ModalAI 飞行核心 v1
模态AI 飞行核心 v1 (数据表)是用于 PX4 的飞行控制器,美国制造。Flight Core 可与 ModalAI VOXL (数据表)进行避障和 GPS 导航,或作为独立的飞行控制器单独使用。
飞行核心部分与 PX4 飞行控制器部分完全相同。 VOXL 航班 (数据表),它将 VOXL 配套计算机和飞行核心集成到一块印刷电路板上。
该飞行控制器 支持的制造商.
规格
| 特点 | 详细信息 |
|---|---|
| 重量 | 6 g |
| 单片机 | 216MHz、32 位 ARM M7 STM32F765II |
| 内存 | 256KB FRAM |
| 2Mbit 闪存 | |
| 512KB SRAM | |
| 固件 | PX4 |
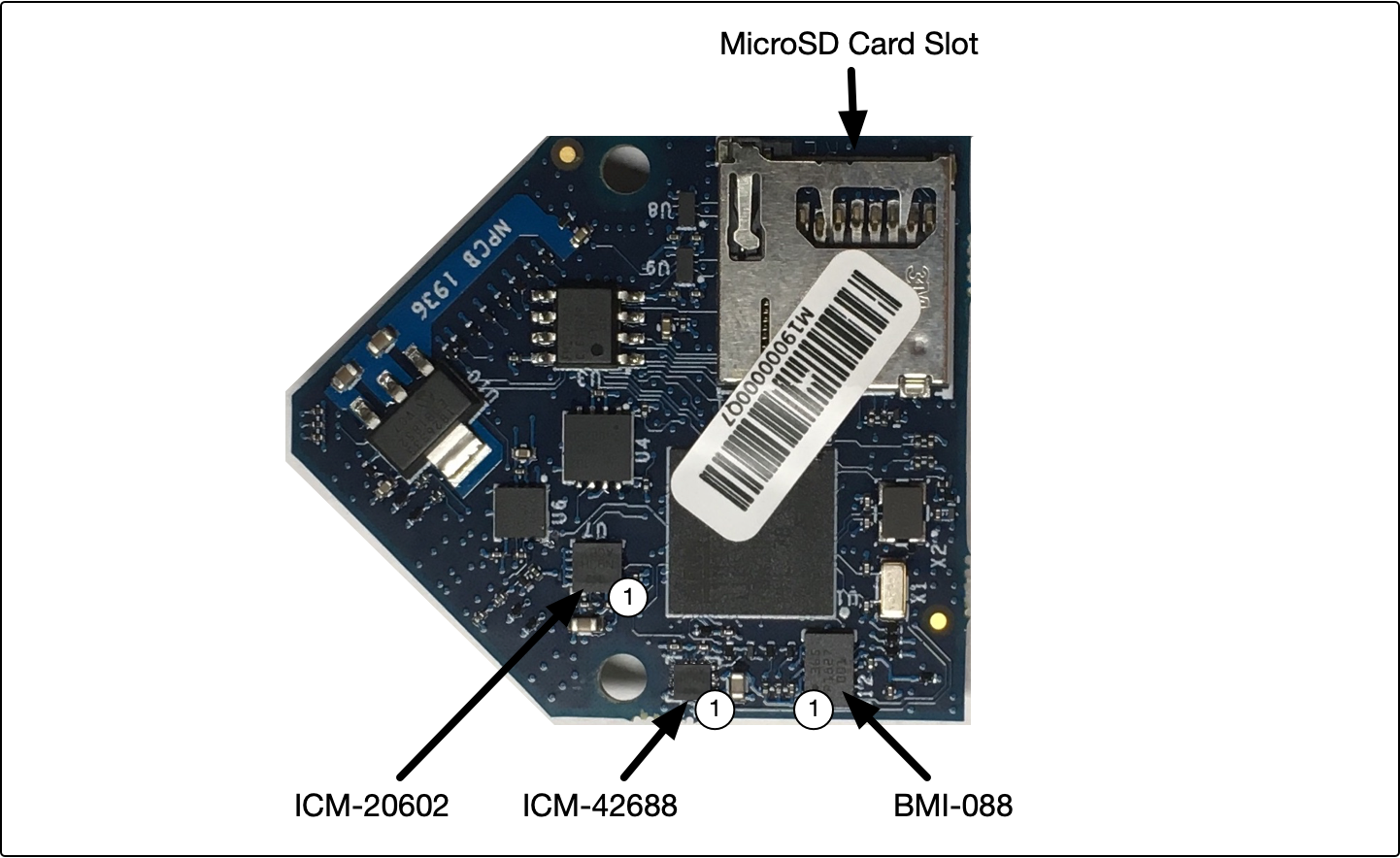
| IMU | ICM-20602 (SPI1) |
| ICM-42688(SPI2) | |
| BMI088 (SPI6) | |
| 气压计 | BMP388 (I2C4) |
| 安全元件 | A71CH (I2C4) |
| microSD 卡 | 关于支持的卡的信息 |
| 输入 | GPS/Mag |
| Spektrum | |
| 遥测 | |
| CAN 总线 | |
| PPM | |
| 输出 | 6 个 LED(2xRGB) |
| 8 个 PWM 通道 | |
| 额外接口 | 3 个串行端口 |
| I2C | |
| GPIO |
更详细的硬件文件可参见 这里.
