停产:Falcon Vertigo Hybrid VTOL RTF (Dropix)
已停产: 该飞行器所基于的 Falcon Venturi FPV Wing 框架已停产。
猎鹰 Vertigo 混合动力 VTOL 是一款四翼 VTOL 飞机,设计用于 PX4 和 Dropix(兼容 Pixhawk)飞行控制器。它可以携带小型 GoPro 摄像机。
除遥控接收器和遥测模块外,RTF 套件包含全套系统所需的一切。这些组件也可单独购买。
关键信息
- 框架 猎鹰 Vertigo 混合动力 VTOL
- 飞行控制器: Dropix
- 翼展: 1.3m

材料清单
RTF 套件中几乎提供了您所需的一切(下面组件旁边的链接是为了方便您单独购买任何组件):
- 预层压 EPP 机翼
- 翼尖和全套硬件
- Dropix 飞行控制器
- GPS Ublox M8N
- 功率传感器
- 空速传感器
- 四动力机组 T-Motor
- 4 x 螺旋桨 10”x 5”(四马达)
- 4 x 电调 25A
- 1 x 螺旋桨 10” x 5”(推杆马达)
- 1 x ESC 30A
- 推杆马达动力系统
- 碳纤维管和支架
- G10 发动机支架
- 1 x 3700mah 4S 30C 锂电池
- 配电板和电缆
套件不含无线电接收器或遥测模块(可选)。在这次制造中,我们使用了以下组件:
所需工具
装配机身时使用了以下工具:
- 飞利浦螺丝刀
- 5.5 毫米内六角螺丝刀
- 剪线钳
- 烙铁和焊料
- 业余爱好 不锈钢镊子
- 大猩猩胶水
- 玻璃纤维增强胶带

组装步骤
RTF 套件需要进行以下组装。
步骤 1:安装电机支架
如图所示,在机翼支架内涂抹猩猩胶水。
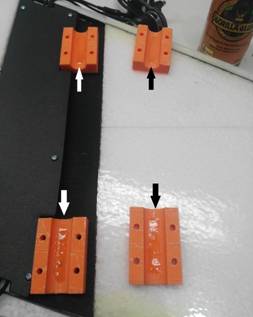
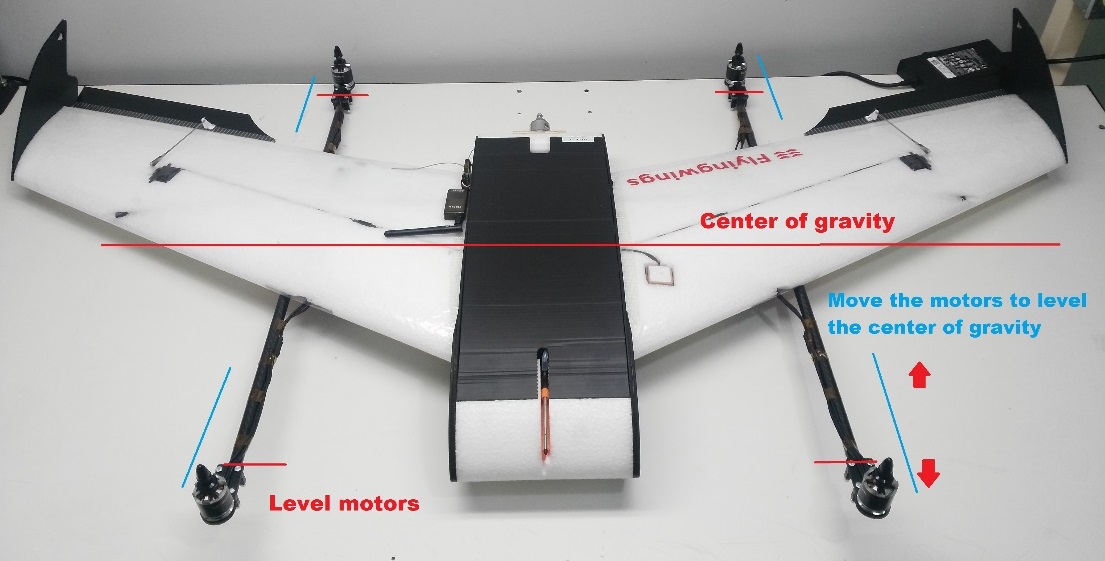
将碳管安装到支架上。支架和碳管必须通过白色标记对齐(如图所示)。
这一点非常重要,因为白色标记表示重心。

