英特尔 Aero 可飞行无人机
该飞行控制器已 停产 目前已不再在市场上销售。
英特尔 Aero 可飞行无人机®是一个无人机开发平台。其中一部分是 英特尔 Aero 计算板其中一部分是在四核 CPU 上运行 Linux。另一部分是与之相连的 STM32 微控制器,在 NuttX 上运行 PX4。这些都集成在同一封装中,安装在 英特尔 Aero 可飞行无人机其中还包括视觉配件包。

导言
有关 官方维基 说明了如何设置、更新和连接电路板,以及如何在 Linux 端进行开发。本主题中的说明主要介绍如何从开发树更新微控制器上的固件。
重要的是要更新到最新的映像,因为不同版本之间的某些指令会有变化。您可以通过连接主板并运行以下命令来检查 BIOS 和发行版的版本:
get_aero_version.py
这里的说明是用以下版本测试的:
BIOS_VERSION = Aero-01.00.13 OS_VERSION = Poky Aero (Intel Aero Linux Distro) 1.5.1-dev (pyro)" AIRMAP_VERSION = 1.8 FPGA_VERSION = 0xc1
使用 Ubuntu 设置英特尔 Aero
要在 Intel Aero 上安装 Ubuntu,需要以下设备:
- 电源(电池或网线)
- 微型 HDMI 转 HDMI 连接线,用于连接显示器
- Micro USB3 转 USB2 母头适配器
- 用于连接鼠标和键盘的 USB 集线器
按照以下链接的说明进行操作 英特尔 Aero wiki > 在英特尔 Aero 上安装 Ubuntu:
一旦下列步骤完成 英特尔航空存储库 (以上)完成后,Aero 内核就安装好了。从现在起,始终使用该内核启动。
按照说明闪存 BIOS、FPGA 和飞行控制器。打开 MAVLink 路由器配置文件: /etc/mavlink-router/main.conf
在配置文件中添加以下几行,将笔记本电脑 IP 作为 UDP 端点。IP 地址必须设置为笔记本电脑的 IP 地址。要查找笔记本电脑的 IP 地址,请执行 ifconfig.
[UdpEndpoint wifi] 模式 = 正常 地址 = 192.168.8.255
完成所有这些步骤后,无人机应该会自动连接到 QGroundControl 在笔记本电脑上运行。
接下来安装 ROS,方法如下 此处的说明.
RealSense 摄像头
RealSense SDK
按照下列步骤安装 RealSense SDK 航空维基.克隆版本库时,R200 型号需要使用传统分支。如果使用的是 D435 或 D415,则需要克隆主分支。所有其他步骤都是一样的,如果相机发生变化,可以来回切换分支。
如果使用 RealSense R200,则可以通过 ROS 节点启动它:
roslaunch realsense_camera r200_nodelet_default.launch如果使用的是任何 D400 系列摄像机,请按照下一步安装不同的 ROS 封装程序。
用于 D400 系列 RealSense 的 ROS 包装器
请按照 从源代码安装英特尔 RealSense ROS 来安装一个 catkin 工作区并克隆 RealSense 软件。
使用
sudo cp config/99-realsense-libusb.rules /etc/udev/rules.d/ sudo udevadm control --reload-rules && udevadm trigger现在,可以通过 ROS 节点启动 RealSense:
roslaunch realsense2_camera rs_camera.launch
避开障碍物
要运行 PX4 避障软件,请先安装 catkin:
apt install python-catkin-tools
创建一个 catkin 工作空间并初始化。然后将回避库克隆到源空间,或使用符号链接到源空间。编译软件包并启动 ROS 节点:
catkin build local_planner roslaunch local_planner local_planner_aero.launch
更新 PX4 软件
设置 PX4 开发环境后,按照以下步骤更新 PX4 软件:
- 对载具上的所有软件进行全面更新 (https://github.com/intel-aero/meta-intel-aero/wiki/Upgrade-To-Latest-Software-Release)
- 抓住 固件
- 编译时使用
make intel_aerofc-v1_default 配置目标主机名
如果您的系统能解析链接本地名称,您就不需要做任何事情,可以跳过这一步。您可以通过尝试 ssh 进入
intel-aero.local通过 WiFi 或 USB 连接到它之后:ssh [email protected]如果还不行,您可以尝试提供上传脚本将使用的 IP 地址:
# WiFi IP export AERO_HOSTNAME=192.168.8.1 # Ethernet-over-USB IP export AERO_HOSTNAME=192.168.7.2一起上传:
使 intel_aerofc-v1_default 上传
通过网络连接 QGroundControl
- 确保使用 WiFi 或 USB 网络连接到电路板
- 通过 SSH 连接到电路板,并确保 MAVLink 转发程序运行。默认情况下,它会在启动时自动启动。也可以通过以下方式手动启动
systemctl start mavlink-router - 开始 QGroundControl 就会自动连接。
- 而不是开始 QGroundControl您可以打开 MAVLink 外壳 使用脚本:
./Tools/mavlink_shell.py 0.0.0.0:14550
连接 LeddarOne 测距仪
连接 LeddarOne 到 Aero 遥测端口。LeddarOne 和 Aero 遥测端口 (TELEM1) 的引脚分配如下。
| 针脚 | Aerofc 电话 | LeddarOne |
|---|---|---|
| 1 | VCC | 接地 |
| 2 | 德克萨斯州 | - |
| 3 | RX | VCC |
| 4 | SCL | RX |
| 5 | SDA | 德克萨斯州 |
| 6 | 接地 | - |
要启用测距仪,设置 sens_leddar1_cfg 将参数设置为 TELEM1 并重新启动电路板(参数设置说明 可在此查阅).
