RTK GPS
实时运动学(RTK) RTK 可将 GNSS/GPS 系统的精度提高到厘米级。RTK 使 PX4 能够应用于精密测量等对精确度要求极高的领域。
您需要
- 一对(支持) RTK GPS 设备 (一个用于地面站的基地和一个用于飞行器的漫游车)。
- A 笔记本电脑/PC 使用 QGroundControl(Android/iOS 版 QGroundControl 不支持 RTK)
- 与笔记本电脑有 WiFi 或遥测无线电连接的载具
QGroundControl 理论上可以为多辆车启用 RTK GPS(前提是每辆车都有一个漫游模块)。在撰写本报告时,尚未对这一用例进行测试。
支持的 RTK 设备
PX4 支持 u-blox M8P, u-blox F9P 和 Trimble MB-Two 全球定位系统和集成该系统的产品。已对以下 RTK 兼容设备进行了测试。
- CUAV C-RTK GPS
- Drotek XL RTK GPS
- Here+ RTK GPS
- Trimble MB-Two
- Freefly RTK GPS (F9P)
- SparkFun GPS-RTK2 板 - ZED-F9P (www.sparkfun.com)
- SIRIUS RTK GNSS ROVER (F9P) (store-drotek.com)
有些 RTK 模块只能用于特定用途(基地或漫游车),而其他 RTK 模块则可以互换使用。
硬件设置
UGV无人车 RTK 模块(载具)
将车载模块连接到飞行控制器的 GPS 端口(方法与其他 GPS 模块相同)。
实际所需的电缆/连接器取决于飞行控制器和所选的 RTK 模块(请参阅 所选设备的文档 了解更多信息)。
基础 RTK 模块(接地)
将基础模块连接至 QGroundControl 通过 USB。使用时不得移动基础模块。
选择一个不需要移动、天空视野开阔、与任何建筑物都相隔较远的位置。通常情况下,使用三脚架或将其安装在屋顶上对抬高 GPS 底座很有帮助。
遥测无线电/WiFi
载具和地面控制笔记本电脑必须通过 wifi 或无线电遥测链路.
链接 必须 使用 MAVLink2 协议,因为它能更有效地利用通道。这应该是默认设置,但如果没有设置,请按照 MAVLink2 配置说明 下图
RTK 连接过程
RTK GPS 连接基本上即插即用:
- 开始 QGroundControl 并通过 USB 将 RTK GPS 基站连接到地面站。设备会自动识别。
启动载具并确保其连接至 QGroundControl.
连接 RTK GPS 设备时,顶部图标栏会显示 RTK GPS 状态图标(除了正常的 GPS 状态图标外)。RTK 正在设置时,图标为红色,RTK GPS 激活后,图标将变为白色。您可以单击图标查看当前状态和 RTK 精度。
QGroundControl 然后启动 RTK 设置过程(称为"Survey-In")。
勘测-输入是一个启动程序,用于获取基站的准确位置估计值。该过程通常需要几分钟(在达到基站位置信息中指定的最短时间和精度后结束)。 RTK 设置).
您可以点击 RTK GPS 状态图标跟踪进度。

完成 "调查-输入 "后:
RTK GPS 图标变为白色,并且 QGroundControl 开始向载具发送位置数据流:

载具 GPS 将切换到 RTK 模式。新模式显示在 正常 GPS 状态图标 (
3D RTK GPS 锁定):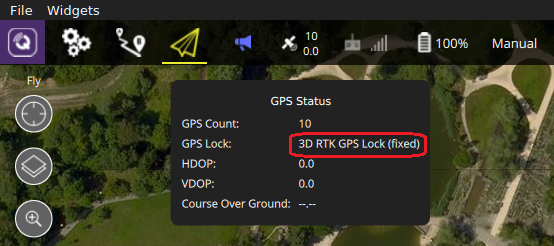
可选 PX4 配置
可能需要更改以下设置(使用 QGroundControl).
RTK GPS 设置
RTK GPS 设置在 QGroundControl 常规设置 (设置查看> 常规设置> RTK GPS).
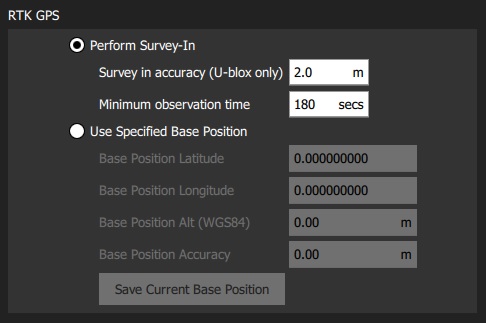
这些设置定义了完成 RTK GPS 设置过程(称为 "Survey-In")的最短持续时间和最低精度。
您可以保存并重复使用基准位置,以节省时间:执行一次 "调查-输入",选择 使用指定基准位置 并按下 保存当前基准位置 来复制上次调查的值。然后,这些值将在 QGC 重启后一直存在,直到被更改。
MAVLink2
必须使用 MAVLink2 协议,因为它能更有效地利用低带宽通道。在最近的版本中,默认情况下应启用该协议。
确保使用 MAVLink2:
- 将遥测模块固件更新到最新版本(参见 QGroundControl > 设置 > 固件).
- 设置 MAV_PROTO_VER 至 2(见 QGroundControl 设置 > 参数)
调音
您可能还需要调整一些参数,因为默认参数是在假设 GPS 精确度为米而不是厘米的情况下调整的。例如,您可以降低 ekf2_gps_v_noise 和 ekf2_gps_p_noise 到 0.2。
使用 RTK GPS 进行偏航
某些 RTK GPS 设备(即有多个天线的设备)可以输出偏航角,用来代替磁罗盘的航向。要启用此功能,请设置 EKF2_AID_MASK 为 1(在参数值上添加 128)。
双接收器
第二个 GPS 接收机可用作备份(RTK 或非 RTK)。参见 EKF2 GPS 配置 节。
载具设置示例
机身制造主题 DJI Flamewheel 450 配有距离传感器和 RTK GPS 描述了使用 Here+ RTK GPS 和 Pixhawk 3 Pro 的机身设置。