以下图片展示了从其他视角观察到的棒材排列情况:
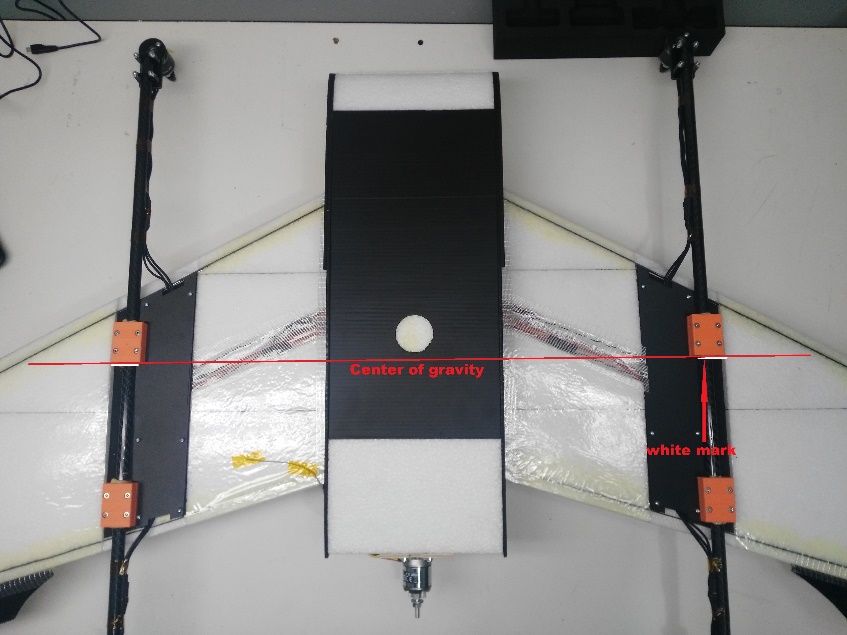
步骤 2:安装机翼
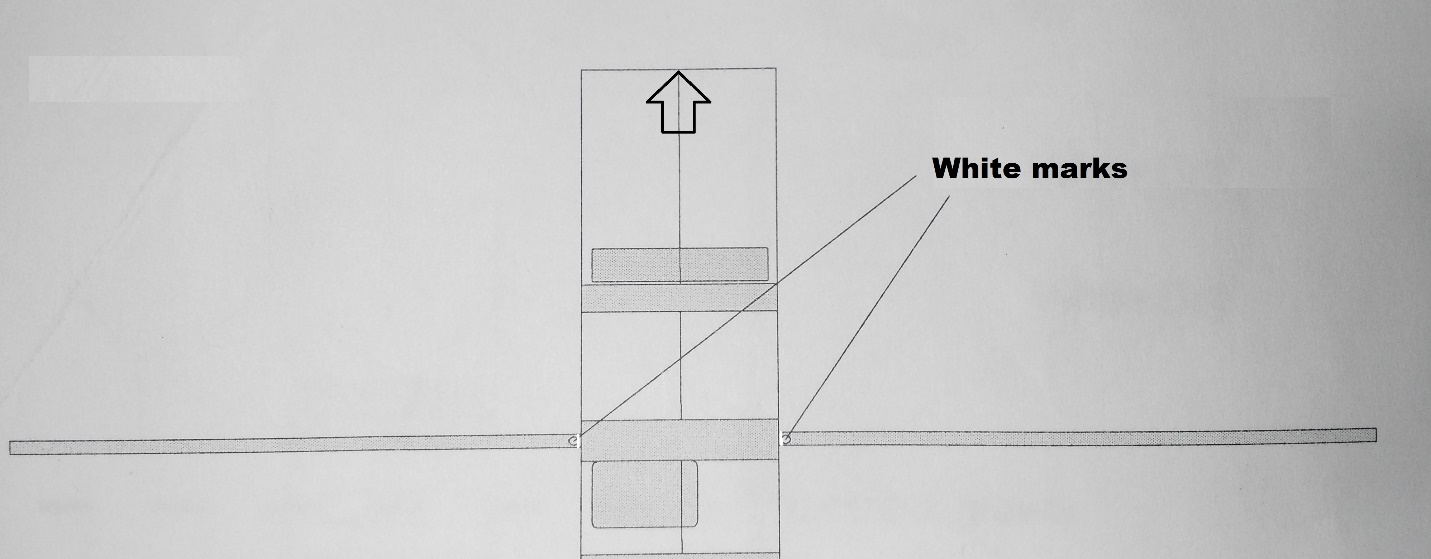
将两根碳管插入机身。