连接激光雷达测距仪
不建议将激光雷达 Lite 与以下设备一起使用 英特尔 Aero 可飞行无人机®由于测量尖峰。
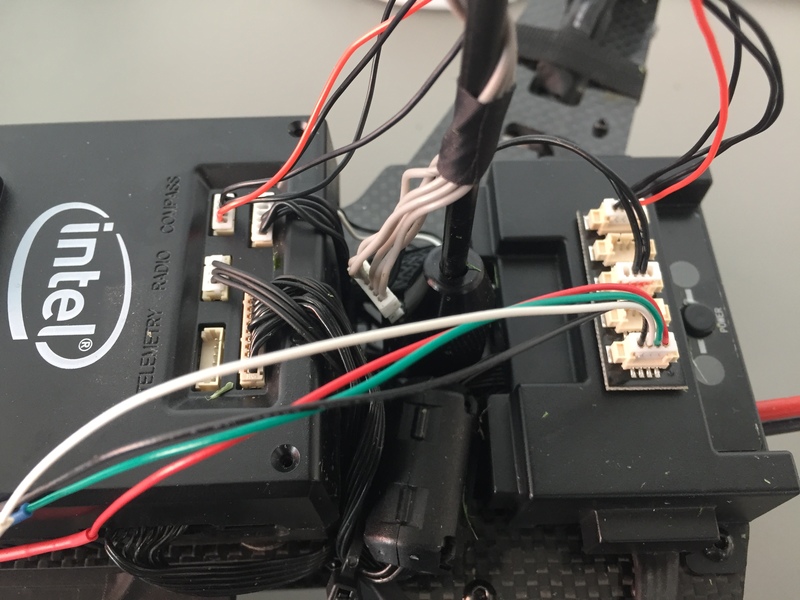
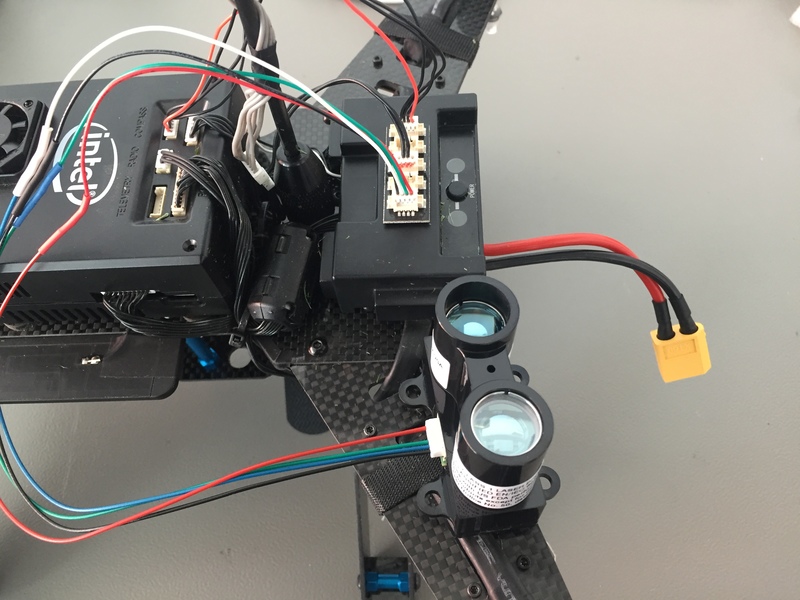
以下说明适用于 激光雷达精简版 V3 通过 I2C 连接。Intel® Aero Ready to Fly 无人机有两个 I2C 端口:一个名为 COMPASS,另一个名为 TELEMETRY。这两个端口的引脚分配如下。我们建议使用 TELEMETRY 端口,因为它没有被使用。如果 TELEMETRY 端口已被占用,可使用分流器共享 I2C 连接(适用于任何 I2C 端口)。请查看下面的分流器设置图片。
此外,建议在激光雷达 Lite I2C 连接中使用电解电容,以减少距离读数中的尖峰(参见 "电解电容")。 这里 第 3 页)。
Lidar Lite V3 和 Aero 遥测端口的引脚分配如下
| 针脚 | Aerofc 电话 | 激光雷达精简版 V3 |
|---|---|---|
| 1 | VCC | VCC |
| 2 | 德克萨斯州 | - |
| 3 | RX | - |
| 4 | SCL | SCL |
| 5 | SDA | SDA |
| 6 | 接地 | 接地 |
| 针脚 | Aerofc COMPASS | 激光雷达精简版 V3 |
|---|---|---|
| 1 | VCC | VCC |
| 2 | SCL | - |
| 3 | SDA | - |
| 4 | 接地 | SCL |
| 5 | - | SDA |
| 6 | - | 接地 |
在 Aero 上使用光流
英特尔 Aero 可飞行无人机计算板上预装了光流二进制程序(Linux 操作系统版本 1.6 或更高),使其能够根据光流速度估算进行稳定飞行。要使用光流,必须先安装测距传感器(见上文)。
要使用光流,请在载具计算板的控制台中运行以下命令:
systemctl start aero-optical-flow
如果要在启动时启动光流二进制文件,请使用
systemctl enable aero-optical-flow # 使用 disable 撤销
此外,还应在飞行控制器中设置以下参数值。
| 参数 | 价值 |
|---|---|
| EKF2_AID_MASK | 2 |
| EKF2_HGT_MODE | 2 |