手动/稳定模式(多旋翼飞行器)
 ;
; ;
;
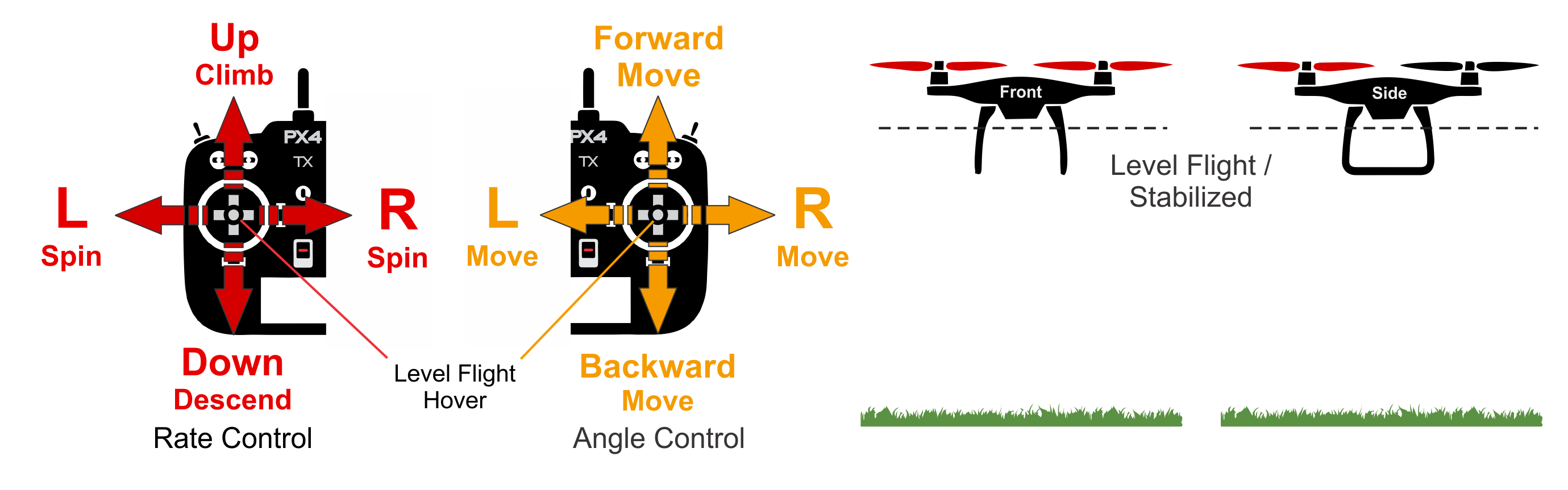
手动/稳定 当遥控杆位于中心位置时,该模式可稳定多旋翼飞行器。若要手动移动/驾驶飞行器,可将摇杆移至中心以外的位置。
如果设置了以下任一选项,多旋翼模式就会启用 手册 或 稳定 模式。
手动控制时,滚动杆和俯仰杆控制 观点 偏航杆控制水平面以上的旋转速度,油门控制高度/速度。
一旦松开控制杆,它们就会回到中心死区。一旦滚动杆和俯仰杆对中,多旋翼飞行器就会平移并停止。然后,飞行器将在原地悬停/保持高度--前提是平衡正确、油门设置适当(见第 4.3 节)。 低于),没有外力作用(如风)。飞行器将随风漂移,您必须控制油门以保持高度。
技术说明
驾驶仪的输入以滚转角、俯仰角指令和偏航率指令的形式传递。油门被重新缩放(见 低于),并直接传递到输出混合器。自动驾驶仪控制姿态,这意味着当遥控杆位于控制器死区的中心时,它会将滚转角和俯仰角调节为零(从而调平姿态)。自动驾驶仪不对风力(或其他因素)造成的漂移进行补偿。
- 需要手动输入(遥控控制器,或通过 MAVLink 使用游戏手柄/拇指摇杆)。
参数
| 参数 | 说明 |
|---|---|
| MPC_THR_HOVER | 悬停节流阀,当节流杆位于中心位置时输出,并且 MPC_THR_CURVE 设置为默认值。 |
| MPC_THR_CURVE | 定义节流比例。默认设置为 重新缩放悬停推力这意味着,当油门杆居中时,将输出配置的悬停油门 (MPC_THR_HOVER),而摇杆输入则在该值以下和以上进行线性调整(允许在稳定控制和高度/位置控制之间平稳过渡)。 在动力强劲的飞行器上,悬停油门可能非常低(例如低于 20%),因此重新缩放会扭曲油门输入,即 80% 的推力将由上半部分的操纵杆输入控制,而 20% 的推力则由下半部分的操纵杆输入控制。如果需要 MPC_THR_CURVE 可设置为 无缩放 这样就不会重新缩放(摇杆输入到节流阀的映射与 MPC_THR_HOVER). |