在每根管子上的两个白色标记(红色箭头所示)之间涂抹猩猩胶水。中间的白色标记(蓝色箭头)将放在机身中央,其他标记放在两侧。

将碳管放入机身后,在碳管的其余部分涂上猩猩胶水,然后装上机翼。
机身上有两个孔,用于连接电机和舵机电缆。将电缆穿过这些孔,然后将机翼与机身连接起来。

在机身内使用提供的连接器将刚刚从机翼穿过的信号线连接到电调。电调已连接至电机,并已设置为按正确顺序转动(您需要在稍后步骤中将电调 PDB 连接至电源模块)。

与电调一样,舵机已安装完毕。将信号线从机翼(穿过机身)连接到飞行控制器。

对另一个机翼重复这些步骤。
步骤 3:连接电子设备
该套件包括 Dropix 飞行控制器,其中大部分所需的电子元件都已预先连接(如果使用其他兼容 Pixhawk 的飞行控制器,连接方式也类似)。

有关连接 Dropix 的一般信息,请参阅 Dropix 飞行控制器.
连接电调电源连接器,并将信号线连接至飞行控制器
使用 XT60 连接器将电调连接至电源模块

将信号电缆连接至飞行控制器

电机接线
Dropix 的输出端应使用标准 QuadPlane 配置进行布线(方向如同坐在平面上)。
| 港口 | 连接 |
|---|---|
| MAIN 1 | 右前电机,CCW |
| MAIN 2 | 左后电机,CCW |
| MAIN 3 | 左前电机,CW |
| MAIN 4 | 右后电机,CW |
| 辅助 1 | 左副翼 |
| 辅助 2 | 右副翼 |
| 辅助 3 | 电梯 |
| 辅助 4 | 舵 |
| 辅助 5 | 节流阀 |
飞行控制器连接:电机、舵机、遥控接收器、电流传感器
下图显示了 dropix 飞行控制器的背面,突出显示了用于连接四电机电缆、副翼信号电缆、油门电机的输出引脚,以及电流传感器和接收器 (RC IN) 输入引脚。

连接四电机信号电缆。
在辅助输出端连接副翼电缆和节流阀电机。
将电调的节流阀电机信号线连接到相应的飞行控制器辅助端口。将电调连接至节流阀电机。

连接接收器(RC IN)。
飞行控制器连接:遥测、空速传感器、GPS、蜂鸣器和安全开关
传感器输入、遥测、蜂鸣器和安全开关位于飞行控制器的前端,如下图所示。

如图所示,连接遥测、空速传感器、GPS、蜂鸣器和安全开关。

飞行控制器:连接电源模块和外部 USB
USB 端口、电源模块和外部 USB 的输入端位于飞行控制器的右侧。
如图所示连接电源和 USB

外置 USB 是可选项。如果安装飞行控制器后很难接近 USB 端口,则应使用外置 USB。
安装空气流量计(空速传感器)
皮托管安装在飞机前部,通过一根管子与空速传感器相连。
重要的是,不能有任何东西阻碍气流进入皮托管。这对于固定翼飞行和从四轴飞行器过渡到飞机至关重要。
在飞机前部安装皮托管

固定连接管,确保其不弯曲/扭结。

将管道连接至空速传感器。

安装/连接接收器和遥测模块


GPS/Compass 模块
GPS/Compass 模块已按默认方向安装在机翼上。您不需要为此做任何额外的工作!

