飞行终端配置
航班终止 故障保护动作 可由 安全检查 (如在任何类型的飞行器上或在任何飞行模式下发生遥控丢失、违反地理围栏等),或由 故障探测器.
何时 航班终止 激活后,PX4 会同时关闭所有控制器,并将所有 PWM 输出设置为故障安全值。
根据所连接的设备,PWM 故障安全输出可用于
- 部署一个 跳伞.
- 伸出可伸缩起落架。
- 将 PWM 连接的云台移至安全方位(或缩回),以保护相机。
- 触发类似安全气囊的充气装置。
- 触发警报。
飞行终止后无法恢复。触发后应尽快拔下电池。您需要重新启动飞行器/对其进行电源循环,然后才能再次使用。
PX4 不知道连接了哪些安全设备,它只是将一组预定义的 PWM 值应用于输出。
故障安全值在终止时应用于所有输出。无法对电机或特定安全装置配置独立的基于时间(或其他)的触发。
这是 不 独立 飞行终止系统.如果断电或自动驾驶仪完全崩溃,将不会触发失效保护装置。
硬件配置
任何 安全装置 (例如 跳伞可以使用可通过改变 PWM 值触发的 PWM 端口(包括主端口和辅助端口),并可连接到任何空闲的 PWM 端口。)
如果您使用的是 Pixhawk 系列电路板,则必须单独为伺服轨供电(即通过 5V BEC 供电,通常也可通过电调供电)。
软件配置
安全 主题介绍了如何设置 飞行终止 作为 故障保护动作 进行特定的故障安全检查。
故障探测器 还可以(选择性地)配置为在飞行器翻转(超过一定姿态)或外部自动触发系统(ATS)检测到故障时触发飞行终止:
- 通过设置 cbrk_flightterm=0.
- 安全> 故障检测器> 姿态触发器 解释了如何配置姿态限制以触发 航班终止.
期间 起飞 过多的情感会引发 关厂 (杀死发动机,但不发射降落伞),而不是终止飞行。无论
cbrk_flightterm. - 安全 > 外部自动触发系统 (ATS) 说明了如何配置外部触发系统。
对于连接有安全装置的每个 MAIN 输出端(其中"n"是 PWM 端口编号),设置为:"n":
- PWM_MAIN_DISn 设备的 PWM 值。
- PWM_MAIN_FAILn 设备的 PWM 值。
对于连接有安全装置的每个 AUX 输出端,其中 "n" 是 PWM 端口编号,请设置:
- PWM_AUX_DIS1 设备的 PWM 值。
- PWM_AUX_FAILn 设备的 PWM 值。
最后,设置 PWM_AUX_FAILn 和 PWM_MAIN_FAILn 任何电机的 PWM 值。
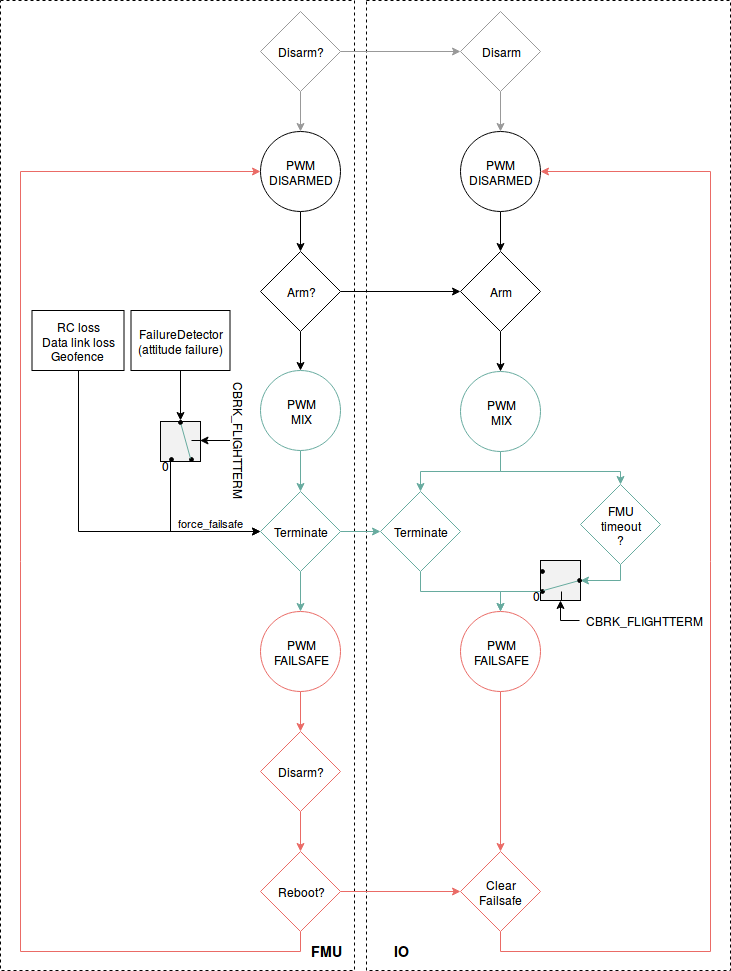
逻辑图
下图显示了围绕飞行终止的逻辑流程。