骁龙硬件设置示例
高通骁龙飞行器 已停用(已被取代,但 PX4 尚不支持更新版本)。本文档是为现有用户提供的,但将在未来版本中删除。
本指南展示了 Lumenier QAV-R 250 机架的构造,其中包括 高通骁龙飞行器 以及定制的硬件支架。该装置使用传统的 PWM 电调电路板,因此需要使用 Atlflight_eagle_default 制作目标(见说明 这里).
PX4 开发团队已构建、测试并记录了这一特定设置。

组件
- 飞行控制器: 骁龙飞行
- 立体视觉附加组件 (可在此查阅)
- 框架 流明 QAV-R 250
- ESC: 好盈 4in1 40A
- 发动机 流明 RX2206 2350KV
- 接收器 Spektrum RC FPV 竞赛串行接收器
- Wi-Fi 天线: 莱尔德多波段
- GPS 模块(可选): mRo GPS + 指南针模块
- 距离传感器(可选): TeraRanger One
- 距离传感器适配器(仅在使用 TeraRanger 时需要): I2C 适配器
- 定制印刷部件: 支脚,安装支架

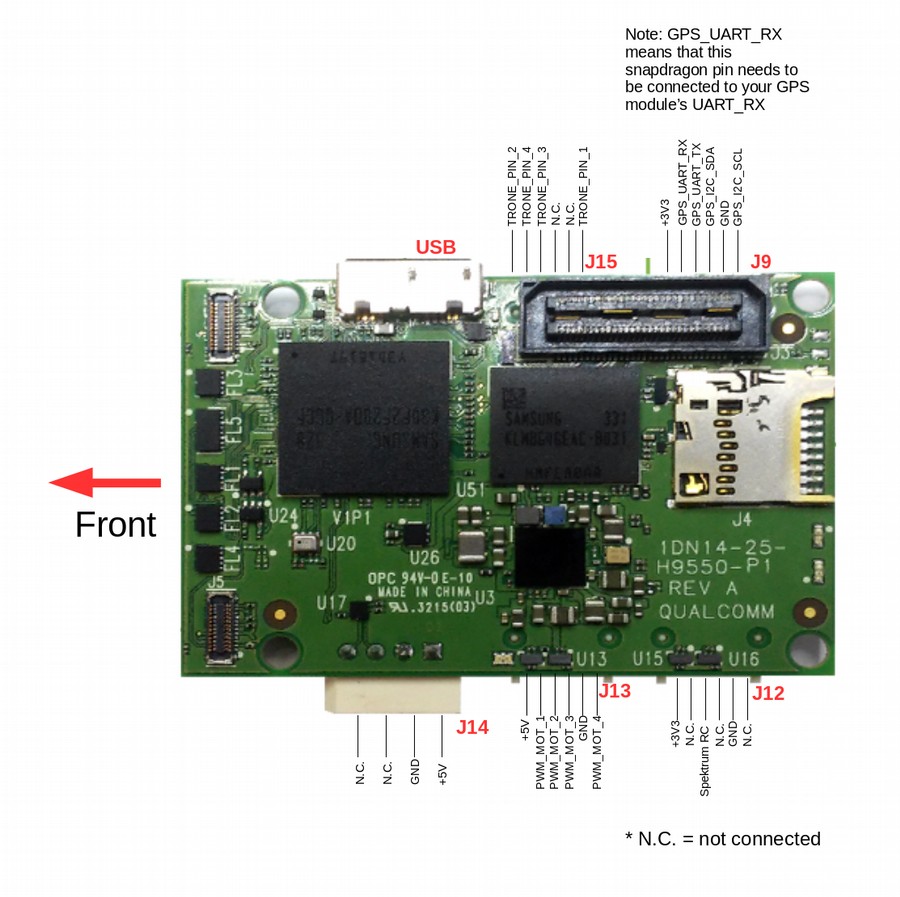
布线
虽然 Snapdragon 使用的是 DF13 连接器,但是 引脚 与 Pixhawk 不同。
搭建框架
Lumenier QAV-R250 可以正常组装,无需考虑用于安装 FPV 摄像机的侧板。为了将电机与定制打印的支腿一起安装,您需要使用比电机附带的螺丝更长的螺丝。普通的 M3x10mm 螺丝即可。
Snapdragon 非常容易受到框架振动的影响。确保拧紧所有螺丝,但不要拧得太紧,以免损坏另一端塑料螺母中的绕组。
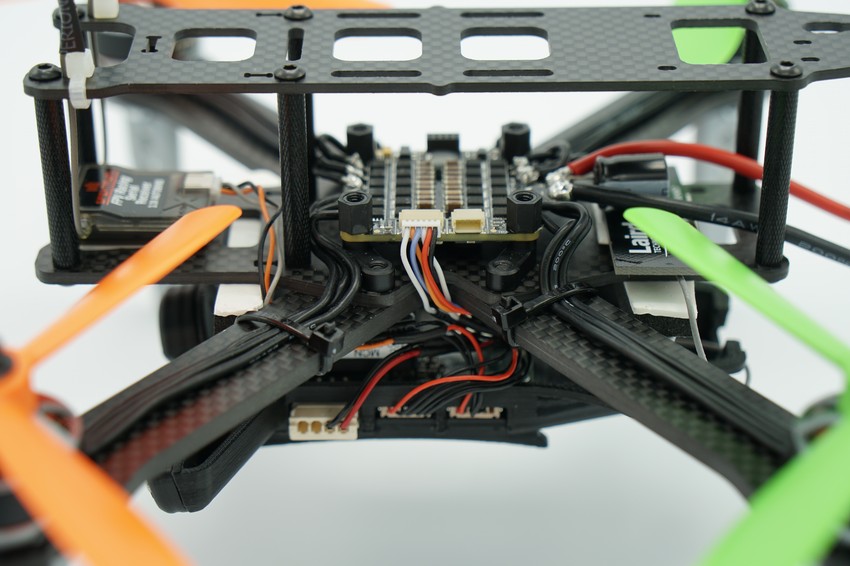
如下图所示,Hobbywing 4in1 ESC 可以整齐地安装在机架上。

