竞赛设置
本页介绍如何设置和配置竞赛以获得最佳性能(特别是对于 Acro 模式).
请记住,竞赛是一种速度极快的交通工具,专门为超载而设计!你应该已经有了一些经验,或者让有经验的人来帮助你。
这里介绍的许多内容也可用于提高其他类型多旋翼飞行器的飞行性能。
竞赛手通常会省略一些传感器(如 GPS)。因此,可用的故障安全选项较少。
建造选项
竞赛手通常会省略一些传感器。
最低配置是只使用陀螺仪和加速度传感器。
如果电路板有内部磁力计,则不应使用(小型竞赛特别容易受到强电磁干扰)。
竞赛手通常不使用 GPS,因为它会增加一些重量,而且在撞车时容易损坏(GPS + 外部磁力计必须放置在 GPS 杆上,远离大电流,以避免磁场干扰,不幸的是,这意味着它很容易损坏)。
不过,加装 GPS 也有一些好处,尤其是对初学者而言:
- 您可以进入位置保持状态,载具就会停留在一个地方。这在你迷失方向或需要刹车时非常方便。它还可以用来安全着陆。
- 返回模式 可用作开关或 RC 丢失/电池电量不足故障保护装置。
- 当它崩溃时,你将占据最后一个位置。
- 日志中包含飞行轨迹,这意味着您可以回顾飞行过程(3D)。这有助于提高您的杂技表演技能。
在激烈的杂技表演中,GPS 可能会在短时间内失去其定位。如果您在此期间切换到位置模式,则将使用高度模式,直到位置再次有效。
硬件设置
以下段落介绍了制造载具时的几个要点。如果您需要完整的制造说明,可以按照 QAV-R 5" KISS 电调竞赛 生成日志。
振动设置
有多种安装方法可以减少振动。例如,可以在飞行控制器上安装减震泡沫,或使用 O 形圈.
虽然没有唯一的最佳方法,但如果使用高质量的部件(机架、电机、螺旋桨),通常会减少振动问题。 QAV-R 5" KISS 电调竞赛.
确保使用 平衡螺旋桨.
重心
确保重心尽可能靠近推力中心。左右平衡通常不成问题,但前后平衡可能会有问题。您可以移动电池直到正确为止,并在机架上做好标记,这样您就可以始终正确地放置电池。
积分项可以考虑不平衡的设置,而定制混合器可以做得更好。不过,最好还是将任何不平衡作为载具设置的一部分来解决。
电机订购
如果您计划使用四合一电子调速器,例如 好盈 XRotor Micro 40A 4in1您会发现,它使用的电机排序与 PX4 使用的电机排序不同。PX4 允许您通过以下方式在软件中更改电机排序 订购 参数。您可以选择通常用于这些 4 合 1 ESC 的 Betaflight/Cleanflight 电机订购。
软件设置
制作好竞赛后,您需要对软件进行配置。通过 基本配置指南 并选择 通用 250 竞赛 机身已经设置了一些竞赛专用参数。
这些参数非常重要:
- 通过设置 PWM_RATE 为 0。
- 根据需要设置手动/稳定模式的最大滚动率、俯仰率和偏航率: 最大滚动率, mc_pitchrate_max 和 MC_YAWRATE_MAX.最大倾斜角度用 mpc_man_tilt_max.
- 最小推力 MPC_MANTHR_MIN 应设置为 0。
- 通过设置 RC_FLT_CUTOFF 为 0。
估算器
如果您使用 GPS,可以跳过这一部分,使用默认估计器。否则,您应该改用 Q 姿态估算器,它可以在没有磁力计或气压计的情况下工作。
要选择它,请设置 sys_mc_est_group 为 1,并更改以下参数:
- 设置 SYS_HAS_MAG 如果系统没有磁力计,则设为 0。
- 设置 SYS_HAS_BARO 如果系统没有气压计,则设为 0。
- 配置 Q 估计器:设置 ATT_ACC_COMP 为 0、 ATT_W_ACC 至 0.4,以及 att_w_gyro_bias 如果您愿意,可以稍后对其进行调整。
故障安全
配置 RC 丢失和低电量故障保护.如果不使用 GPS,请将故障保护设置为 封锁关闭电机。在不连接道具的情况下,在工作台上测试遥控损耗,方法是在载具启动时关闭遥控器。
PID 调节
在进行任何调整之前,请务必校准电调。
此时,您应该可以进行首次试飞了。
如果进展顺利,则对 PID 调节 (忽略推力曲线设置)。飞行器需要 不协调这意味着 P 和 D 增益应设置得过低,这样控制器就不会产生可被理解为噪音的振荡(默认增益可能就足够了)。这对 过滤 调整。稍后将进行第二轮 PID 调整。
控制延迟
控制滞迟时长 是指从载具受到物理干扰到电机对变化做出反应的延迟时间。
它是 至关重要 尽可能减少控制延迟 —;延迟越低,速度越快 P 这意味着更好的飞行性能。即使延迟增加一毫秒,也会产生不同的效果。
这些都是影响延迟的因素:
- 软机身或软振动安装会增加延迟(它们起到过滤作用)。
- 软件和传感器芯片上的低通滤波器以增加的延迟换取噪声过滤的改进。
- PX4 软件内部结构:传感器信号需要在驱动器中读取,然后通过控制器到达输出驱动器。
- 与使用 AUX 引脚相比,IO 芯片(MAIN 引脚)增加了大约 5.4 毫秒的延迟(这不适用于 Pixracer 或 总括 F4但确实适用于 Pixhawk)。要避免输入输出延迟,请禁用 SYS_USE_IO 并将电机连接到 AUX 引脚上。
- PWM 输出信号:启用单次拍摄以减少延迟 (PWM_RATE=0)
过滤器
如上一节所述,滤波器会影响控制延迟。
这是 PX4 中控制器的过滤管道:
- 用于陀螺仪传感器的片上 DLPF。截止频率设置为 98Hz,采样频率为 1kHz。
- 陀螺仪传感器数据的低通滤波器。它可以通过 imu_gyro_cutoff 参数。
- D 项上有一个独立的低通滤波器。D 项最容易受到噪声的影响,而稍稍增加的延迟不会对性能产生负面影响。因此,D 端有一个可单独配置的低通滤波器、 imu_dgyro_cutoff.