安装飞行控制器并调整其方向
将飞行控制器方向设置为 270 度。

使用减震泡沫将控制器固定到位。
步骤 4:最后组装检查
最后的组装步骤是检查载具是否稳定,电机是否安装正确。
检查电机转动方向是否正确(如下图所示)。

必要时,可以使用
PWM_REV中的参数PWM_OUTPUTQGroundControl 组(齿轮选项卡,左侧菜单的最后一项)检查载具是否围绕预期重心保持平衡
用手指按住载具重心,检查载具是否保持稳定。
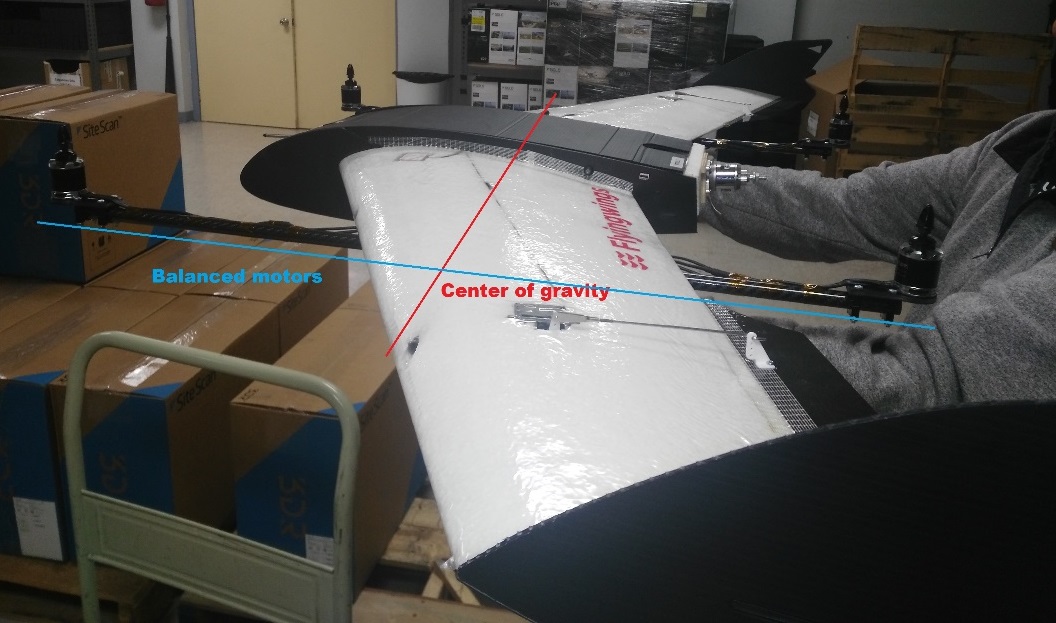
如果载具向前或向后倾斜,请移动电机以保持平衡。
配置
执行正常的 基本配置.
备注
