稳定模式(固定翼)
 ;
; ;
;
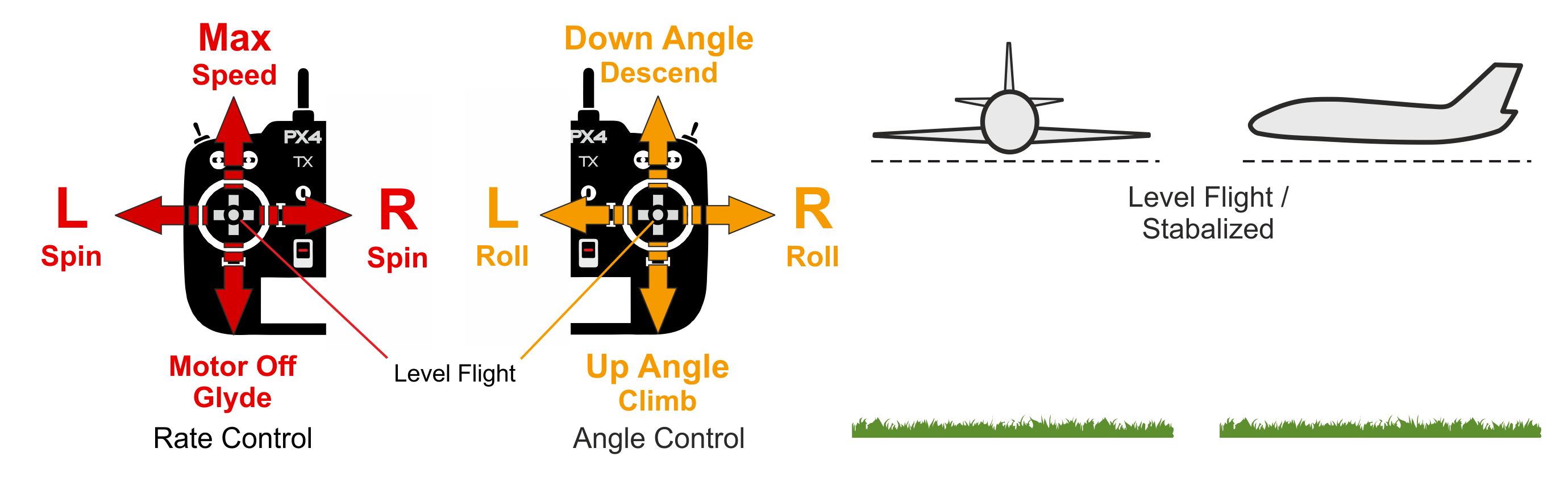
稳定模式 当遥控杆对中时,使飞行器进入直线和水平飞行,逆风保持水平姿态(但不包括飞行器的航向和高度)。
飞行器根据俯仰输入进行爬升/下降,如果滚动/俯仰摇杆不为零,则执行协调转弯。滚动和俯仰均受角度控制(不能倒立滚动或循环滚动)。
稳定模式 比 手动模式 因为你不能滚动或翻转它,而且很容易通过控制杆居中来调平载具。
如果将油门降至 0%(电机停止),飞行器将滑行。要执行转弯,必须在整个操作过程中保持该指令,因为如果松开翻滚指令,飞机将停止转弯并自动调平(俯仰和偏航指令也是如此)。
下图直观地显示了模式行为(对于一个 模式 2 发射器).
技术说明
遥控/手动模式,以 RP 为中心将载具保持水平。
- 居中的摇杆可使飞行器进行直线和水平飞行。飞行器的航向和高度无法保持,可能会随风漂移。
- 如果滚动/俯仰摇杆不为零,载具将进行协调转弯(在方向舵控制输入的基础上增加手动偏航输入,以控制侧滑)。
参数
| 参数 | 说明 |
|---|---|
| ; |