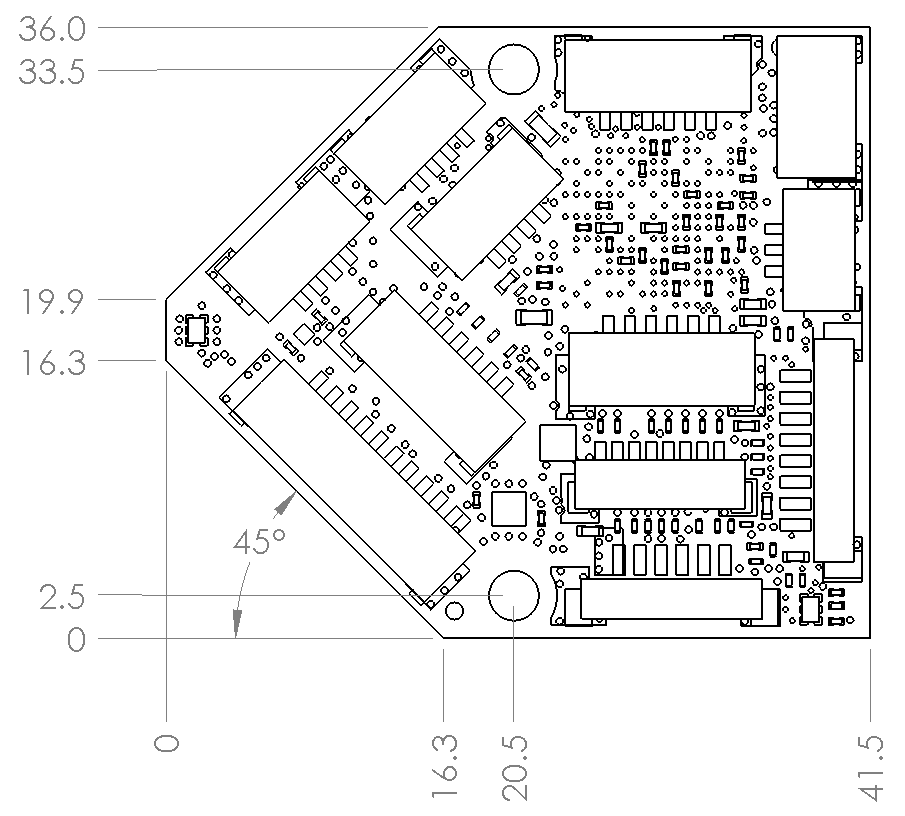
尺寸
PX4 Firwmare 兼容性
飞行核心 v1 完全兼容 PX4 v1.11 版的 PX4 官方固件。
ModalAI 维护一个 分支 PX4 版本 PX4 v1.10。这包括计划上游化的 VIO 和 VOA 改进。
有关固件的更多信息,请参见 这里.
QGroundControl 支持
QGroundControl 4.0 及更高版本支持该电路板。
可用性
- 飞行核心全套设备
- 飞行核心板 (仅)
- 飞行核心与 VOXL 配套计算机集成在一块印刷电路板上
- 飞行核心集成了 VOXL 配套计算机和避障摄像机(VOXL Flight Deck)。 (数据表)
- 装配有 VOXL 和相机的飞行核心系统
快速入门
定向
下图显示了建议的方向,它对应于 旋转_无 从 PX4 v1.11 版开始(以及在 ModalAI 维护的 PX4 v1.10 分支)
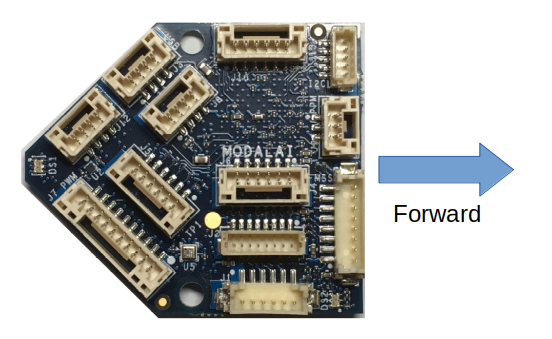
对于 PX4 v1.10 的稳定版本 QGroundControl 使用
旋转_偏航_180用于上述方向。
连接器
有关引脚布局的详细信息,请参见 这里.
