Acro 模式(固定翼)
 ;
; ;
;
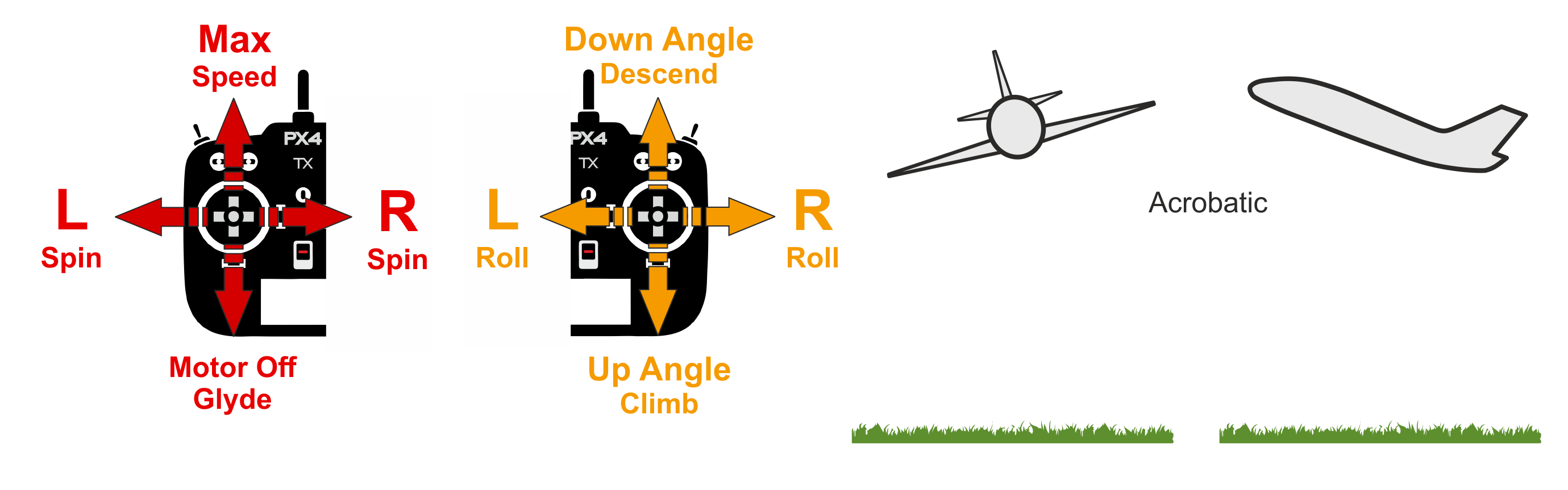
Acro 模式 是用于执行翻滚、空翻、失速和杂技动作等杂技动作的遥控模式。
滚动杆、俯仰杆和偏航杆控制围绕各自轴线的角度旋转速度,油门直接传递到输出混合器。当摇杆居中时,飞行器将停止旋转,但仍保持当前方向(侧向、倒置或其他),并根据当前动量移动。
技术说明
遥控模式,用于进行翻滚、空翻、失速和杂技动作等杂技表演。
RPY 摇杆输入被转换为角速度指令,由自动驾驶仪稳定。油门直接传递到输出混合器。
参数
| 参数 | 说明 |
|---|---|
| FW_ACRO_X_MAX | Acro 机身 x 最大速率(用户在 acro 模式下完全使用滚动杆输入时,控制器试图达到的机身 x 速率)。默认值:90 度。 |
| FW_ACRO_Y_MAX | Acro 身体 y 最大速率(在 acro 模式下,如果用户使用全俯仰摇杆输入,控制器尝试实现的身体 y 速率)。默认值:90 度。 |
| FW_ACRO_Z_MAX | Acro 身体 Z 最大速率(用户在 acro 模式下完全使用偏航摇杆输入时,控制器试图达到的身体 Z 速率)。默认值:45 度。 |