光流焦点在主体框架中的 X 位置(默认为 0.0m)。 |
| EKF2_OF_POS_Y | 光流焦点在主体框架中的 Y 位置(默认为 0.0m)。 |
| EKF2_OF_POS_Z | 光流焦点在主体框架中的 Z 位置(默认为 0.0 米)。 |