- 在电机输出端 (MOT_SLEW_MAX).一般不使用。
为了减少控制延迟,我们希望提高低通滤波器的截止频率。但这需要权衡利弊,因为这也会增加馈送至电机的信号噪音。电机上的噪声会产生以下后果:
- 电机和电调可能会发热,以至于损坏。
- 由于电机不断改变速度,飞行时间缩短。
- 明显的随机小抽搐。
最佳过滤器设置取决于载具。默认设置比较保守,因此也适用于质量较差的设置。
滤波器调整参数
首先确保已激活高速率日志记录配置文件 (SDLOG_PROFILE 参数)。 飞行回顾 然后将显示滚动、俯仰和偏航控制的 FFT 图。
不要试图用滤清器调校来解决载具振动大的问题。而是要修复载具的硬件设置。
过滤器的调整最好通过查看飞行日志来完成。您可以使用不同的参数进行多次飞行,然后检查所有日志,但要确保在两次飞行之间撤膛,以便创建单独的日志文件。
执行的飞行动作可以是简单地悬停在 手动/稳定模式 有一些向各个方向的滚动和俯仰,有一些加大油门的时间。总时间不需要超过 30 秒。为了更好地进行比较,所有测试中的动作都应相似。
首先调整陀螺滤波器 imu_gyro_cutoff 在使用低 D 项滤波器值 (imu_dgyro_cutoff = 30).
将日志上传到 https://logs.px4.io 并比较 执行器控制 FFT 情节。将截止频率设置为噪声开始明显增加之前的某个值(频率在 60 赫兹左右或以上)。然后调整 D 项滤波器 (imu_dgyro_cutoff) 的方式相同。
下面是三个不同滤波器值(40Hz、70Hz、90Hz)的示例。在 90Hz 时,总体噪音水平开始上升(尤其是滚音),因此 70Hz 的截止频率是一个安全的设置。
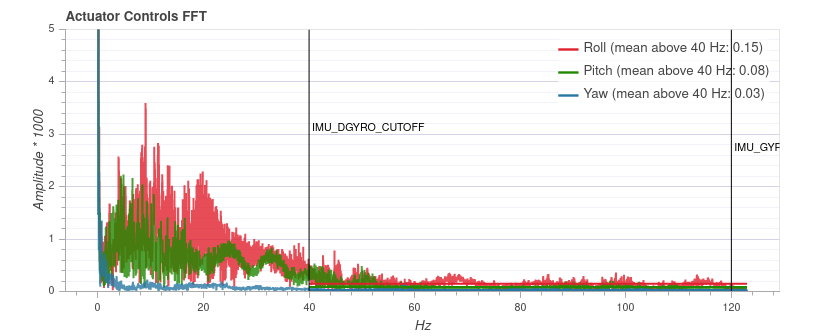
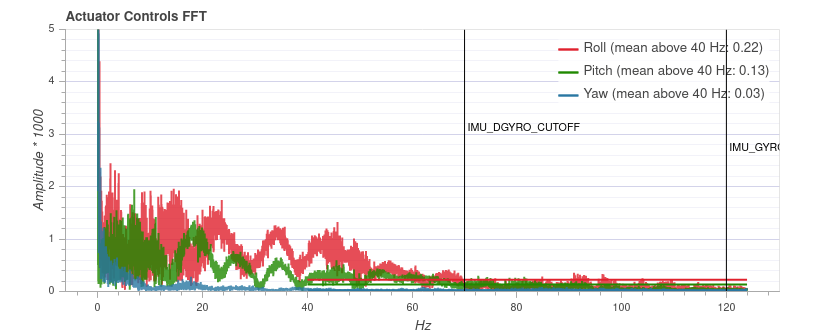
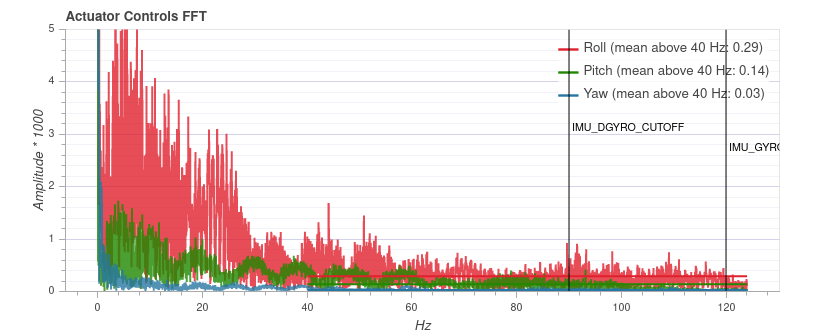
由于 y 轴刻度可能不同,因此无法在不同飞行器之间进行比较。但在同一飞行器上,它是一致的,与飞行时间无关。
PID 调节(第二轮)
现在进行第二轮 PID 调整,这一次要尽可能紧凑,还要调整推力曲线。
Airmode
在验证载具在小油门和大油门下飞行良好后,您可以启用 空气模式 与 MC_AIRMODE 参数。该功能可确保载具在小油门时仍可控制并跟踪速率。
翻阅愉快 :)