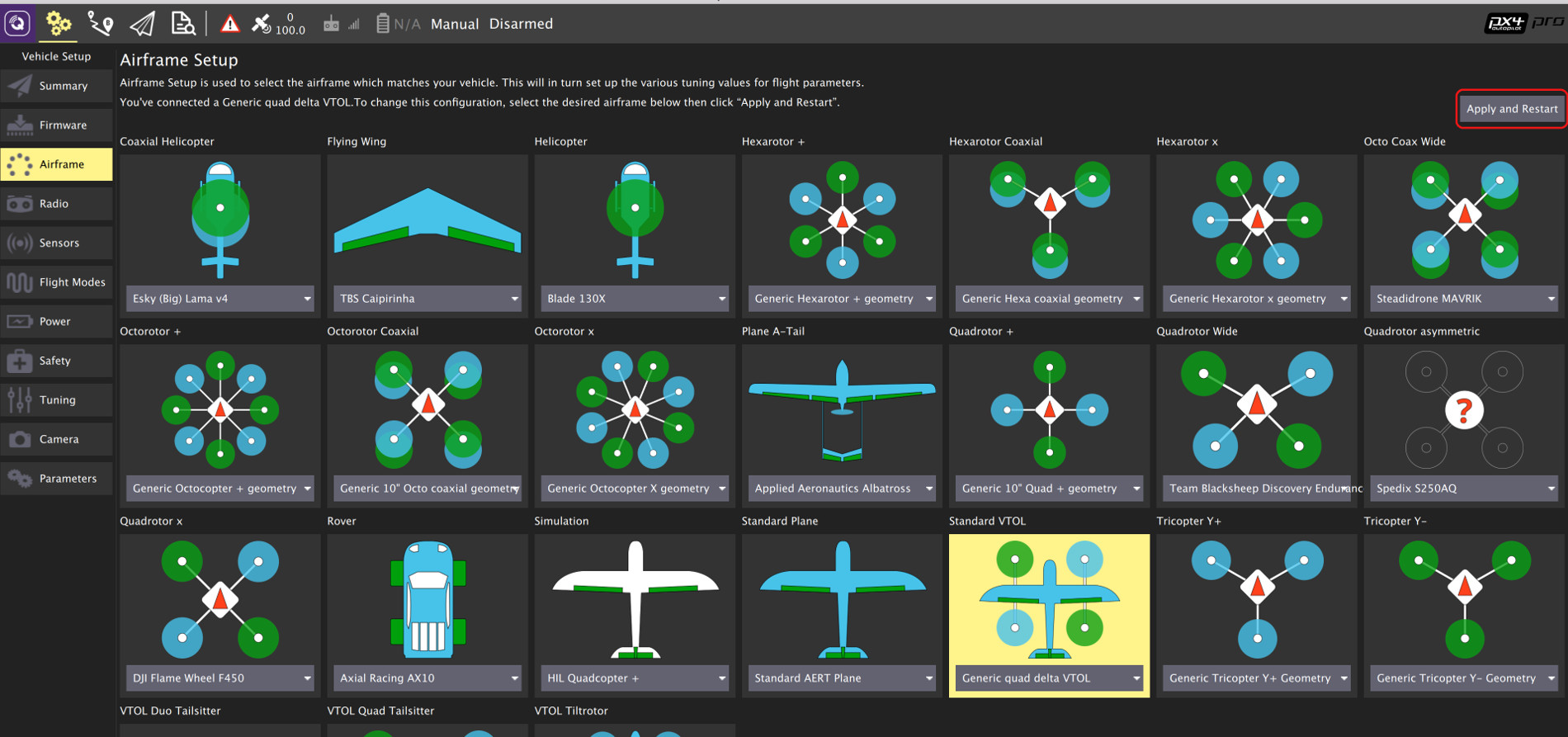
对于 机身 选择载具组/类型为 标准 VTOL 具体载具为 通用四三角洲 VTOL 如下图所示。
设置 自动驾驶仪方向 至
旋转_偏航_270安装自动驾驶仪时 侧面 相对于载具前部。指南针的方向是向前的,因此您可以将其保持在默认值([......])。旋转_无).- 默认参数足以保证稳定飞行。有关更详细的调整信息,请参阅 标准 VTOL 布线和配置.
完成校准后,VTOL 即可飞行。
视频
支持
如果您对 VTOL 改装或配置有任何疑问,请访问 https://discuss.px4.io/c/px4/vtol.