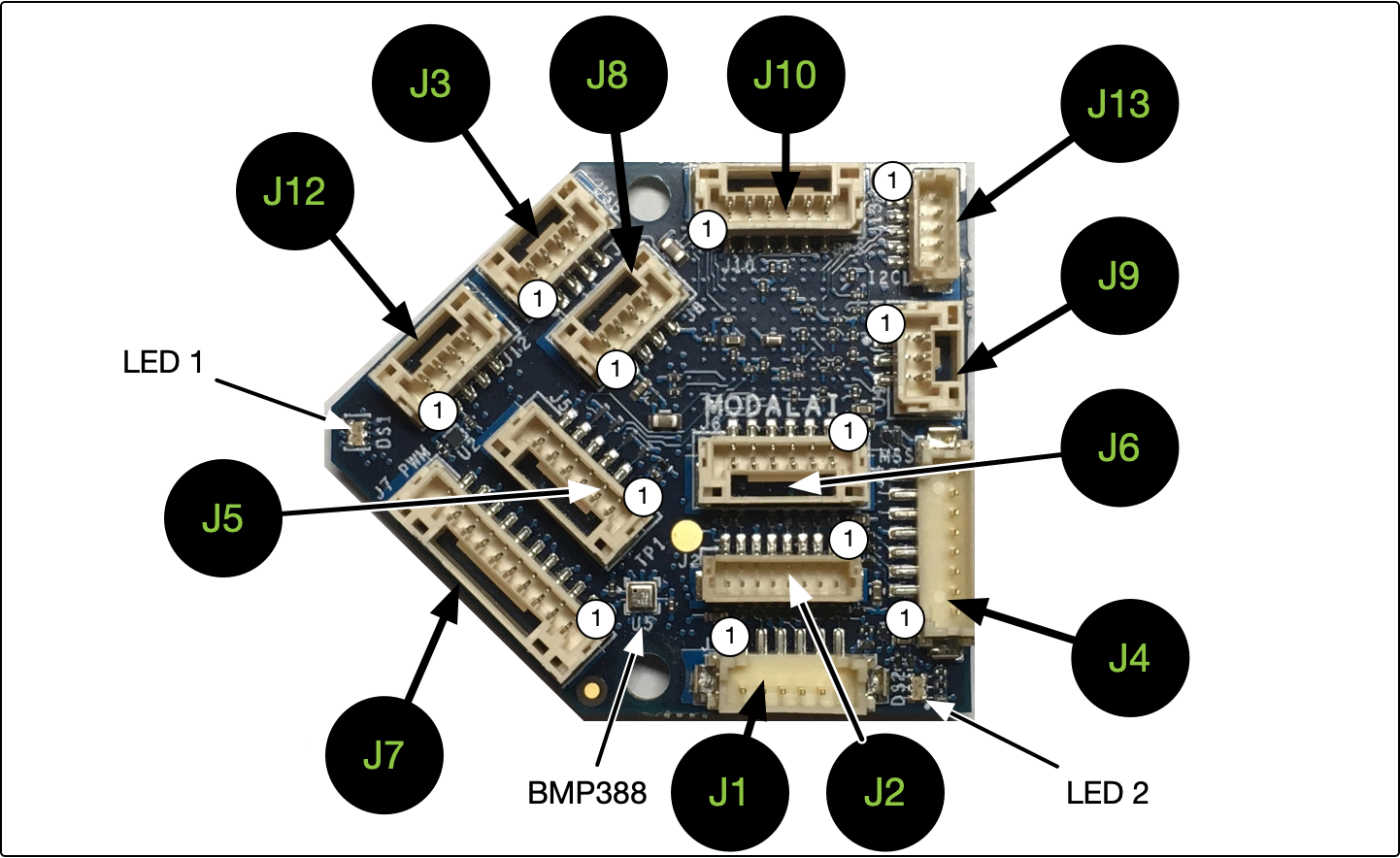
| 连接器 | 摘要 |
|---|---|
| J1 | VOXL 通信接口连接器(TELEM2) |
| J2 | 编程和调试连接器 |
| J3 | USB 连接器 |
| J4 | uart2,uart esc(telem3) |
| J5 | 遥测连接器(TELEM1) |
| J6 | VOXL-电源管理输入/扩展 |
| J7 | 8 通道 PWM 输出连接器 |
| J8 | CAN 总线连接器 |
| J9 | PPM RC 输入 |
| J10 | 外部 GPS & 磁力计连接器 |
| J12 | RC 输入,Spektrum/SBus/UART 连接器 |
| J13 | I2C 显示器(备用传感器连接器)/安全按钮输入 |
用户指南
用户指南全文 这里.
如何建造
至 建造 PX4 为这一目标:
make modalai_fc-v1
串行端口映射
| UART | 设备 | 港口 |
|---|---|---|
| USART1 | /dev/ttyS0 | GPS1 (J10) |
| USART2 | /dev/ttyS1 | TELEM3 (J4) |
| USART3 | /dev/ttyS2 | 调试控制台 (J2) |
| UART4 | /dev/ttyS3 | 扩展 UART (J6) |
| UART5 | /dev/ttyS4 | TELEM2,主 VOXL 通信(J1) |
| USART6 | /dev/ttyS5 | RC (J12) |
| UART7 | /dev/ttyS6 | TELEM1 (J5) |
| UART8 | /dev/ttyS7 | 不适用 |
支持
请访问 http://support.modalai.com/ 了解更多信息。