定位模式(多旋翼飞行器)
 ;
; ;
;")
定位(POSITION) 是一种易于飞行的遥控模式,其中滚动杆和俯仰杆控制左右和前后方向(相对于飞行器前方)的飞行速度,油门控制上升和下降速度。释放/对中摇杆时,飞行器将主动制动、调平并锁定在三轴空间中的某个位置上,并对风力和其他力量进行补偿。
对于新手来说,定位模式是最安全的手动模式。与 海拔高度 和 手动/稳定 在这种模式下,当摇杆居中时,载具就会停止,而不会继续行驶,直到受到风阻而减速。
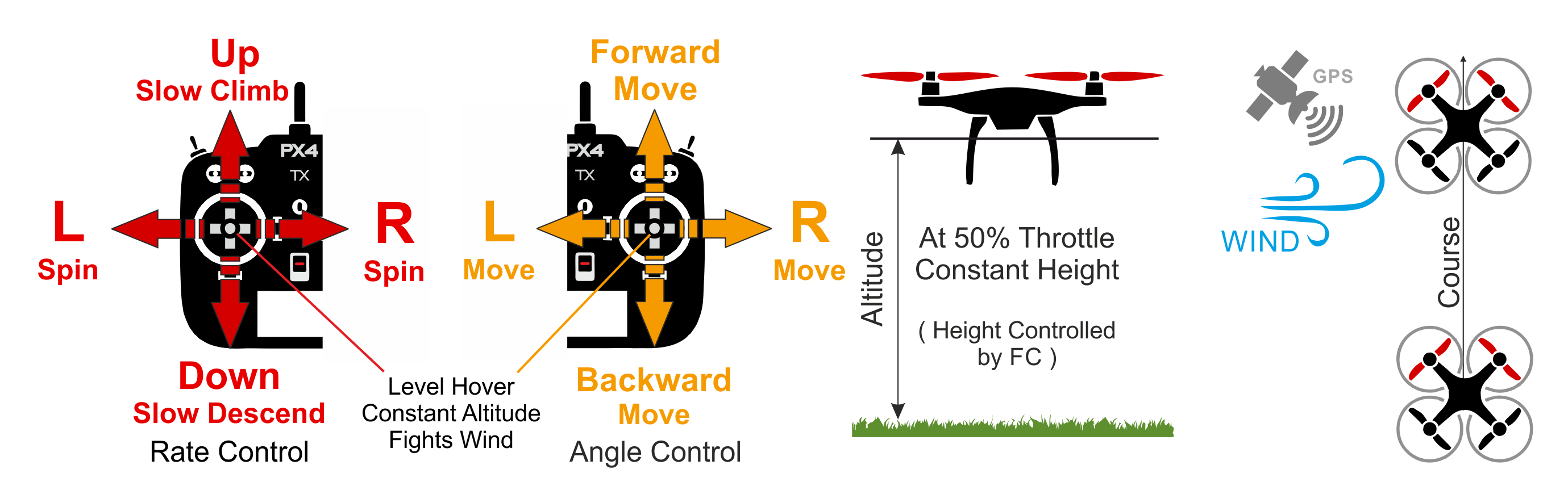
下图直观地显示了模式行为(模式 2 发射机)。
在此模式下着陆时必须小心谨慎。首次在此模式下着陆时,应随时准备切换到 手动/稳定 才能解除。如果正确检测到着陆,则在着陆后电机会减速,然后很快解除。如果电机继续以较高转速旋转或开始旋转,首先切换到 手动/稳定 (MC)然后解除。请注意,由于 GPS 漂移,载具可能会在地面上翻倒。
技术摘要
RC/ 手动模式,由 RPT 控制杆控制 速度 在相应的方向。用中心杆将载具调平,并逆风保持固定位置和高度。
- 居中的 RPT 摇杆(在遥控死区)在任何风力下都能保持稳定的 x、y、z 位置和水平姿态。
- 外围中心:
- 滚动杆/俯仰杆分别控制相对于载具前方的左右方向和前后方向的速度。
- 油门杆控制上升-下降速度。
- 偏航杆控制水平面以上的角旋转率。
- 起飞
- 着陆时,如果油门杆升至超过 62.5%(从底部开始的全范围),载具就会起飞。
- 着陆
- 靠近地面时 (MPC_LAND_ALT2),水平速度受到限制 (MPC_LAND_VEL_XY).
- 需要手动输入(遥控控制器,或通过 MAVLink 使用游戏手柄/拇指摇杆)。
- 该模式需要 GPS。
参数
中的所有参数 多旋翼定位控制 这些参数是相关的。下面列出了几个特别值得注意的参数。
| 参数 | 说明 |
|---|---|
| MPC_HOLD_DZ | 启用位置保持的摇杆死区。默认值:0.1(全摇杆范围的 10%)。 |
| mpc_z_vel_max_up | 最大垂直上升速度。默认值:3 m/s。 |
| mpc_z_vel_max_dn | 最大垂直下降速度。默认值:1 m/s。 |
| MPC_LAND_VEL_XY | 接近地面时的水平速度限制 (MPC_LAND_ALT2 米,如果不知道与地面的距离,则为地面以上)。默认值:2 米/秒。 |
| MPC_LAND_ALT1 | 触发慢速着陆第一阶段的高度。影响最大允许水平速度设定点。默认为 5 米。 |
| MPC_LAND_ALT2 | 慢速着陆第二阶段的高度。在这一阶段,最大水平速度限制为 MPC_LAND_VEL_XY.默认 2 米。 |
RCX_DZ |
通道 X 的 RC 死区。 rc_map_throttle.例如,如果节流阀是通道 4,那么 RC4_DZ 指定死区。 |
MPC_XXXX |
大多数 MPC_xxx 参数都会影响该模式下的飞行行为(至少在一定程度上)。例如 MPC_THR_HOVER 定义载具悬停时的推力。 |