要将 Snapdragon Flight 安装到框架上,首先要将其移植到立体视觉附加组件的安装板上。这项工作相当精细,确保从旧塑料外壳中取出相机时不会损坏相机。我们建议在此步骤中安装 WiFi 天线和 uFL 连接器,因为一旦 Snapdragon 安装到新外壳中,就很难安装了。
我们正在使用立体视觉附加组件,因为它更容易安装到 QAV-250 上,而且我们将来可能会使用立体视觉。不过,目前立体功能尚未启用。
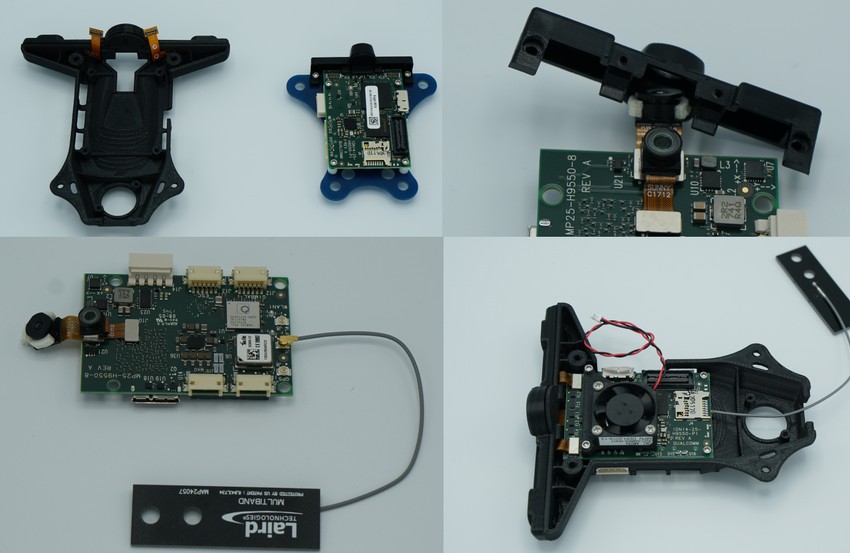
将 Snapdragon 安装到新外壳上后,用 Lumenier 框架上的备用 M3 螺丝拧上两个定制的印刷支架。再次提醒,由于是将金属螺丝拧入塑料中,因此不要拧得太紧,以免损坏塑料,使螺丝失去牵引力。
最后,用双面胶将支架固定在车架上。我们在碳纤维框架和立体视像部分的定制安装支架之间使用了两条减震泡沫,取得了最佳效果。从随 QAV-R 框架提供的一块泡沫中剪下两条,效果很好。
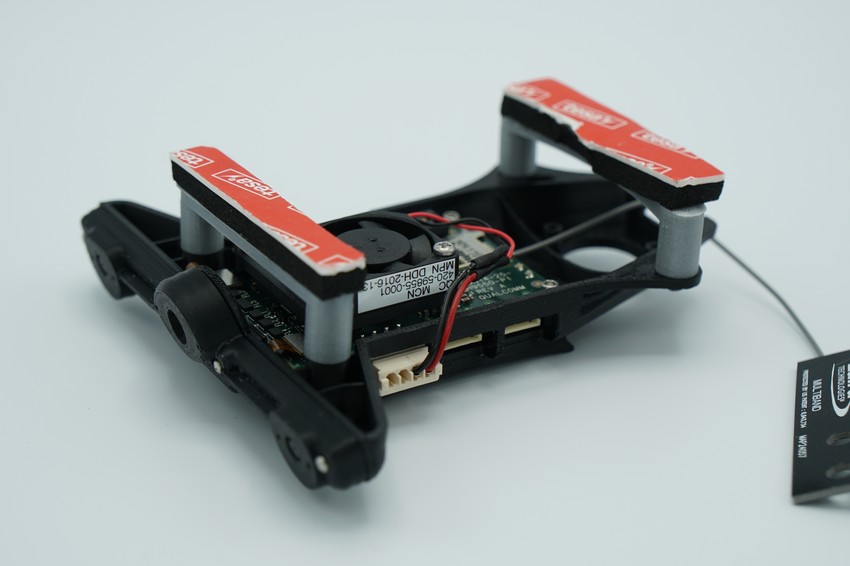
您可以额外安装 GPS 模块和 TeraRanger 模块,但正常的基于 VIO 的飞行并不需要它们。有关测距仪的更多信息,请参见 这里.现在您可以将 Snapdragon 模块安装到 QAV 框架上,并连接电调和接收器。